《IET Cyber-Systems and Robotics》出版山東大學?Tenglong Zhang 和 Guoliang Liu?團隊的研究成果,文章題為“Adaptive Safe Braking and Distance Prediction for Overhead Cranes With Multivariation Using MLP”。
?摘要
橋式起重機的緊急制動及其制動距離預測是其安全運行中的關鍵難題。本文采用多層感知器(MLP)實現具有多種變量的橋式起重機自適應安全距離預測功能。首先,構建了橋式起重機的離散動力學模型,并在角度約束下引入模型預測控制(MPC)以保證安全制動;其次,分析并篩選了影響安全距離預測的輸入變量,分別評估其對MLP預測精度的影響;然后,構建訓練集和測試集,在訓練集上對MLP模型進行了優化;最后,與傳統nlinfit算法對比,結果表明基于MLP的自適應安全距離預測方法在橋式起重機中的應用更具優越性。實驗證實,該方法可有效抑制載荷擺動角度,實現最小擺角的安全制動,研究結果具有顯著實用價值和創新性。
在現代工業生產與運輸中,橋式起重機因其能夠高效搬運重型貨物而被廣泛應用于各類場景。然而,這類系統通常通過操作小車進行控制,導致其本質上是一種欠驅動系統,增加了控制復雜性。尤其在動態環境中,工人和起重機共存的情況下,制動時的突發停止可能引發顯著的負載擺動,進而增加事故風險。因此,如何實現起重機系統的擺動控制成為研究熱點之一。
近年來,許多學者圍繞起重機的自動控制展開了大量研究,提出了多種控制方法,包括輸入成形算法、模糊控制、滑模控制、具有參數自適應機制的非線性控制以及模型預測控制(MPC)等。其中,模型預測控制憑借其對未來事件的預測能力和優化控制的優勢,在滿足擺角幅度限制和速度等安全約束方面表現出色。例如,Fang等人提出了一種將擺動約束轉化為控制輸入約束的新型MPC算法,有效將負載擺動控制在可接受范圍內,提升了系統性能。
盡管如此,實際應用中,橋式起重機在快速停車或突發制動時往往處于非零初始狀態,這會導致強烈的剩余負載擺動,從而增加事故風險。大多數現有控制方法未能充分考慮這一問題,尤其是在應對復雜的動態環境(如制動過程中負載擺幅和初始速度的變化)方面顯得不足。因此,研究人員開始關注在控制過程中準確預測起重機的安全制動距離,特別是在起重機具有非零初始速度的情況下。
為解決這一問題,本文提出了一種基于多層感知機(MLP)神經網絡的安全制動距離預測算法,并將其與MPC方法結合。該方法不僅能夠在不同初始狀態下精確預測起重機的安全制動距離,還能實時調整控制策略,確保負載擺幅保持在安全范圍內。這種方法的創新之處在于其處理起重機在現實操作中遇到的復雜動態變化的能力,為起重機的安全控制提供了新的思路和方法。
動態模型的構建
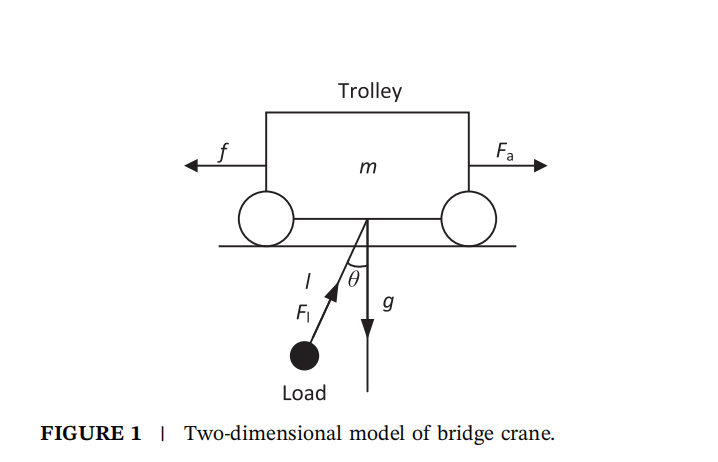
論文首先通過拉格朗日方程推導了橋式起重機系統的動態模型,并將其簡化為二維動態模型并進行了線性化處理。通過分析系統的廣義坐標下的拉格朗日方程,得到了描述系統運動的微分方程。隨后,假設繩索長度在負載水平移動過程中不變,進一步簡化了模型,得到了適用于制動過程分析的線性化二維動態模型。
制動算法的設計
為了實現從非零初始狀態到安全平穩停止的過渡,文中采用了基于MPC的防擺控制方法。通過對連續狀態空間表達式的離散化,建立了離散狀態空間模型,并進一步實現了模型的滾動時域控制。參考軌跡的設計基于非零初始狀態,利用雙曲正切函數構造了一個滿足快速穩定制動要求的參考軌跡。成本函數則通過最小化系統狀態與參考軌跡之間的差異來定義,最終通過求解不等式約束優化問題得到最優控制輸入。
安全距離預測模型的構建
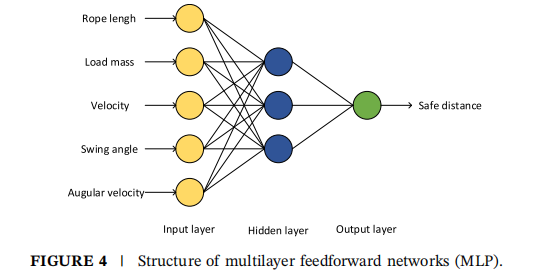
考慮到初始速度、負載擺角及其角速度對系統安全制動距離的影響,同時結合繩索長度和負載重量的變化,本文設計了一個基于MLP網絡的安全距離預測模型。該模型的輸入包括繩索長度、負載質量、小車速度、負載擺角及角速度。為了確保MLP網絡不會退化為線性模型,訓練過程中選用了ReLU激活函數。
在實驗部分,通過比較MLP網絡與nlinfit算法的表現,驗證了基于MLP的安全距離預測模型的優越性。實驗結果表明,MLP網絡在預測精度上明顯優于傳統方法,尤其是在處理多變量非線性擬合任務時展現出更高的準確性。
實驗平臺與算法驗證
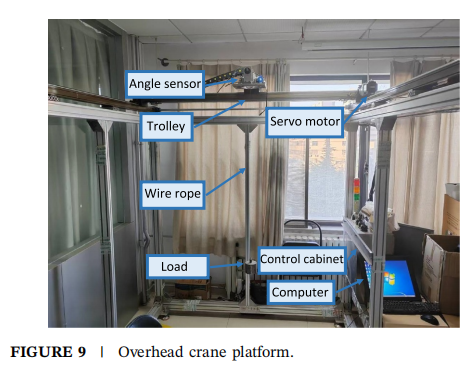
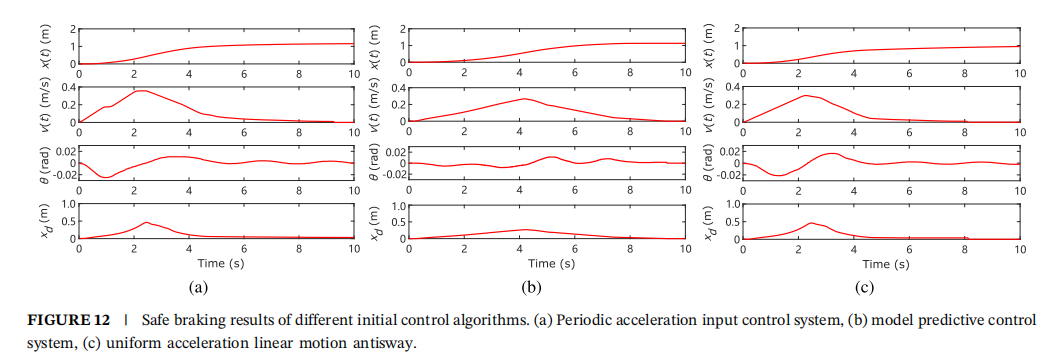
為了進一步驗證所提出的自適應安全距離預測與安全制動算法的有效性,作者在真實的橋式起重機實驗平臺上進行了測試。實驗結果顯示,無論采用何種初始控制算法,若系統突然進入制動狀態,該算法均能實現在橋梁起重機定位操作中與障礙物碰撞前的安全穩定停止。此外,實驗還證明了該方法在各種現實環境中的一致可靠性,確保了負載在整個制動過程中的擺動及其殘余量始終保持在系統規定的范圍內。
結論
本文針對橋式起重機與障礙物之間的安全制動距離預測問題,提出了一種綜合考慮多種影響因素的方法——基于MLP網絡的安全制動距離預測模型,并將其與MPC制動控制器相結合,以滿足安全制動需求。相較于另一種多變量非線性回歸方法,基于MLP網絡的安全制動距離預測方法展示了更高的預測精度。通過在真實起重機平臺上的實驗驗證,證實了該方法在滿足安全制動要求方面的有效性。
總的來說,這項研究不僅為橋式起重機的安全控制提供了新的解決方案,也為其他類型的起重設備乃至更廣泛的工業自動化領域帶來了啟示。未來的工作可以進一步探索如何將更多先進的機器學習技術應用于此類復雜系統的控制中,以提升整體的安全性和效率。

)



--- 銷量預估)





)

 : Fisk‘s proof)





