本文描述在ShareStation工作站虛擬化方案的部署過程。 將服務器上部署 Windows Server、DoraCloud,并創建帶有vGPU的虛擬桌面。
GPU分區技術介紹
GPU-P(GPU Partitioning) 是微軟在 Windows 虛擬化平臺(如 Hyper-V)中引入的 GPU 資源分配技術,屬于 Discrete Device Assignment (DDA) 的擴展功能。其核心目標是將單個物理 GPU 的計算和顯存資源動態劃分為多個虛擬 GPU(vGPU),允許多個虛擬機(VM)共享同一塊物理 GPU,同時保持接近原生的圖形性能。
Windows Server 2025版本支持GPU分區特性。NVIDIA在2025年3月發布的NVIDIA vGPU 18.0支持 Microsoft Windows Server 2025,用戶能夠利用 GPU 分區和跨分布式環境實時遷移等高級管理功能。 借助這些功能,用戶可以高效管理多個工作負載、進行硬件維護和升級軟件,而無需中斷虛擬機。
此外,NVIDIA vGPU 18.0 支持帶有 Windows Server 2025 的 Windows Subsystem for Linux (WSL)。這一增強功能使其成為在嵌套虛擬化中進行軟件開發、測試和運行基于 Linux 的應用程序的理想解決方案。
DoraCloud作為一款支持多平臺的云桌面系統,支持Hyper-V、Proxmox VE、XenServer和VMware。DoraCloud最近正式發布了V4.0版本,提供了對Windows Server 2025、GPU分區和NVIDIA vGPU 18.0的支持。 支持GPU分區的NVIDIA顯卡型號有:
- NVIDIA A2
- NVIDIA A10
- NVIDIA A16
- NVIDIA A40
- NVIDIA L2
- NVIDIA L4
- NVIDIA L40
- NVIDIA L40S
軟硬件環境:
硬件環境
Dell T3680工作站,i7-14700,64G內存,480G企業級SSD,NVIDIA A2,千兆網卡
網絡環境
局域網環境,可以訪問互聯網,局域網內開啟了DHCP服務。
軟件清單
- Windows Server 2025
- NVIDIA vGPU 18.1
- DoraCloud V4.0 for Hyper-V
- Windows 10
部署過程
安裝Windows Server系統、驅動程序和Hyper-V角色
1、安裝 Windows Server 2025,選擇數據中心版本。
2、安裝驅動。主板驅動、網卡驅動。
3、安裝 NVIDIA vGPU的Host驅動
將Display.Driver目錄拷貝到硬盤,然后進入驅動的目錄,執行如下命令:
pnputil /add-driver nvgridswhostserver.inf /subdirs /install /reboot
安裝后,執行如下命令,查詢GPU分區是否啟用。
Get-VMHostPartitionableGpu
如果GPU分區沒有啟用,可能是硬件不支持SR-IOV,請檢查服務器的BIOS設置,是否開啟了SR-IOV的相關設置。可以參考如下設置。不同服務器的名稱可能存在差異。
Processor Settings中, 【Virtualization Technology】 設置為 Enable Integrate Devices中, 【SR-IOV Global Enable】 設置為 Enable 【Memory Mapped I/O above 4G】 設置為 Enable 【Memory Mapped I/O base】 設置為 56TB
4、安裝Hyper-V角色。
可以通過如下腳本安裝Hyper-V角色。
http://vdi.doracloud.cn:9000/software/Pre-Setup.ps1
也可以通過Windows Server的服務器管理,添加Hyper-V角色。
安裝DoraCloud桌面虛擬化軟件
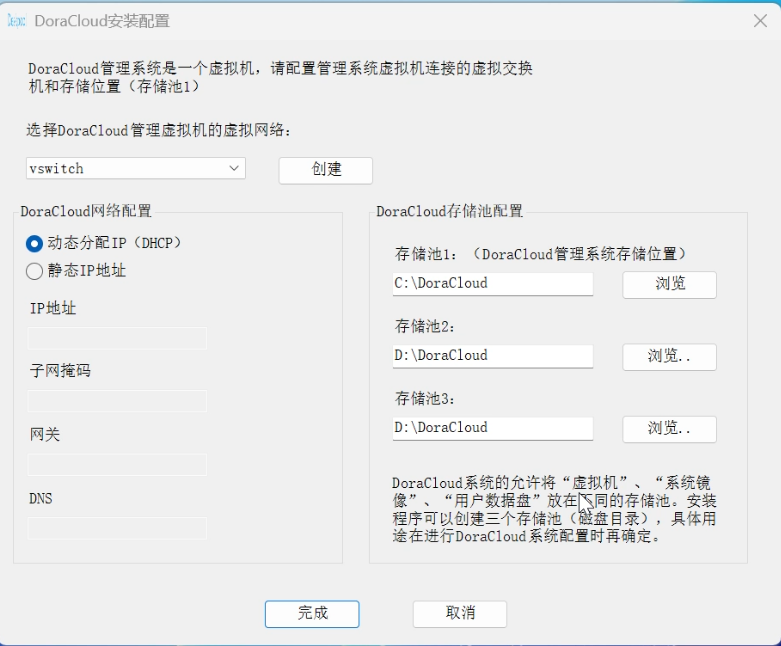
1、運行DoraCloud的安裝程序。
運行DoraCloud for Hyper-V安裝程序,選擇網絡和存儲池配置。?
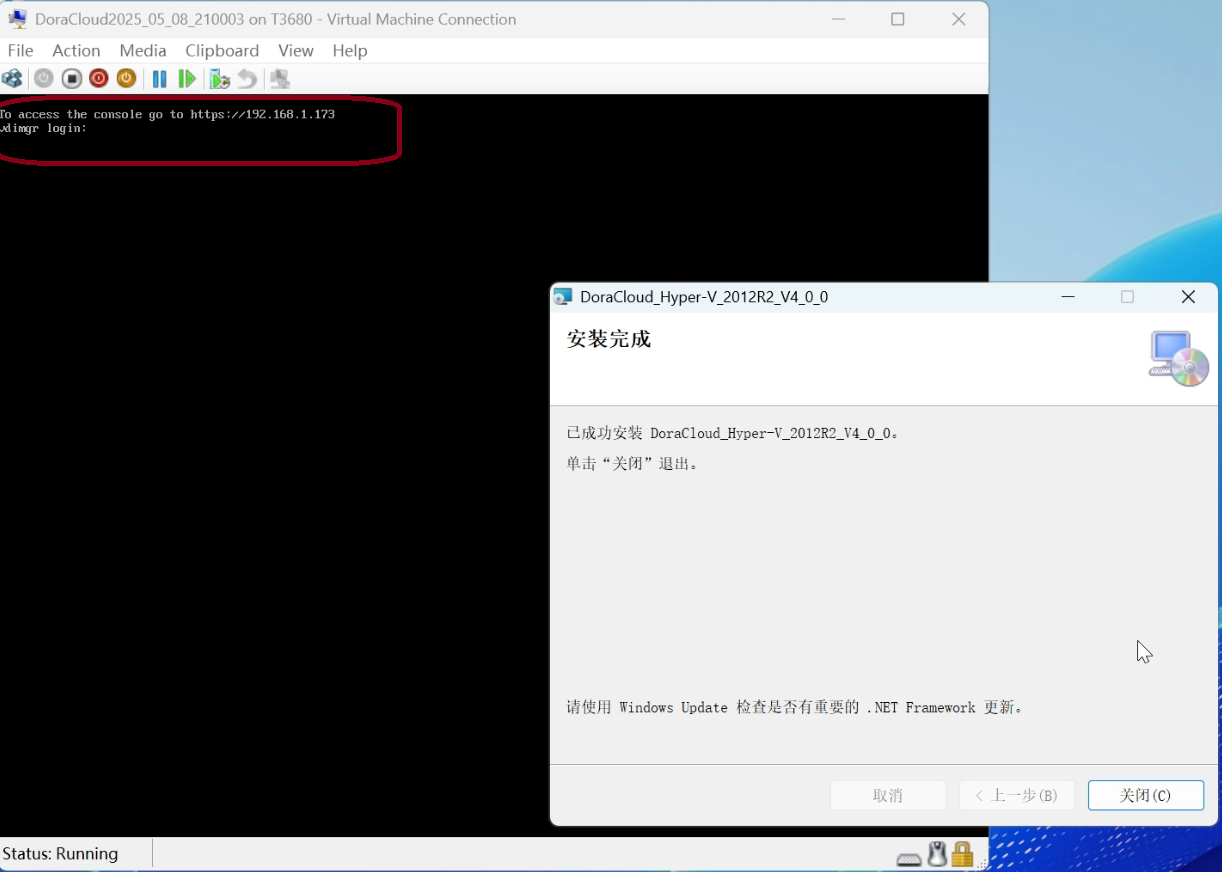
?安裝完畢后,會創建一個Linux虛擬機,這個虛擬機運行著DoraCloud管理系統。注意這個虛擬機的IP地址,就是DoraCloud管理系統的地址。?
2、登錄DoraCloud管理后臺,配置虛擬化、配置資源池、配置集群、配置用戶數據庫,完成系統的初始化配置。

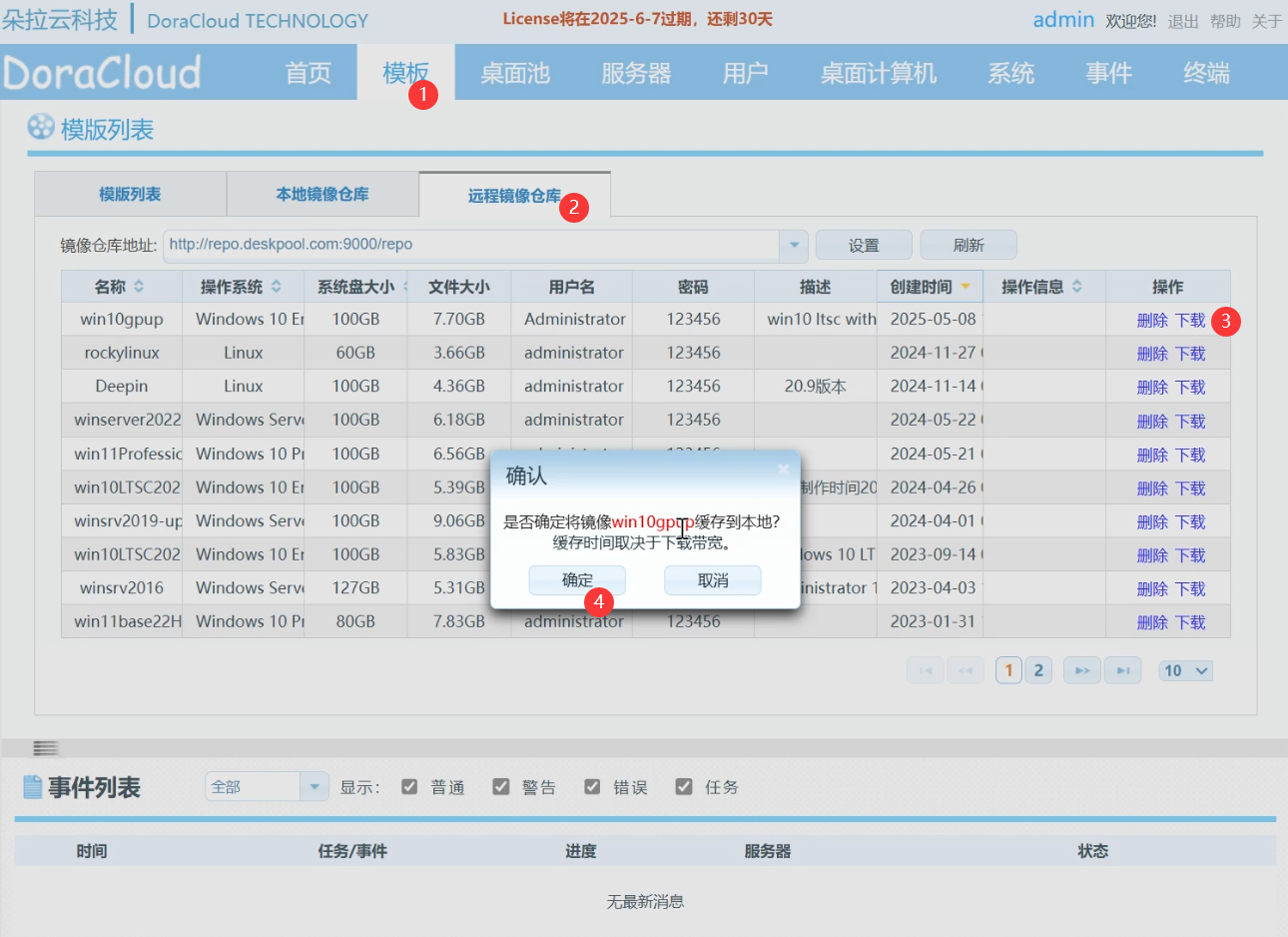
3、進入主菜單【模板】、【遠程鏡像倉庫】,下載 win10gpup這個模板。
4、創建桌面池,選擇GPU型號為:NVIDIA A16,選擇vGPU型號為:A16-2Q。

在【桌面計算機】菜單中,查看虛擬機創建情況,計算機進入[正在運行]狀態,表示創建成功。可以被分配給用戶。

5、創建群組和用戶。


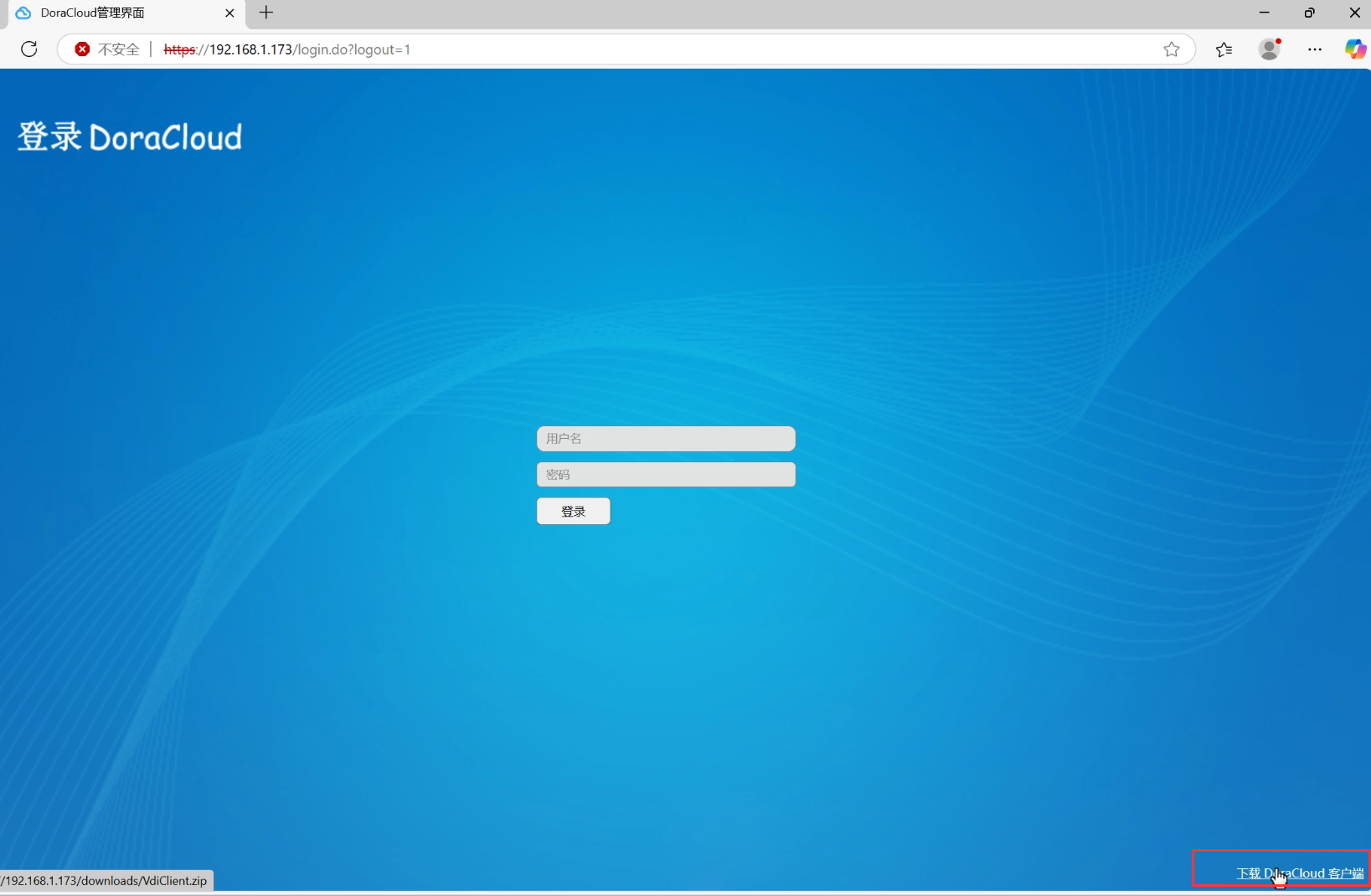
6、下載安裝DoraClient,使用DoraClient登錄云桌面。
在DoraCloud后臺的右下角,可以下載DoraClient。
安裝后,啟動DoraClient,設置服務器地址為 DoraCloud管理系統的地址。
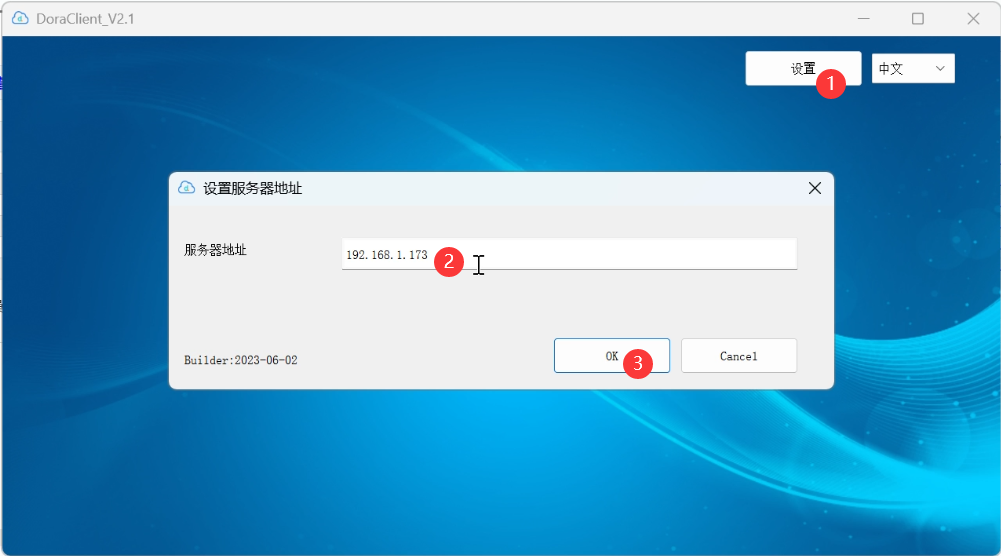
然后輸入用戶賬號,即可登錄云桌面系統。
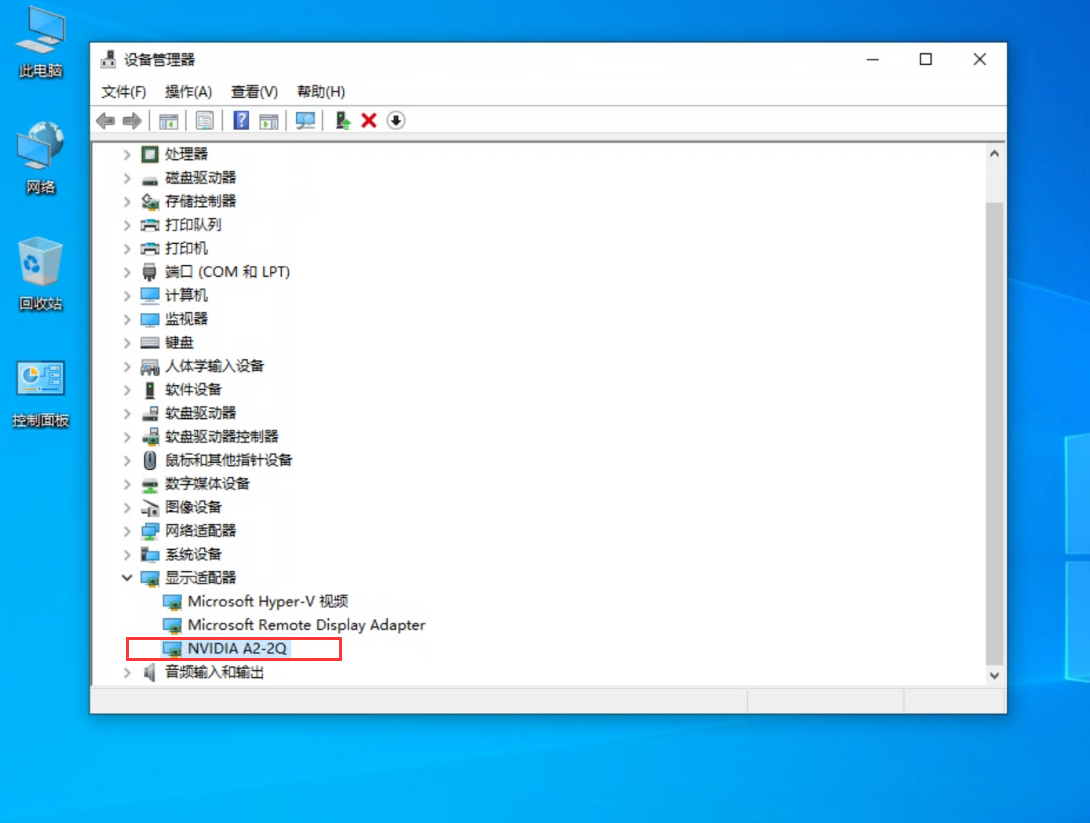
7、檢查顯卡,顯卡名稱為 NVIDIA A2-2Q,打開3D軟件,可以正常運行。
登錄云桌面后,在設備管理中查看顯卡類型,可以看到 NVIDIA A2-2Q。
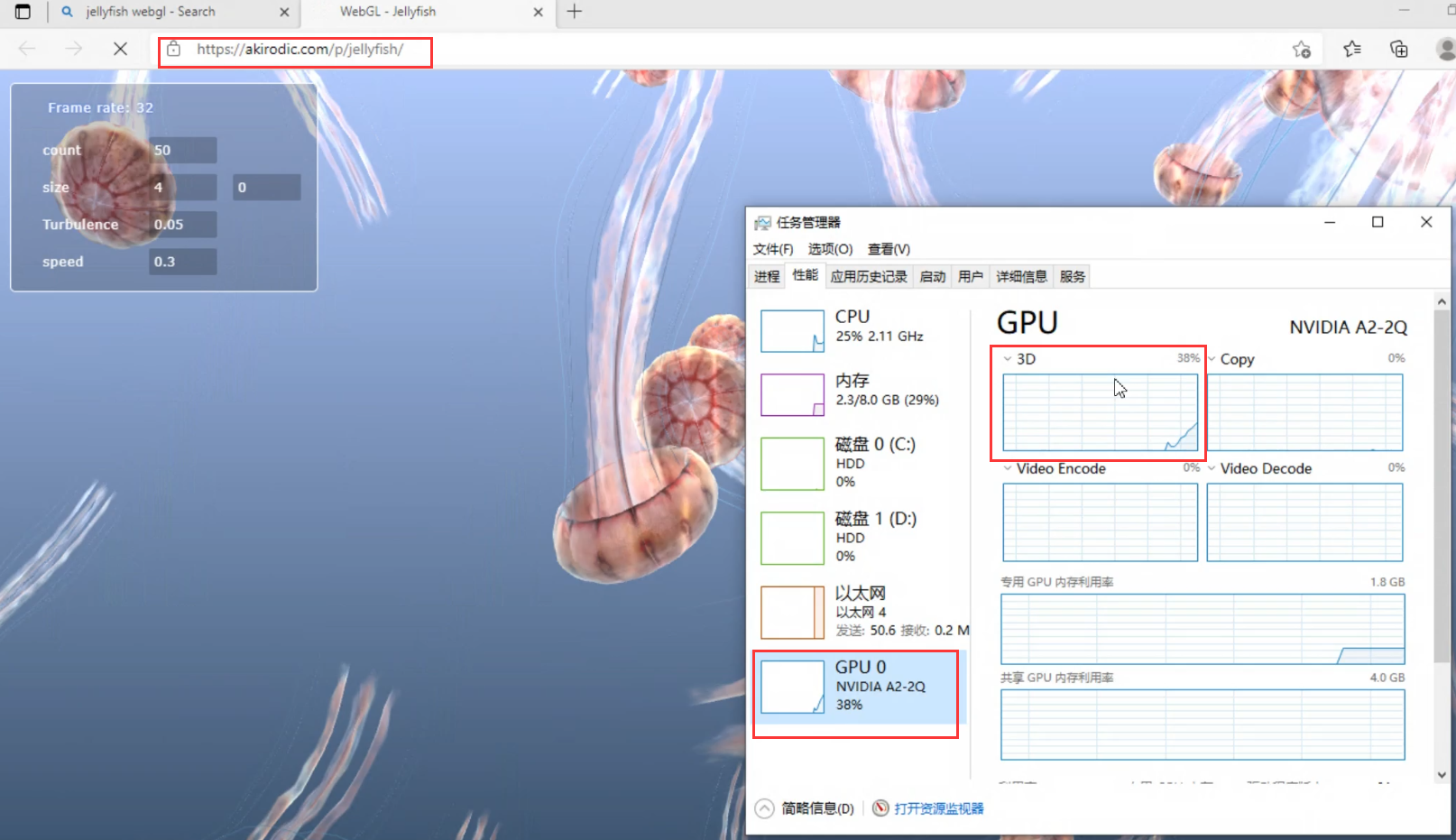
打開瀏覽器,訪問 webgl的測試網址:?WebGL - Jellyfish?,可以看到水母的圖片。 通過任務管理器,可以看到GPU的使用率。
總結
DoraCloud for Hyper-V 新增了對Windows Server 2025以及GPU分區技術的支持,能夠在VDI解決方案中提供vGPU,滿足專業設計、AI等場景的業務需求。







)
)


 附源碼)
![[人機交互]交互設計過程](http://pic.xiahunao.cn/[人機交互]交互設計過程)






