為滿足特殊群體智能化出行需求,攻克傳統輪椅技術短板,本項目研發了一款智能輪椅。該輪椅借助攝像頭與激光雷達,精準感知環境、檢測障礙物;融合激光 SLAM 技術和互聯網地圖,實現室內外無縫導航與自主避障;提供手柄、語音、手勢、遠程 APP 等多種交互方式,操作便捷。測試顯示其在感知、導航、交互上表現出色,應用前景廣闊。未來將從優化算法、豐富傳感器、增強個性化體驗等方向持續改進,提升產品競爭力——C.T.R.L.325.團隊
一、方案論證與設計
(一)系統總體設計
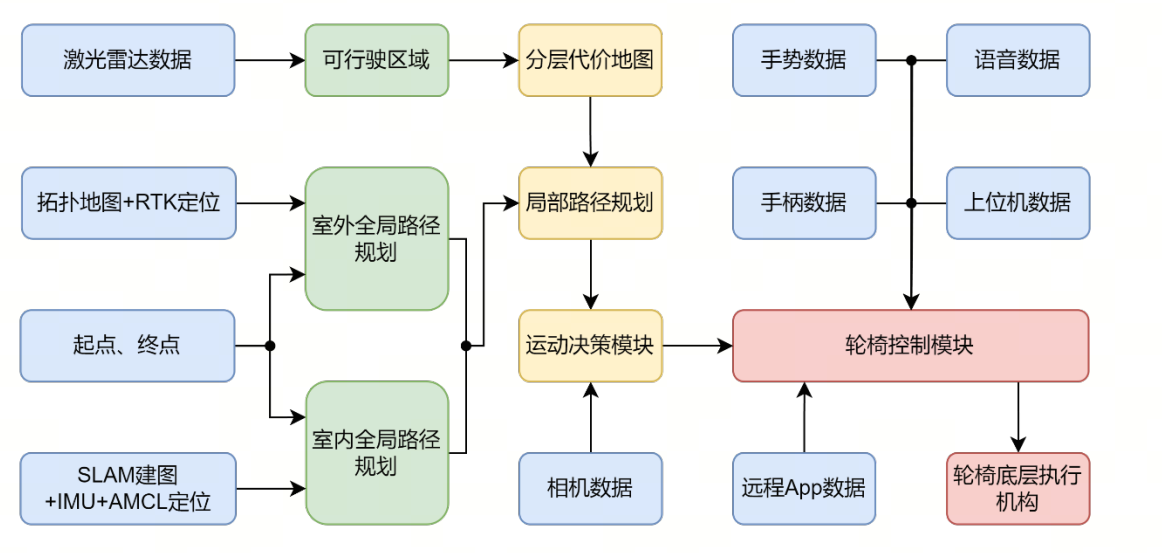
系統聚焦多模控制與感知、室內外廣域出行。室內利用 SLAM 算法建圖,結合 IMU 和 AMCL 算法定位;室外依托拓撲地圖與 RTK 實現定位及全局路徑規劃。激光雷達處理點云劃分可行區域,攝像頭感知路況,共同決策輪椅運動。人機交互提供手柄、手勢、語音、上位機及遠程 App 五種控制方式,遠程 App 支持監護人實時監控。
系統采用分層開發模式,涵蓋多模感知層、自主導航層、人機交互層、通信協議層和物理層。多模感知層通過攝像頭、激光雷達等采集環境數據;自主導航層基于 SLAM 和路徑規劃算法實現自主避障;人機交互層提供多元操控方式;通信協議層保障數據傳輸;物理層負責驅動和動力控制。
(二)系統技術路線
(1)基于攝像頭和激光雷達的多模感知技術
采用攝像頭與三維激光雷達采集環境數據。激光雷達利用 PCL 庫處理點云,識別可行駛區域;攝像頭基于 YOLOv7 模型檢測紅綠燈、斑馬線,實現輪椅自主調節。
(2)基于激光 SLAM 的室內自主導航技術
基于激光雷達的自主導航算法,搭配自適應蒙特卡羅定位(AMCL)實現定位。ROS 的 movebase 模塊整合激光雷達、地圖及定位數據,更新代價地圖,規劃路徑并驅動輪椅運動。
(3)基于互聯網地圖的室外廣域出行技術
通過百度地圖 API 獲取地圖數據,結合 RTK 模塊實現高精度定位。標注目標點獲取路線后,利用 gps_goal 導航包與 move_base 協同,完成室外導航閉環。
(4)智能輪椅多模態人機交互技術
交互分為 “乘員 - 輪椅” 和 “監護人 - 輪椅” 兩類。乘員可通過手柄、手勢、語音控制輪椅,并查看狀態;監護人能借助手機 App 遠程監控與操控。
(三)軟硬件平臺搭建
(1)智能輪椅底層結構
采用兩萬向輪、兩驅動輪底盤,前輪萬向輪便于窄空間轉向,后輪差速控制實現精準定位。自研底盤控制主板集成電源、電機驅動、STM32 控制等模塊,保障底層穩定運行。
(2)智能輪椅終端設備組成
選用 RDK X3 部署 YOLOv7 模型,實現實時對象檢測;采用 NVIDIA Jetson Orin NX 運行 ROS 系統,支持多傳感器數據處理與控制指令生成。
(3)智能輪椅關鍵傳感器介紹
選用速騰聚創 RSM1 三維激光雷達,基于 MEMS 技術生成高分辨率點云;配備索尼 IMX477 圖像傳感器的攝像頭,支持低光環境高清成像;采用 DETA100R RTK 定位模塊,融合 GNSS 與 INS 技術,提供厘米級定位與姿態數據 。
二、技術細節與原理
(一)基于 YOLOv7 的多場景識別技術
(1)構建數據集
采用網絡爬蟲與實地拍攝結合的方式,采集多城市、多環境條件下的交通圖像。涵蓋不同光照(日光、夜間等)、氣象(晴、雨)條件,以及多種拍攝視角,獲取行人過街信號燈、斑馬線場景。經人工篩選,剔除低質量與重復圖像,形成 PTL-C 數據集。通過分辨率統一、色彩校正和去噪預處理,將 1251 張圖像按 8:2 劃分為訓練集與驗證集。使用 LabelImg 工具標注,記錄類別標簽及歸一化坐標信息于同名 txt 文件。
(2)YOLOv7 模型
鑒于輪椅環境感知的實時性需求,選用 YOLOv7 模型。其采用擴展高效層聚合網絡(E-ELAN)提升學習能力,基于串聯模型的縮放方法平衡性能,應用卷積重參化等技術提高檢測精度。Backbone 采用 FEN 特征網絡,Head 使用 FPN-PAN 網絡融合特征,并調整網絡深度和寬度參數,以適配輪椅計算資源。
(3)實際場景測試
對比原模型與改進后模型,改進版在行人、紅綠燈和斑馬線識別中,定位更精準,誤檢與漏檢率降低,驗證了優化方案的有效性。
(二)基于激光點云的路面可行駛區域檢測算法
(1)地面點云分割
點云濾波
統計濾波器(SOR)基于統計學原理,通過定義鄰域、計算平均距離與全局統計量,去除點云中噪聲與孤立點,提升數據質量。
點云分割
RANSAC 算法以隨機采樣迭代擬合平面模型,計算點到平面距離篩選內點,重復優化直至滿足條件,實現地面點云分割。
(2)可行駛區域檢測
針對智能輪椅復雜行駛環境,在地面分割基礎上,通過劃分柵格投影點云、構建距離檢測器、應用平滑濾波器,確定無障礙物可行駛區域。
(3)分層代價地圖設計
分層代價地圖包含靜態地圖層(存儲固定障礙物)、障礙物層(更新動靜態障礙)、可行駛區域層(標記安全區域)和膨脹層(保障避障安全距離),優化地圖信息管理與路徑規劃。
(三)室內自主導航技術
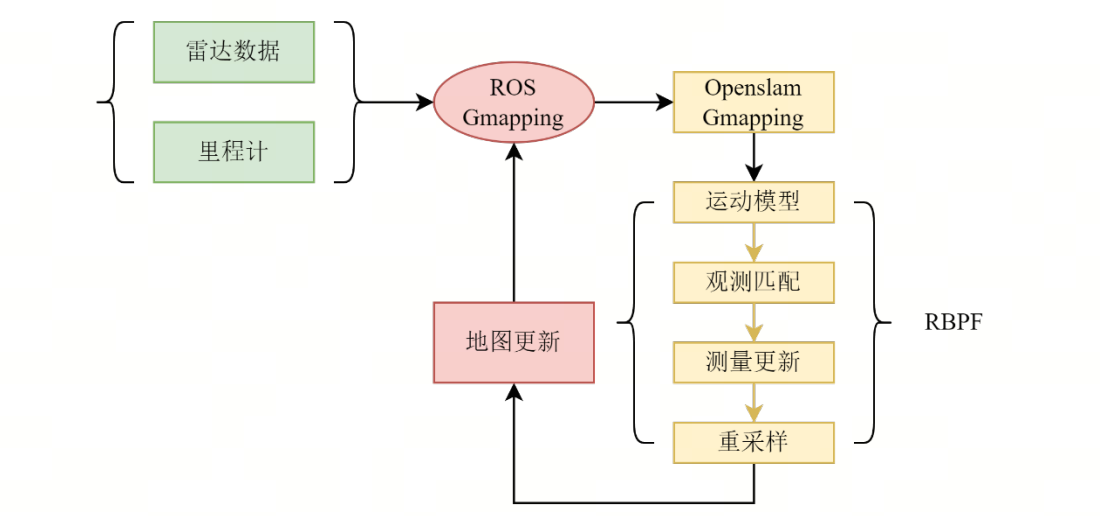
(1)二維地圖構建
采用 Gmapping 算法,通過粒子濾波實現同步定位與地圖構建,經初始化、運動預測、測量更新、重采樣和地圖更新循環,生成高精度二維柵格地圖。
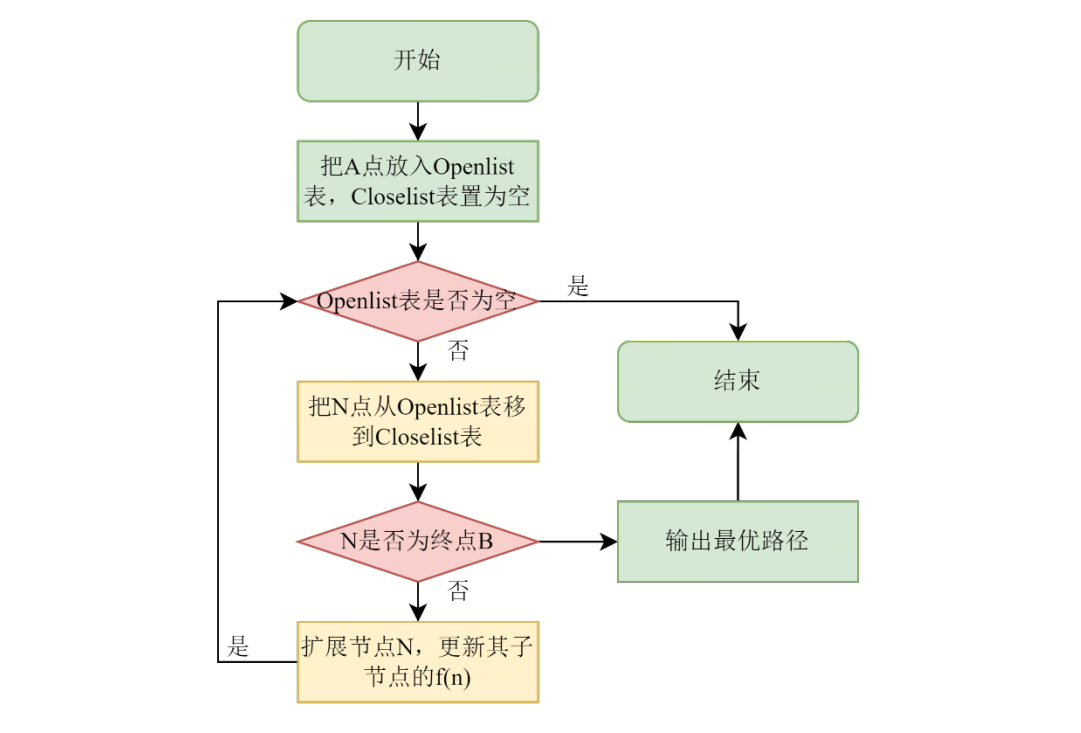
(2)全局路徑規劃
A * 算法結合最佳優先搜索與 Dijkstra 算法,利用啟發式函數評估路徑,通過節點擴展、篩選與回溯,尋找起始點到目標點的最短路徑。
(3)局部路徑規劃
動態窗口算法(DWA)依據速度限制采樣,預測軌跡并評價擇優,實現未知環境下實時避障的局部路徑規劃。
(4)自適應蒙特卡洛定位算法
AMCL 通過粒子濾波估計機器人位置,經初始化、預測、更新、重采樣和位置估計,結合傳感器數據動態調整粒子分布,獲取精準定位。
(四)室外廣域出行技術
(1)互聯網地圖 API
借助百度地圖 API,結合 Qt 開發上位機,實現位置實時顯示與地圖導航功能,提供直觀可視化界面。
(2)RTK 實時定位
采用 RTK 技術替代傳統 GPS,通過網絡模式接收差分定位數據,以千尋知寸服務為基準,將定位精度提升至厘米級。
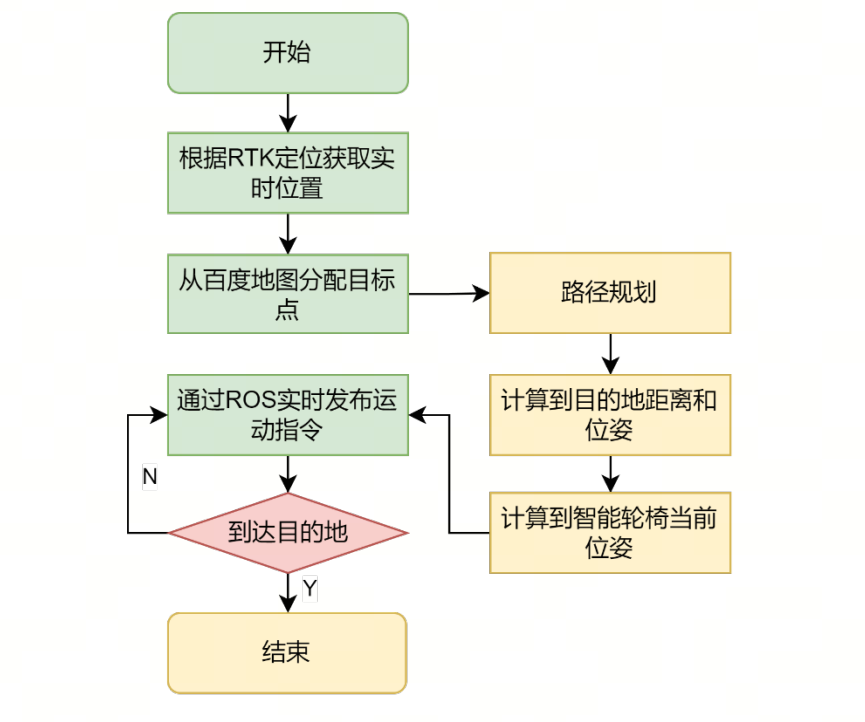
(3)GPS_goal
利用 ROS 的 gps_goal 功能包,基于 RTK 定位信息,計算路徑點距離并分解方向分量,驅動 move_base 結合 DWA 算法完成局部路徑規劃。
(五)人機交互技術
(1)手柄控制
霍爾手柄通過霍爾傳感器感應角度變化,轉換為電信號經處理后驅動輪椅執行前進、轉向等動作。
(2)語音控制
采集音頻,經預處理、特征提取與模板匹配,識別喚醒詞及 “前進”“停止” 等指令控制輪椅。
(3)手勢控制
ATK-PAJ7620 手勢模塊通過紅外信號檢測 9 種手勢,經識別后輸出結果控制輪椅運動。
(4)上位機控制
基于 QT 平臺開發觸屏上位機界面,跨平臺顯示傳感器參數與輪椅狀態,提供便捷操作體驗。
(5)遠程 APP 控制
采用 MJPEG-Streamer 實現視頻傳輸,手機 APP 發送指令經云平臺轉發,控制輪椅電機驅動模塊實現遠程操控。




)







)




)


