一、背景
rt-linux系統有其非常大的實時性的優勢,但是與之俱來的是該系統上有一些天然的缺陷。由于rt-linux系統允許進程在內核態執行的邏輯里,在持鎖期間,甚至持spinlock鎖期間,都能被其他進程搶占。這一特性能帶來實時性的好處,即能最大限度的滿足高優先級進程的優先運行,但是勢必會帶來一定壞處,也就是某些底層鎖會因此在持有的情況下被迫不能繼續執行(被別的任務搶占),導致別的任務也需要訪問該底層鎖的時候,就會阻塞,這種情況會因為開啟cgroup后更加加劇。
它會導致一些看似很不合理的情況,比如兩個看似毫無關系的進程卻有因為其中一個執行到一半被cgroup限額了導致另外一個進程一直在等前者繼續運行從而來喚醒自己。老實說,這種情況應該也能在普通內核開啟cgroup的cpu限額后也能出現,但是普通內核由于spinlock是禁用搶占的,而底層邏輯里的鎖大部分還是spinlock,所以普通內核里因為cgroup限額導致底層邏輯阻塞兩個看似不相關的進程的情況還是比較少的。另外一方面,普通內核里如果發生類似的情況就是使用了mutex,而使用了mutex那就是可以認為是能忍受一定的等待的,同樣的,對于底層邏輯也一樣,底層邏輯里要使用mutex的地方肯定也都是默認能忍受一定等待的,那么這時候發生cgroup cpu的限額導致這樣的等待又多持續了一段時間,那也理應能接受的。
雖然rt-linux有針對鎖有優先級繼承的邏輯來保證杜絕優先級反轉的情況,比如如果普通進程訪問了一個spinlock但是被RT進程搶占了,而RT進程執行完之后,普通進程所在的cgroup組又限額導致普通進程不能進一步執行邏輯,而導致spinlock一直退不出來。這時候,如果是一個實時進程要訪問該鎖,那么由于優先級繼承的邏輯,普通進程就會被臨時提高優先級,提到到要用鎖的進程的優先級和自己優先級中的較高者,這個例子里就是提高到實時優先級,所以普通進程又能執行下去了。關于該優先級反轉的進一步細節見之前的博客?rt-linux之防止優先級反轉-CSDN博客?。
但是,剛才說是要使用該鎖的進程是實時進程的情況,但是如果要使用該鎖的后者并不是實時進程,而是普通進程的話,那么就算提高優先級也是在普通進程這個調度類范疇,也受cgroup cpu的管控,仍然無法拿到額外的運行時間,還得等cgroup cpu的period timer重新補充時間來運行。這就會導致后面要拿鎖的進程要等很長的時間,而后面要拿鎖的進程和前者持鎖被throttle的進程可能它們之間是表面并不關聯的,關聯的部分可能就是底層的邏輯,這就會導致一些比較詭異難理解的現象出來。這種現象,我們后面的博客會用一些例子程序來模擬出來,并用圖示來進一步解釋。
這篇博客里,我們只討論rt-linux內核里會因為cgroup限額導致死鎖的情況,在下面第二章里,我們給出復現的程序和復現方法,在第三章里,我們來闡述其原理,并給出相應的解法。
二、復現程序和復現方法
2.1 復現程序
2.1.1 復現程序用的內核模塊
#include <linux/module.h>
#include <linux/capability.h>
#include <linux/sched.h>
#include <linux/uaccess.h>
#include <linux/proc_fs.h>
#include <linux/ctype.h>
#include <linux/seq_file.h>
#include <linux/poll.h>
#include <linux/types.h>
#include <linux/ioctl.h>
#include <linux/errno.h>
#include <linux/stddef.h>
#include <linux/lockdep.h>
#include <linux/kthread.h>
#include <linux/sched.h>
#include <linux/delay.h>
#include <linux/wait.h>
#include <linux/init.h>
#include <asm/atomic.h>
#include <trace/events/workqueue.h>
#include <linux/sched/clock.h>
#include <linux/string.h>
#include <linux/mm.h>
#include <linux/interrupt.h>
#include <linux/tracepoint.h>
#include <trace/events/osmonitor.h>
#include <trace/events/sched.h>
#include <trace/events/irq.h>
#include <trace/events/kmem.h>
#include <linux/ptrace.h>
#include <linux/uaccess.h>
#include <asm/processor.h>
#include <linux/sched/task_stack.h>
#include <linux/nmi.h>
#include <linux/version.h>
#include <linux/sched/mm.h>
#include <asm/irq_regs.h>
#include <linux/kallsyms.h>
#include <linux/kprobes.h>
#include <linux/stop_machine.h>struct kprobe _kp1;//static bool _blog = false;int getfullpath(struct inode* inode, char* i_buffer, int i_len)
{struct dentry* dentry;//printk("inode = %ld\n", inode->i_ino);//spin_lock(&inode->i_lock);hlist_for_each_entry(dentry, &inode->i_dentry, d_u.d_alias) {char* buffer, * path;buffer = (char*)__get_free_page(GFP_KERNEL);if (!buffer)return -ENOMEM;path = dentry_path_raw(dentry, buffer, PAGE_SIZE);if (IS_ERR(path)) {continue;}strlcpy(i_buffer, path, i_len);//printk("dentry name = %s , path = %s", dentry->d_name.name, path);free_page((unsigned long)buffer);}//spin_unlock(&inode->i_lock);return 0;
}#define DEVICE_NAME "testcgroupbug"
#define IOCTL_SET_MODE _IOW('a', 1, long)static struct proc_dir_entry* proc_entry;
// static rwlock_t my_rwlock;
DEFINE_RWLOCK(my_rwlock);typedef struct testpara {int mode;int sleepsecond;
} testpara;// static ssize_t proc_read(struct file *file, char __user *buf, size_t count, loff_t *offset) {
// char message[256];
// ssize_t len = snprintf(message, sizeof(message), "Current mode: %d\n", mode);// return simple_read_from_buffer(buf, count, offset, message, len);
// }void deadloop_second(int i_time) {unsigned long start_time = jiffies;if (i_time < 0) {while (1);return;}else if (i_time == 0) {return;}else {while (time_before(jiffies, start_time + (unsigned long)(HZ * i_time))) {}}
}#include <linux/perf_event.h>
#include <linux/hw_breakpoint.h>struct perf_event* __percpu* sample_hbp;static void sample_hbp_handler(struct perf_event* bp,struct perf_sample_data* data,struct pt_regs* regs)
{//printk(KERN_INFO "%s value is changed\n", ksym_name);dump_stack();//printk(KERN_INFO "Dump stack from sample_hbp_handler\n");
}void register_prioritychange_dumpstack(void)
{int ret;struct perf_event_attr attr;void* addr = ¤t->prio;hw_breakpoint_init(&attr);attr.bp_addr = (unsigned long)addr;attr.bp_len = HW_BREAKPOINT_LEN_4;attr.bp_type = HW_BREAKPOINT_W;sample_hbp = register_wide_hw_breakpoint(&attr, sample_hbp_handler, NULL);if (IS_ERR((void __force*)sample_hbp)) {ret = PTR_ERR((void __force*)sample_hbp);return;}printk(KERN_INFO "HW Breakpoint for write installed\n");}void unregister_prioritychange_dumpstack(void)
{unregister_wide_hw_breakpoint(sample_hbp);
}static bool _bneedoutput = false;static enum hrtimer_restart hrtimer_callback(struct hrtimer* timer)
{printk(KERN_INFO "<cpu%d><comm%s>hrtimer_callback before read_lock!\n", smp_processor_id(), current->comm);read_lock(&my_rwlock);printk(KERN_INFO "<cpu%d><comm%s>hrtimer_callback before read_unlock!\n", smp_processor_id(), current->comm);read_unlock(&my_rwlock);printk(KERN_INFO "<cpu%d><comm%s>hrtimer_callback after read_unlock!\n", smp_processor_id(), current->comm);return HRTIMER_NORESTART;
}static struct hrtimer _testtimer;void register_hrtimer_soft(void)
{hrtimer_init(&_testtimer, CLOCK_MONOTONIC, HRTIMER_MODE_ABS_PINNED);_testtimer.function = hrtimer_callback;hrtimer_forward_now(&_testtimer, ns_to_ktime(10000));hrtimer_start_expires(&_testtimer, HRTIMER_MODE_ABS_PINNED);
}void unregister_hrtimer_soft(void)
{hrtimer_cancel(&_testtimer);
}static volatile bool bhasreadenterlock = false;static volatile bool bhaswriter = false;static volatile bool bhasregisterhrtimersoft = false;void deadloop_second_special(int i_time) {unsigned long start_time = jiffies;if (i_time < 0) {while (1);return;}else if (i_time == 0) {return;}else {while (time_before(jiffies, start_time + (unsigned long)(HZ * i_time))) {if (bhaswriter) {{unsigned long start = jiffies;while (time_before(jiffies, start + (unsigned long)(HZ / 25))) {}}if (!bhasregisterhrtimersoft) {bhasregisterhrtimersoft = true;register_hrtimer_soft();}}}}
}static int _readindex = 0;
static int _writeindex = 0;static long proc_ioctl(struct file* file, unsigned int cmd, unsigned long arg) {testpara para;if (cmd == IOCTL_SET_MODE) {if (copy_from_user(¶, (int __user*)arg, sizeof(testpara))) {return -EFAULT;}if (para.mode == 0) {int readindex = _readindex;_bneedoutput = true;_readindex++;if (bhaswriter) {printk(KERN_ERR "<cpu%d>readindex[%d]Not expected bhaswriter value! Need reload ko!\n", smp_processor_id(),readindex);return -EFAULT;}//register_prioritychange_dumpstack();printk(KERN_INFO "<cpu%d>readindex[%d]before read lock\n", smp_processor_id(), readindex);read_lock(&my_rwlock);bhasreadenterlock = true;printk(KERN_INFO "<cpu%d>readindex[%d]Read lock acquired.\n", smp_processor_id(), readindex);printk(KERN_INFO "<cpu%d>readindex[%d]Sleep second[%d]\n", smp_processor_id(), readindex, para.sleepsecond);// wait bhaswriter true and then register_hrtimer_softdeadloop_second_special(para.sleepsecond);// Perform read operations hereread_unlock(&my_rwlock);printk(KERN_INFO "<cpu%d>readindex[%d]Read lock released.\n", smp_processor_id(), readindex);//unregister_prioritychange_dumpstack();}else if (para.mode == 1) {int writeindex = _writeindex;_writeindex++;printk(KERN_INFO "<cpu%d>writerindex[%d]writer check bhasreadenterlock\n", smp_processor_id(), writeindex);while (1) {if (bhasreadenterlock) break;}printk(KERN_INFO "<cpu%d>writerindex[%d]before write lock\n", smp_processor_id(), writeindex);bhaswriter = true;write_lock(&my_rwlock);printk(KERN_INFO "<cpu%d>writerindex[%d]Write lock acquired.\n", smp_processor_id(), writeindex);printk(KERN_INFO "<cpu%d>writerindex[%d]Sleep second[%d]\n", smp_processor_id(), writeindex, para.sleepsecond);deadloop_second(para.sleepsecond);// Perform write operations herewrite_unlock(&my_rwlock);printk(KERN_INFO "<cpu%d>writerindex[%d]Write lock released.\n", smp_processor_id(), writeindex);_bneedoutput = false;}else {printk(KERN_ERR "<cpu%d>Invalid mode: %d\n", smp_processor_id(), para.mode);return -EINVAL;}return 0;}return -EINVAL;
}static const struct proc_ops proc_fops = {.proc_ioctl = proc_ioctl,
};static int proctestcgroup_init(void) {proc_entry = proc_create(DEVICE_NAME, 0666, NULL, &proc_fops);if (!proc_entry) {return -ENOMEM;}rwlock_init(&my_rwlock);printk(KERN_INFO "Module loaded: /proc/%s created.\n", DEVICE_NAME);return 0;
}static void proctestcgroup_exit(void) {proc_remove(proc_entry);printk(KERN_INFO "Module unloaded: /proc/%s removed.\n", DEVICE_NAME);
}int kprobecb_vdso_fault_pre(struct kprobe* i_k, struct pt_regs* i_p)
{if (_bneedoutput) {printk(KERN_INFO "<cpu%d><comm%s>sched_cfs_period_timer\n", smp_processor_id(), current->comm);//dump_stack();// {// struct kiocb *iocb = (struct kiocb *)i_p->di;// struct file *file = iocb->ki_filp;// struct address_space *mapping = file->f_mapping;// struct inode *inode = mapping->host;// int ret = 0;// char buf[128];// if ((ret = getfullpath(inode, buf, 128)) < 0) {// return 0;// }// printk("generic_file_write_iter file[%s]\n",// buf);// }}return 0;
}int kprobe_register_func_vdso_fault(void)
{int ret;memset(&_kp1, 0, sizeof(_kp1));_kp1.symbol_name = "sched_cfs_period_timer";_kp1.pre_handler = kprobecb_vdso_fault_pre;_kp1.post_handler = NULL;ret = register_kprobe(&_kp1);if (ret < 0) {printk("register_kprobe fail!\n");return -1;}printk("register_kprobe success!\n");return 0;
}void kprobe_unregister_func_vdso_fault(void)
{unregister_kprobe(&_kp1);
}static int __init testcgroupbug_init(void)
{kprobe_register_func_vdso_fault();proctestcgroup_init();return 0;
}static void __exit testcgroupbug_exit(void)
{kprobe_unregister_func_vdso_fault();proctestcgroup_exit();
}module_init(testcgroupbug_init);
module_exit(testcgroupbug_exit);
MODULE_AUTHOR("zhaoxin");
MODULE_DESCRIPTION("Module for testcgroupbug debug.");
MODULE_LICENSE("GPL");
2.1.2 復現程序用的rwlock_read用戶態程序
#include <cstring>
#include <iostream>
#include <csignal>
#include <thread>
#include <chrono>
#include <ctime>
#include <atomic>
#include <cmath>
#include <fstream>
#include <vector>
#include <memory>
#include <map>
#include <getopt.h>
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <linux/ioctl.h>
#include <linux/types.h>
#include <signal.h>
#include <fcntl.h>
#include <sys/types.h>
#include <sys/syscall.h>#define DEVICE_NAME "testcgroupbug"
#define IOCTL_SET_MODE _IOW('a', 1, long)typedef struct testpara {int mode;int sleepsecond;
} testpara;#define IOCTL_SET_MODE _IOW('a', 1, long)int main(int argc, char *argv[])
{if (argc != 2) {fprintf(stderr, "Usage: %s <sleep_time_in_seconds>\n", argv[0]);return 1;}int duration = atoi(argv[1]);int fd = open("/proc/testcgroupbug", O_RDWR);if (fd < 0) {printf("/proc/testcgroupbug do not exist!\n");return -ENOENT;}printf("/proc/testcgrouopbug succeed!\n");testpara para;para.mode = 0;para.sleepsecond = duration;if (__glibc_unlikely((ioctl(fd, IOCTL_SET_MODE, ¶)) < 0)) {printf("/proc/testcgroupbug ioctl fail!\n");return -errno;}printf("/proc/testcgroupbug ioctl success!\n");return 0;
}2.1.3 復現程序用的rwlock_write用戶態程序
#include <cstring>
#include <iostream>
#include <csignal>
#include <thread>
#include <chrono>
#include <ctime>
#include <atomic>
#include <cmath>
#include <fstream>
#include <vector>
#include <memory>
#include <map>
#include <getopt.h>
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <linux/ioctl.h>
#include <linux/types.h>
#include <signal.h>
#include <fcntl.h>
#include <sys/types.h>
#include <sys/syscall.h>#define DEVICE_NAME "testcgroupbug"
#define IOCTL_SET_MODE _IOW('a', 1, long)typedef struct testpara {int mode;int sleepsecond;
} testpara;#define IOCTL_SET_MODE _IOW('a', 1, long)int main(int argc, char *argv[])
{if (argc != 2) {fprintf(stderr, "Usage: %s <sleep_time_in_seconds>\n", argv[0]);return 1;}int duration = atoi(argv[1]);int fd = open("/proc/testcgroupbug", O_RDWR);if (fd < 0) {printf("/proc/testcgroupbug do not exist!\n");return -ENOENT;}printf("/proc/testcgrouopbug succeed!\n");testpara para;para.mode = 1;para.sleepsecond = duration;if (__glibc_unlikely((ioctl(fd, IOCTL_SET_MODE, ¶)) < 0)) {printf("/proc/testcgroupbug ioctl fail!\n");return -errno;}printf("/proc/testcgroupbug ioctl success!\n");return 0;
}2.1.4 依次啟動程序的腳本
再準備一個死循環程序,代碼如下,比較簡單:
#include <stdio.h>int main()
{while(1);return 1;
}然后就是一個腳本,來按照如下的時序來依次啟動程序:
#!/bin/bashpkill deadlooprmmod testcgroupbug
insmod testcgroupbug.kodmesg -cmkdir /sys/fs/cgroup/test
echo "500000 1000000" > /sys/fs/cgroup/test/cpu.maxtaskset -c 0 ./deadloop &
taskset -c 2 ./deadloop &
taskset -c 3 ./deadloop &
taskset -c 4 ./deadloop &
taskset -c 5 ./deadloop &sleep 3taskset -c 1 ./rwlock_read 5 &pid=$!echo $pid > /sys/fs/cgroup/test/cgroup.procs#sleep 2chrt -f 60 ./rwlock_write 3 &#sleep 2#./rwlock_read 10 &2.2 復現方法
復現方法比較簡單,就是在rt-linux內核上執行上面 2.1.4 里的腳本即可。
要注意的是 2.1.4 里的腳本是針對只有6個cpu的情況,如果cpu的數量較多,請自行根據cpu的數量調整腳本,意思就是把cpu1以外的其他核都跑一個死循環的任務,讓cpu 1相對比較閑,這樣更容易復現該死鎖問題。
三、原理及相應解法
3.1 死鎖原理
死鎖發生需要依賴一定的時序:
1)進程A在持有了rwlock的讀鎖之后,被其所在的cgroup cpu給throttle了
2)進程B持有了rwlock的寫鎖,由于rwlock的機制(一旦有人嘗試拿寫鎖,后續的讀者都會被阻塞)
3)一個軟timer的任務也需要訪問該rwlock的讀鎖,該軟timer的任務這時候訪問了該rwlock的讀鎖,所以只能等在那兒,執行不下去了
4)由于之前進程A已經被cgroup cpu給throttle了,且持有者讀鎖沒有釋放,軟timer的任務假設是在ktimer內核線程上運行,由于也需要拿讀鎖且讀鎖沒有釋放,所以該ktimer內核線程的當前這個處理timer到期的任務包括后面的處理timer到期的任務都得不到執行
5)而cgroup的period timer是pinned的timer,在一開始創建這個period timer如果綁定在某個核上,那因為pinned的模式就一直得在這個核上運行,所以假設綁定的這個核切好就是使用上面說的讀鎖而被阻塞的軟timer任務所在的核上,那么這個period timer就一直得不到執行。因為另外一個細節是,CONFIG_PREEMPT_RT的系統上該cgroup的period timer設的HRTIMER_MODE_ABS_PINNED和HRTIMER_MODE_REL都沒帶HARD所以都是在ktimer或ksoftirqd里運行,而不是硬中斷處理直接觸發執行的
6)另外,如果是mutex而不是rwlock,由于ktimer是一個FIFO 1的進程,根據rt-linux上的優先級繼承策略,被cgroup限制執行的進程A如果使用的不是rwlock而是mutex的話,會被臨時提高優先級到ktimer的FIFO 1優先級,這樣就不死鎖了。可是很遺憾,這個例子里,進程A是用的rwlock而不是mutex,由于rwlock允許有多個讀者,所以它并不能實施該優先級繼承的策略,因為優先級繼承的實現針對的是一個持鎖人的情況。
3.1.1 代碼解釋
其實在上面的邏輯描述還是比較清晰的,我們再來跟著看一下復現該bug用到的代碼。
先啟動的rwlock的讀者進程,走到了下面的內核模塊里的邏輯:
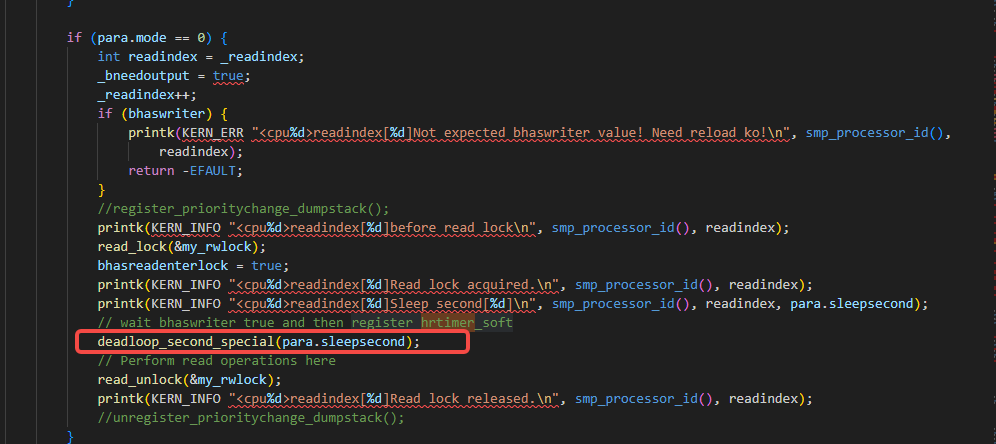
然后執行rwlock的writer,上圖里執行了deadloop_second_special函數,確保有rwlock的writer了之后再啟動軟hrtimer:
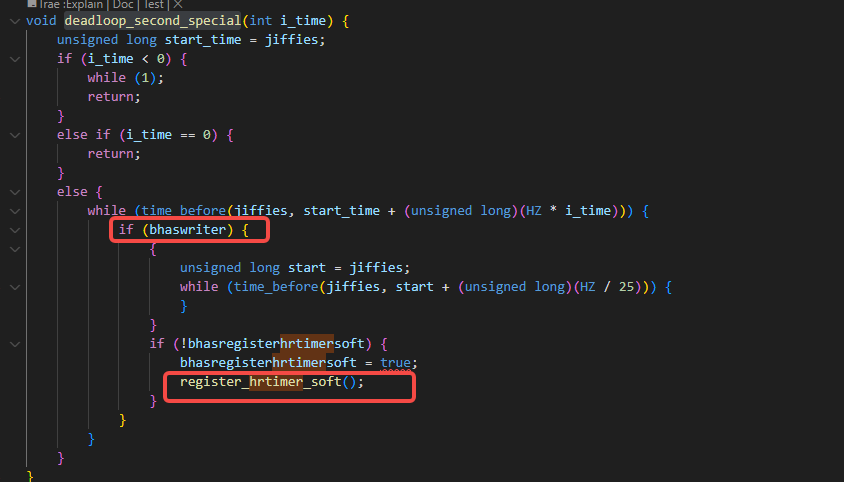
啟動軟hrtimer并設定PINNED:
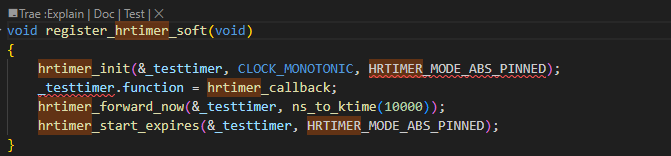
在該軟hrtimer的callback里使用rwlock進行讀:
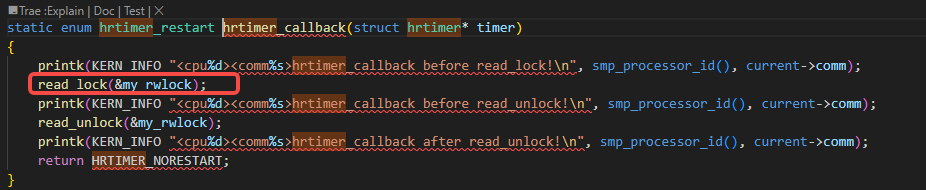
這時候就可能發生循環依賴的死鎖。
3.2 死鎖解法
我們有一個相對簡單的針對該死鎖問題的解法,改動如下:
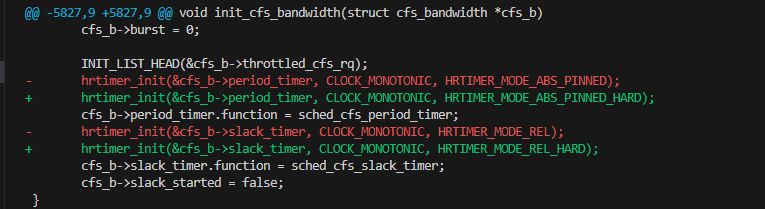
意思就是在rt-linux下把該cgroup cpu相關的兩個period相關的timer都改成和普通內核里的timer的實現方式一樣,即使用硬中斷響應該時間到期的事件,而不用當前rt-linux里采用的hrtimer的軟處理邏輯。







)


)




進行程序調試保姆級教程(2萬字長文))


應用于自動駕駛(ADAS)中的幾個方向,及相關論文示例)
