在導彈飛行控制過程中,需要時刻掌握導彈的飛行狀態?(速度、位置、姿態角等),這就有賴于描述導彈飛行狀態的坐標系。除了大地坐標系和地心大地直角坐標系外,導彈常用的坐標系還有很多,合理而恰當地選擇參考系統卻會使描述物體運動規律的數學模型大為簡化,否則將使問題復雜化,甚至陷入無法處理的困境。在研究物體和導彈運動特性和規律時,還必須將不同坐標系所描述的同一物理量統一到同一個坐標系中來進行,這就需要進行坐標系之間的轉換。由于各種坐標系的定義方法和適用范圍的不同,常常需要將導彈飛行狀態在各坐標系之間進行轉換,如何建立一種簡便、高效的坐標系轉換方法是導彈彈道設計時需要解決的一個關鍵問題。
一、常用坐標系
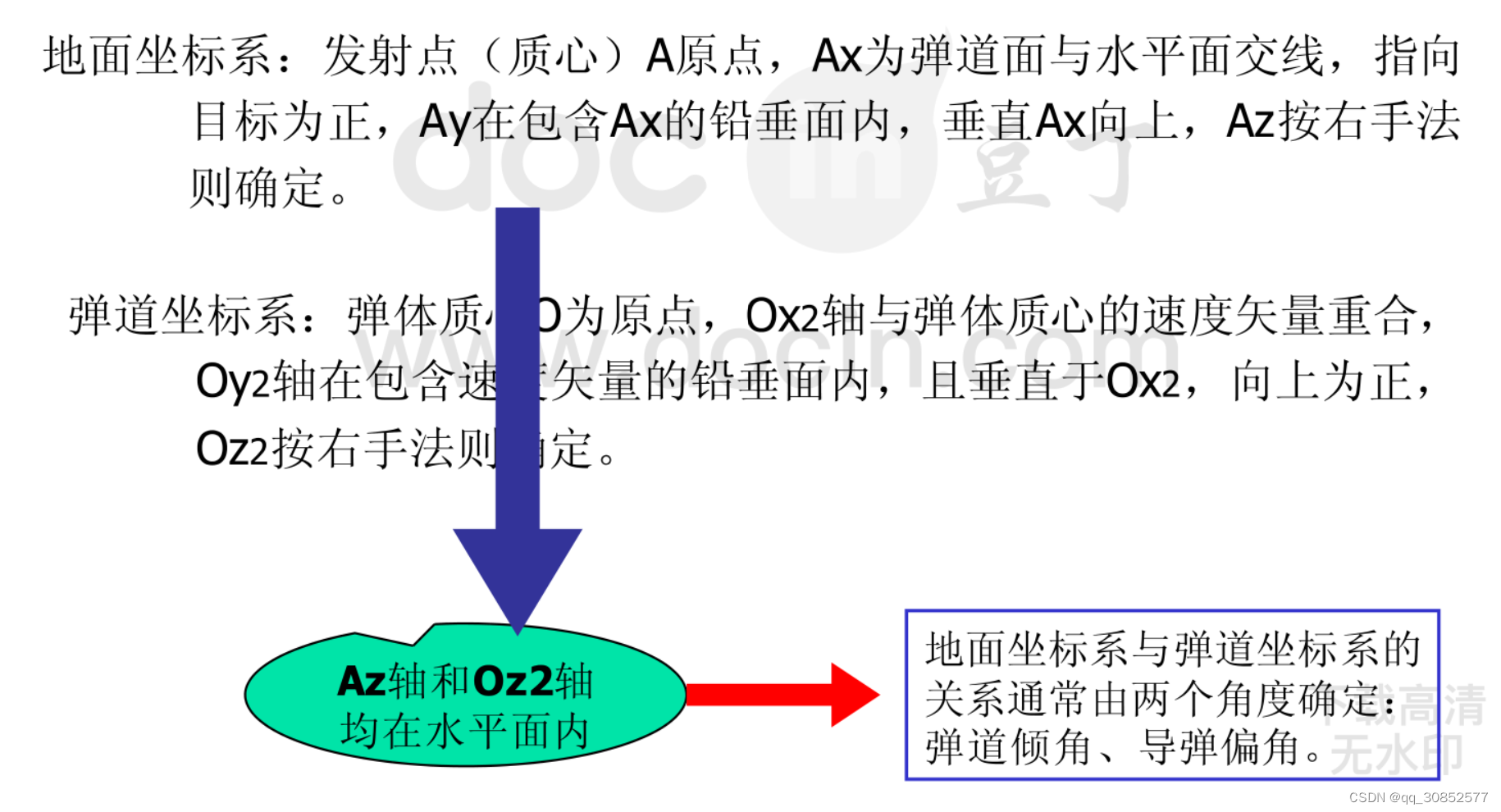
1.地面坐標系(發射坐標系)
O-X-Y-Z坐標系
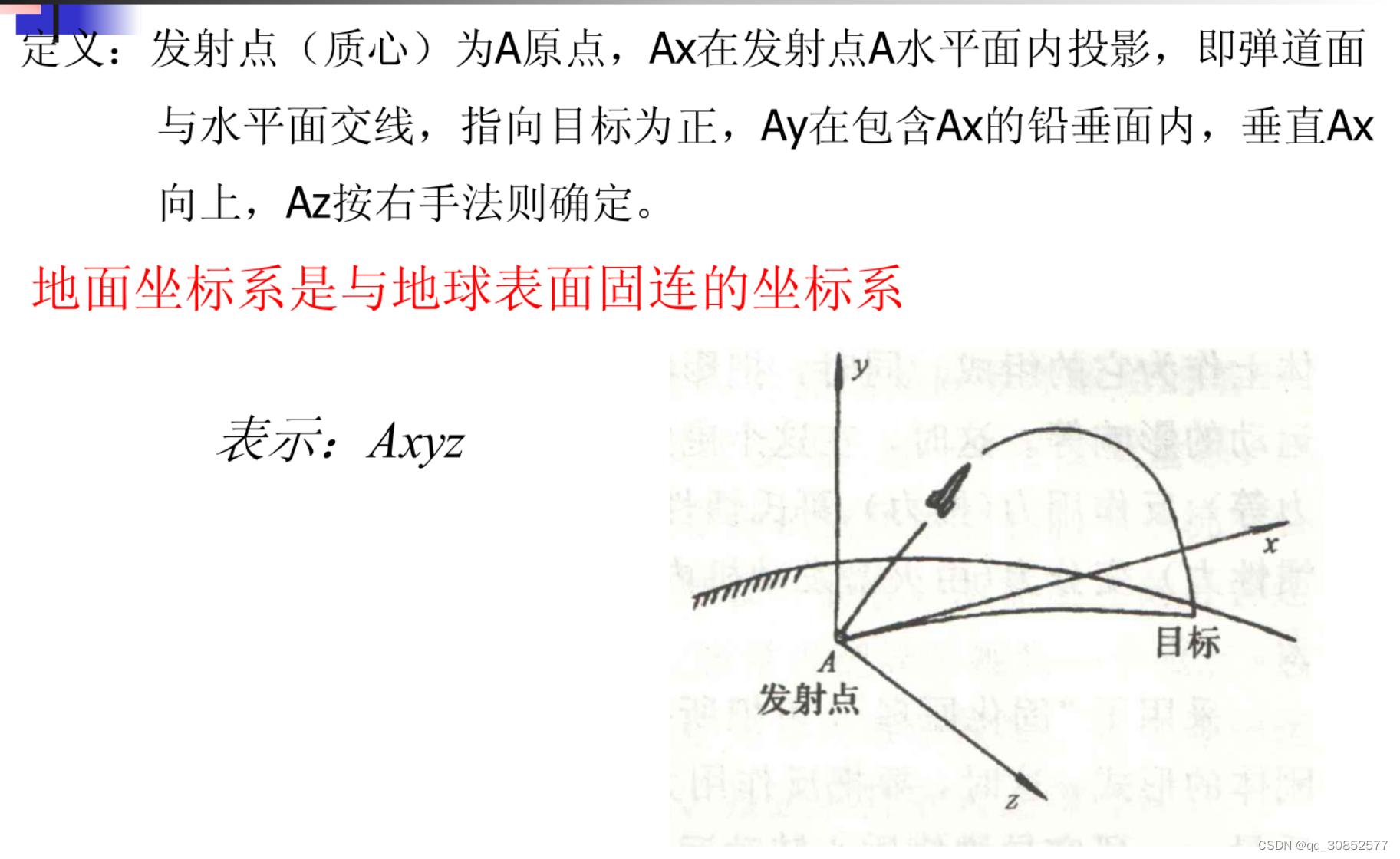
隨地球自轉而自轉,相對地面靜止。
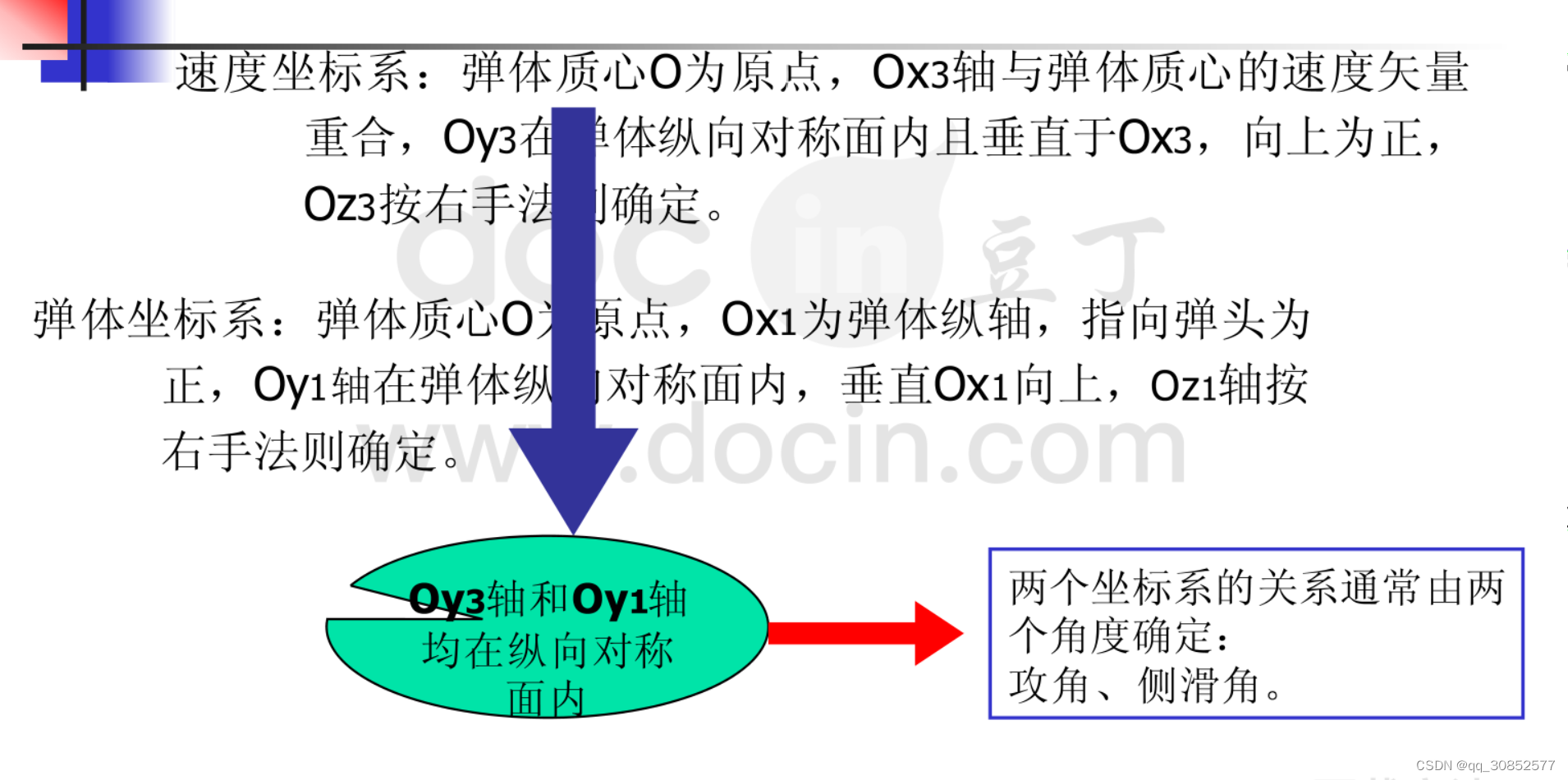
2.彈體坐標系

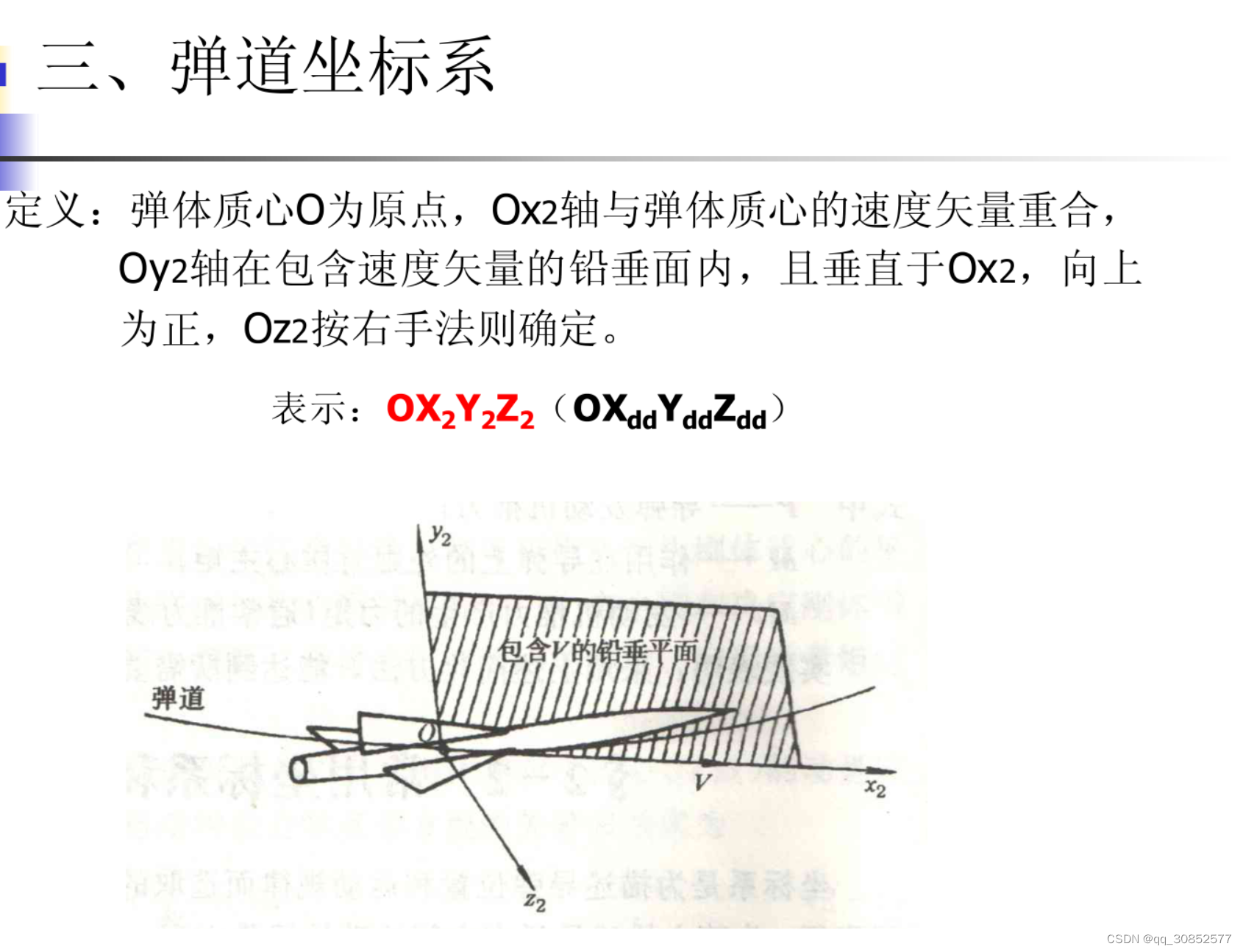
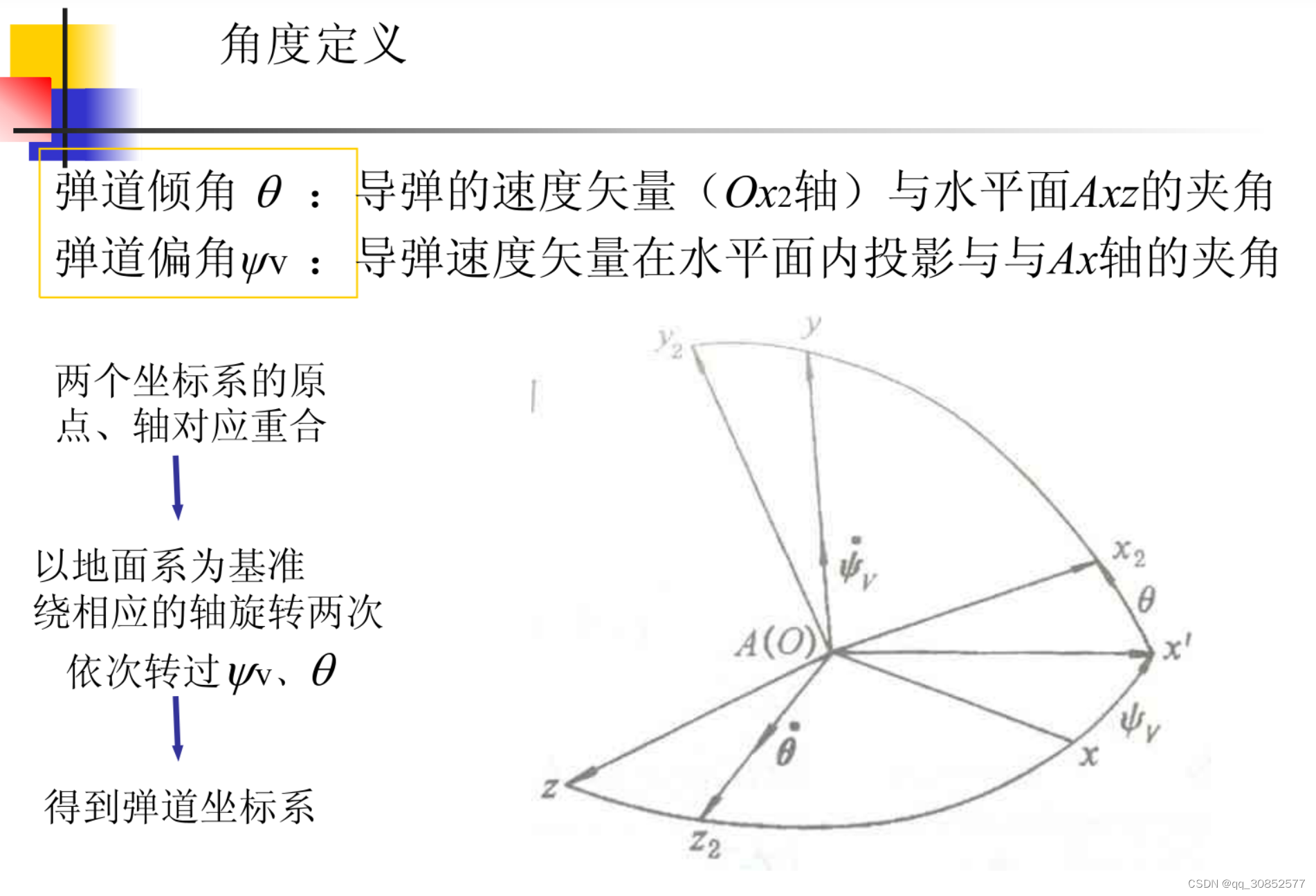
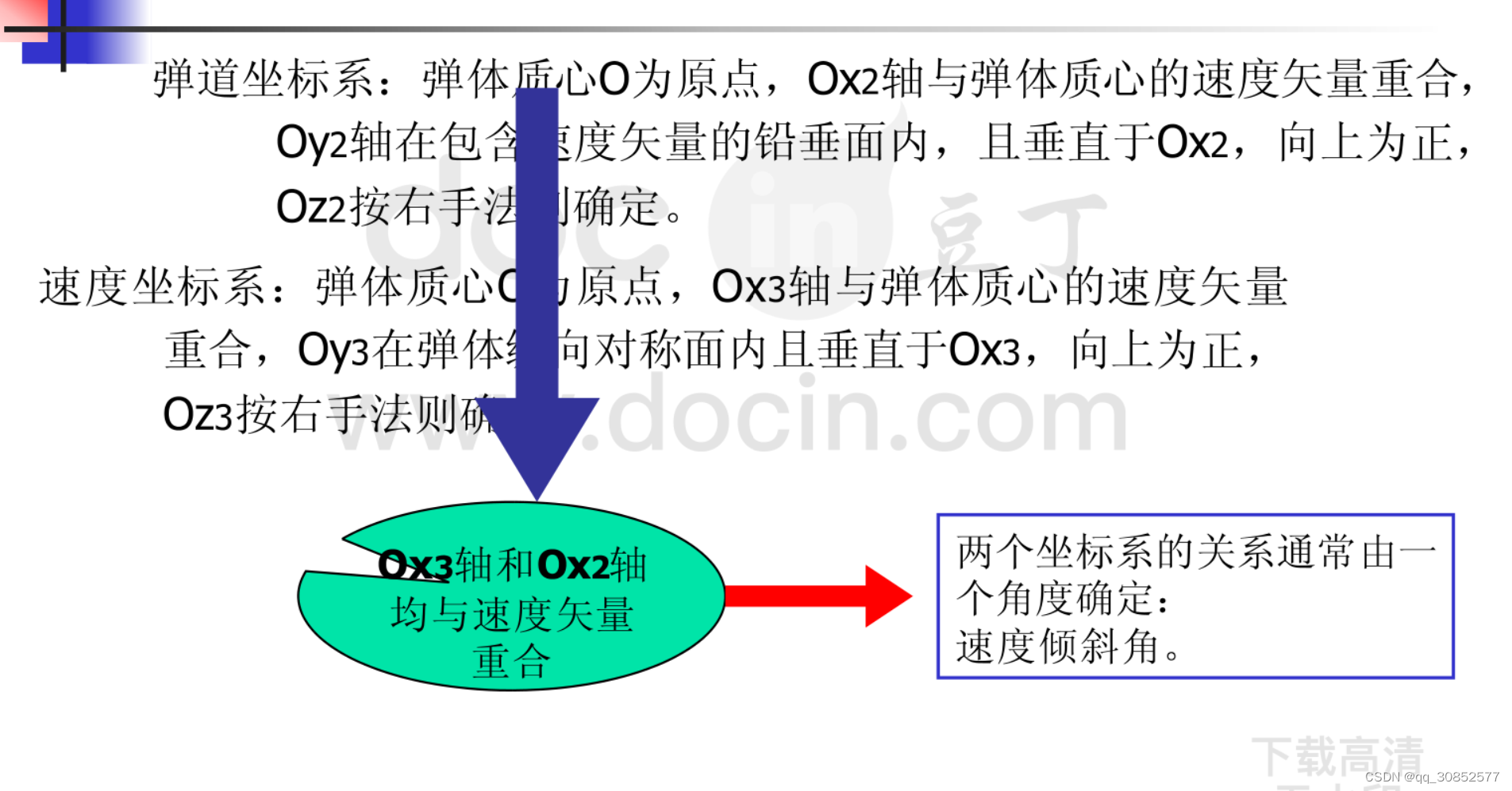
3.彈道坐標系
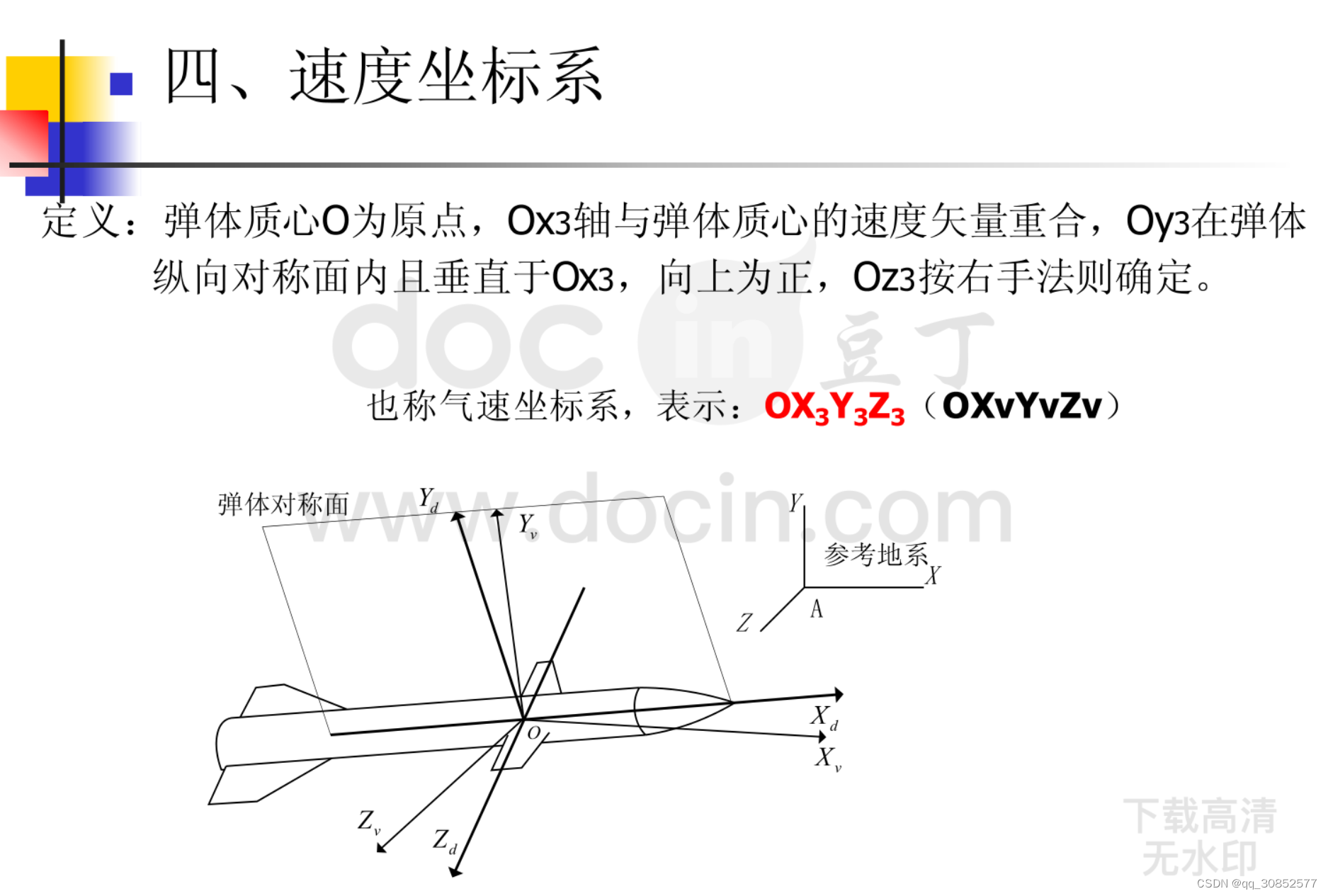
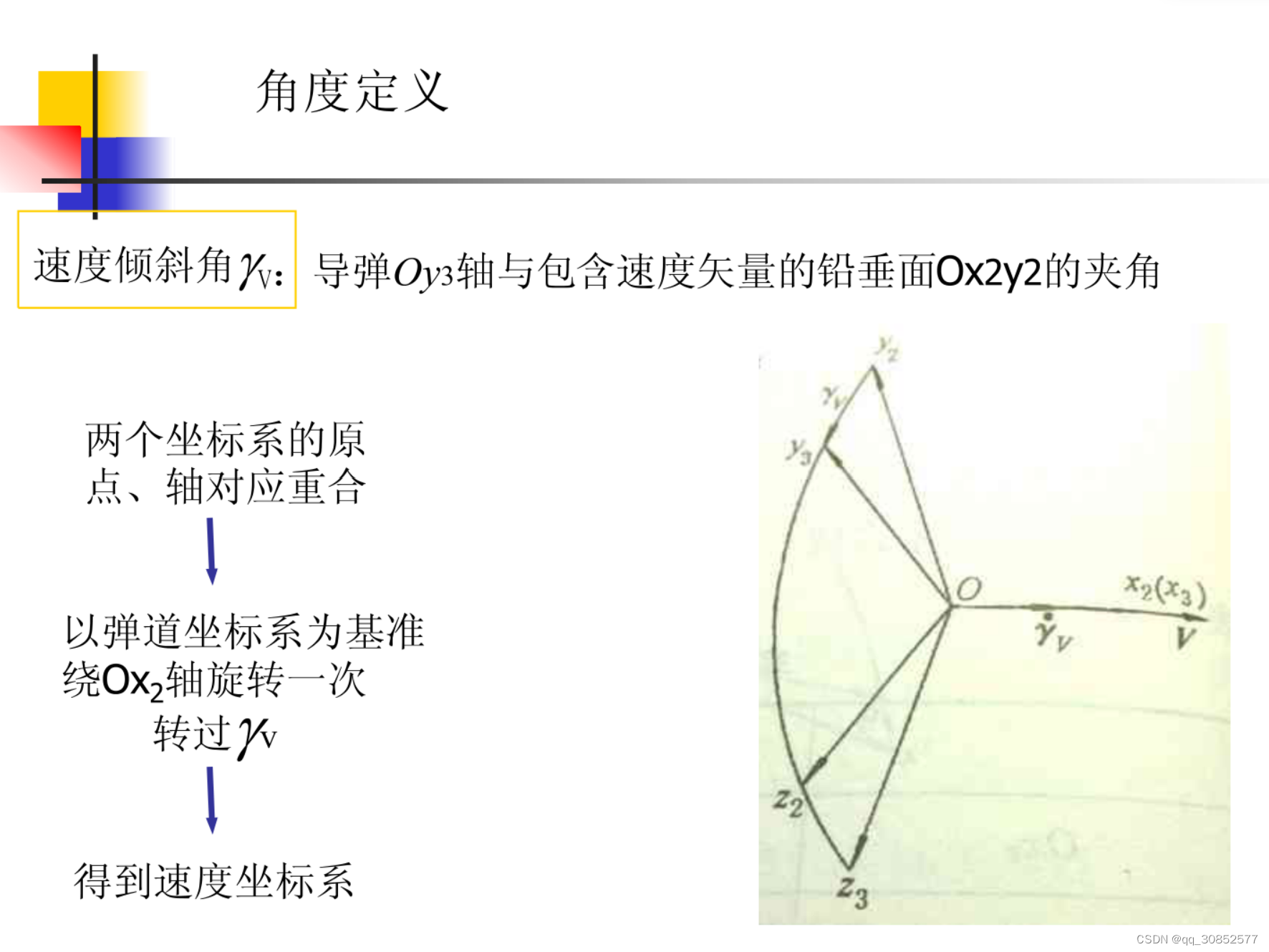
4.速度坐標系
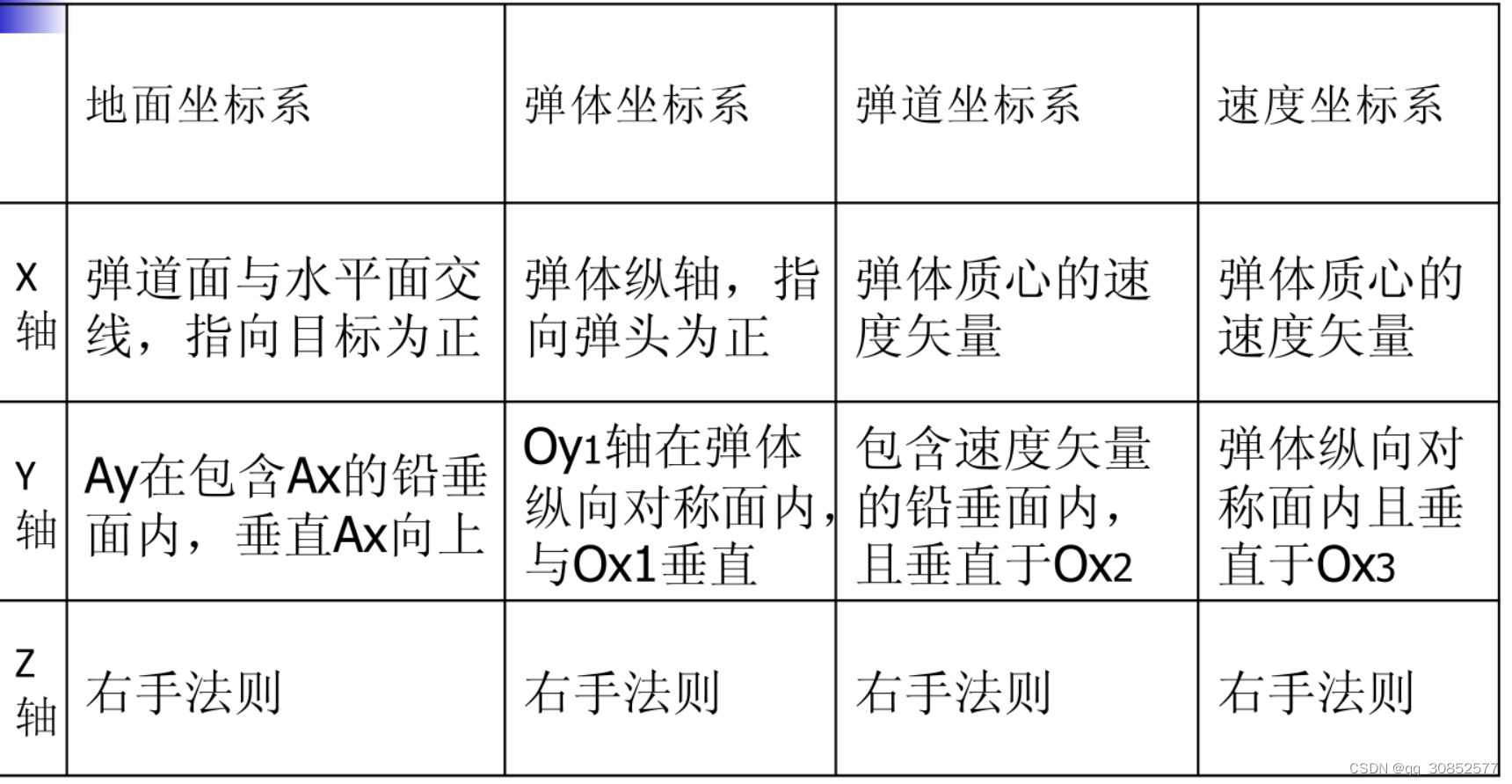
5.坐標系對比
二、坐標系轉換
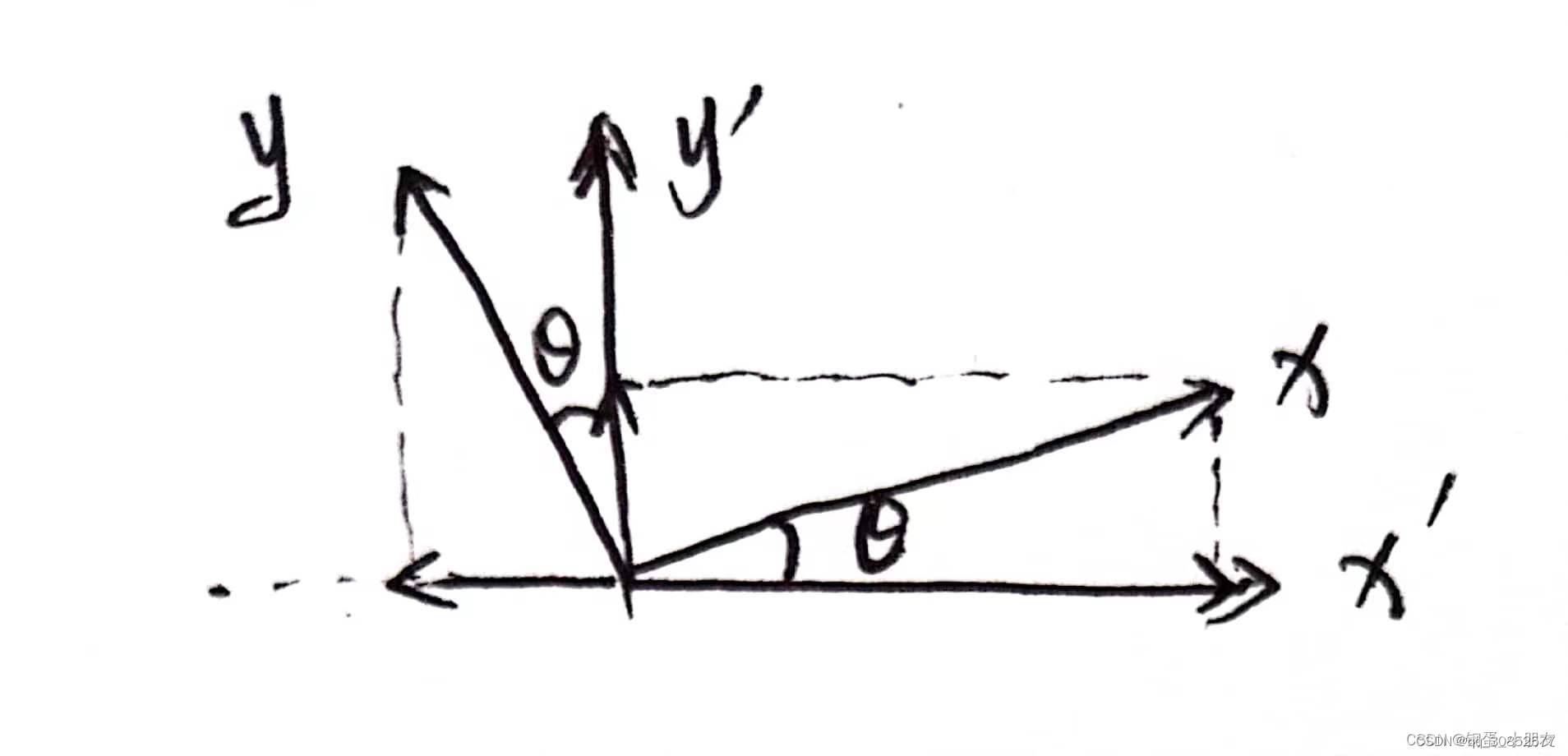
1.以2維坐標系變換為例:
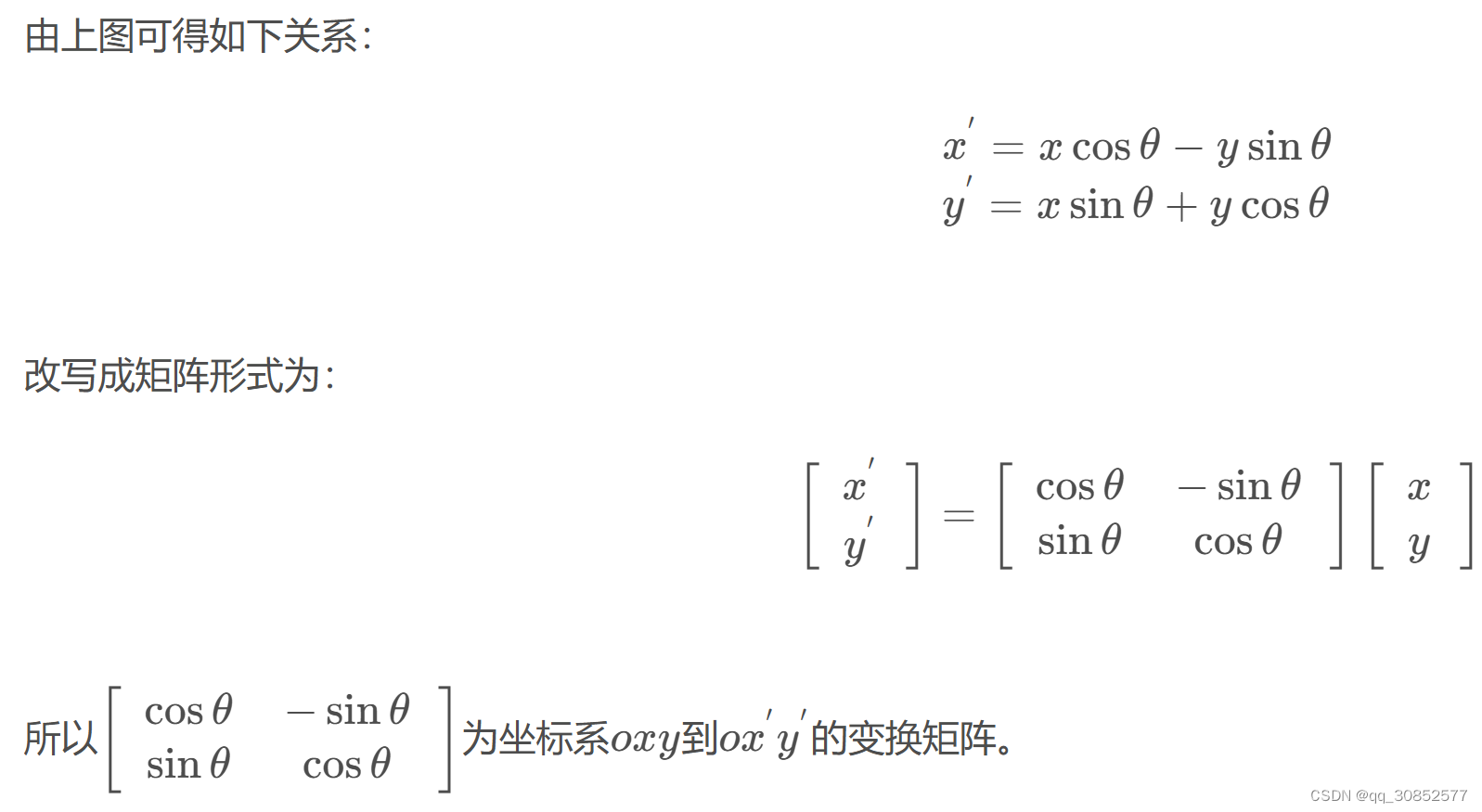
2.地面坐標系=>彈體坐標系
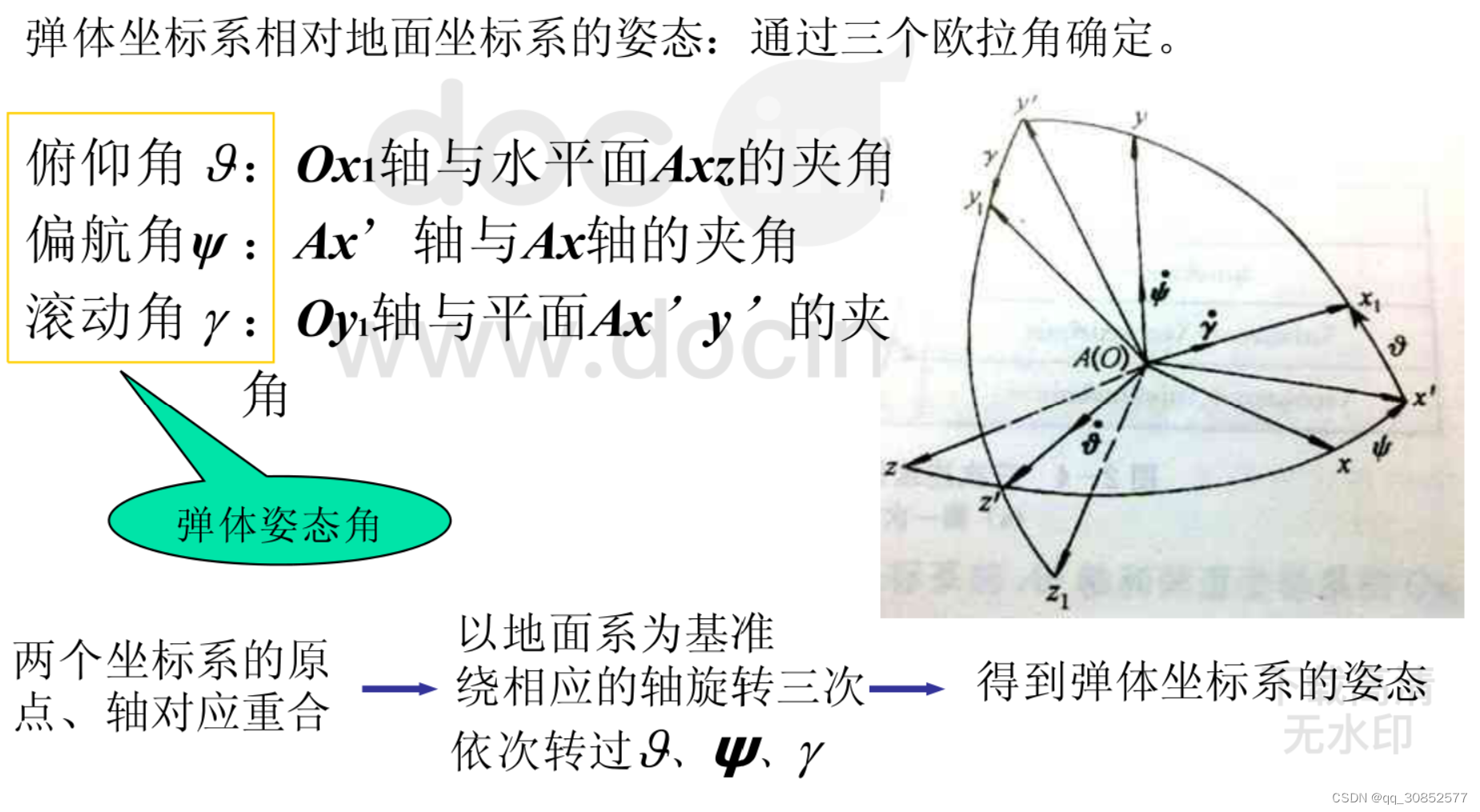
?(1)第一次旋轉
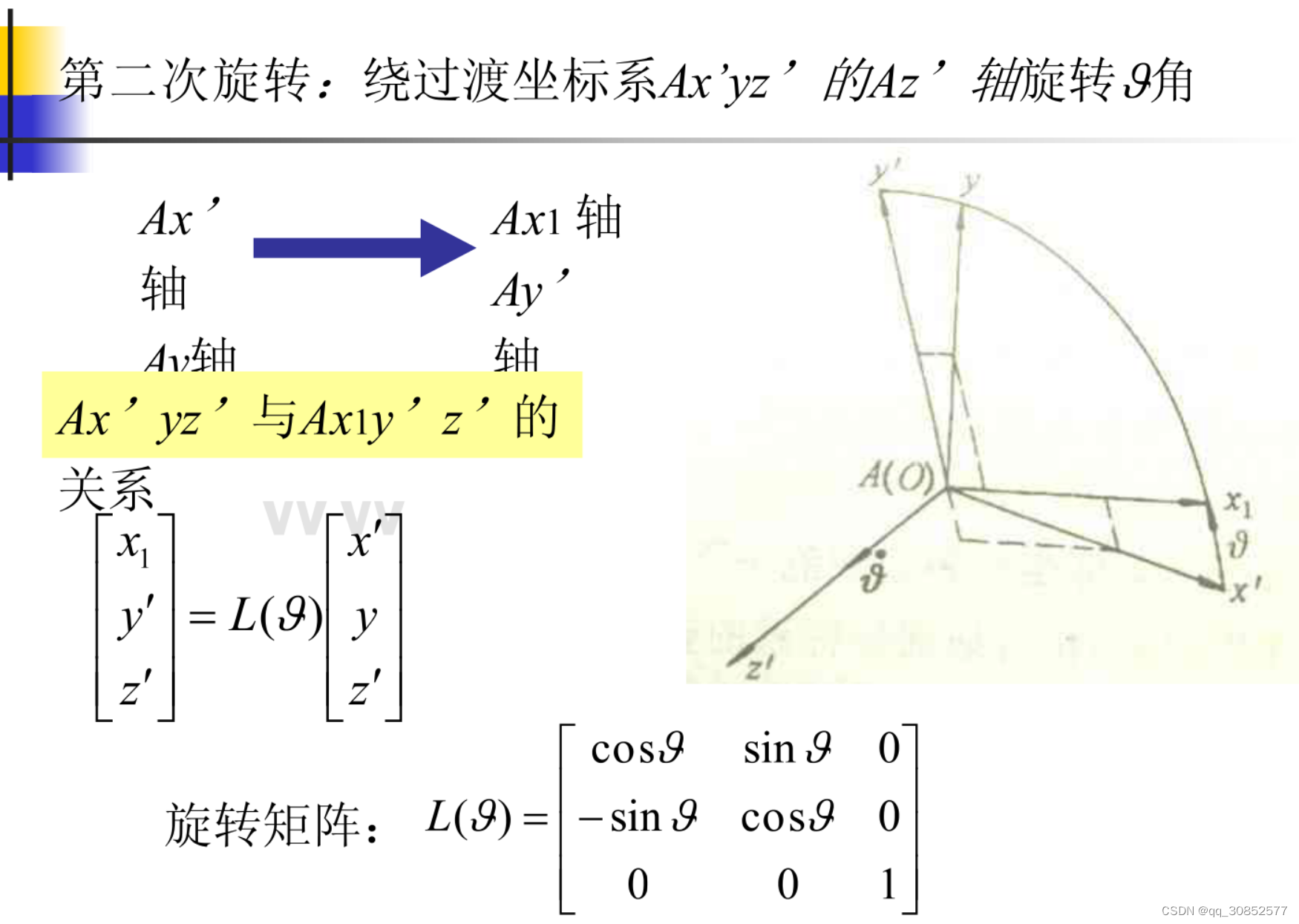
(2)第二次旋轉
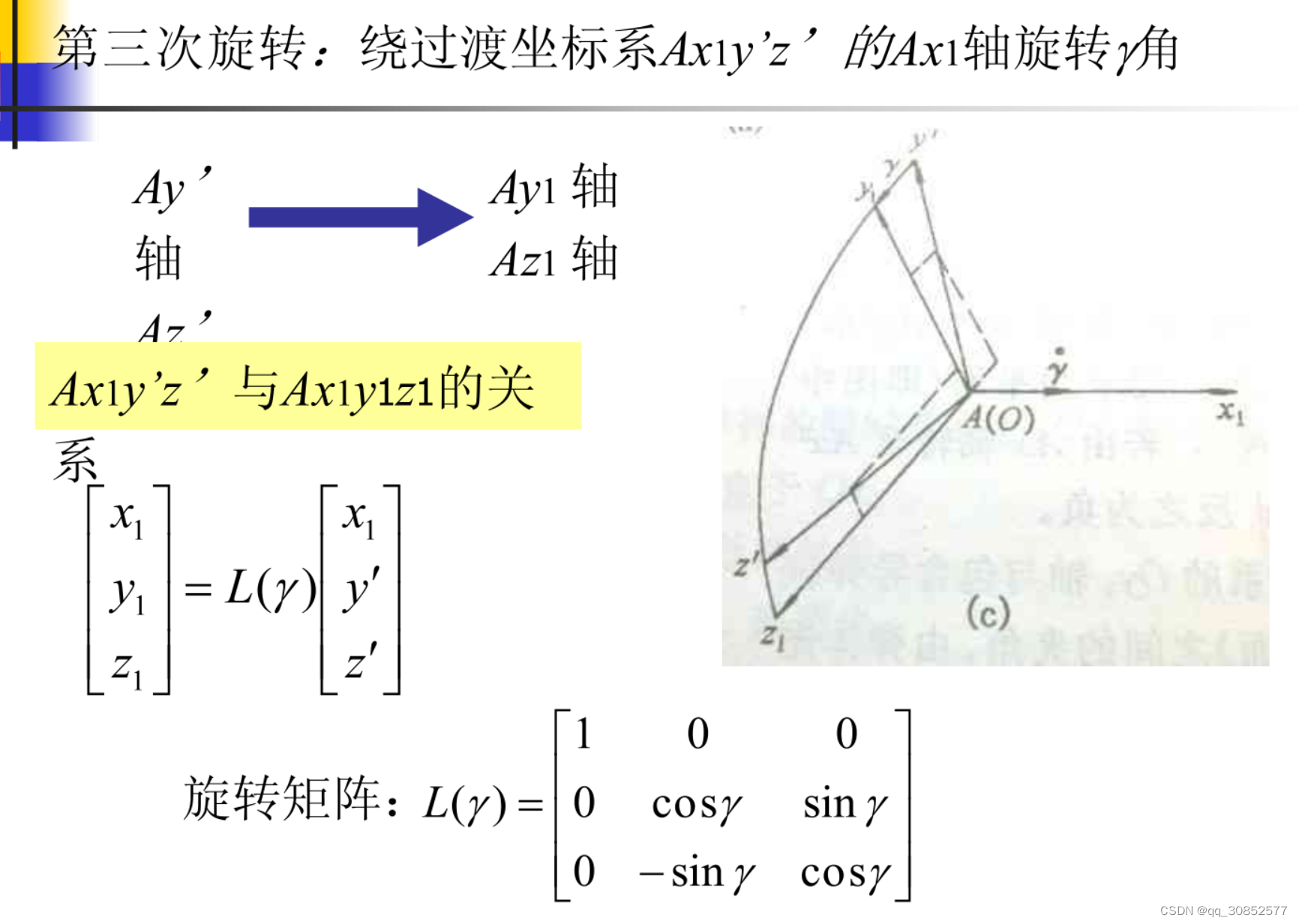
(3)第三次旋轉
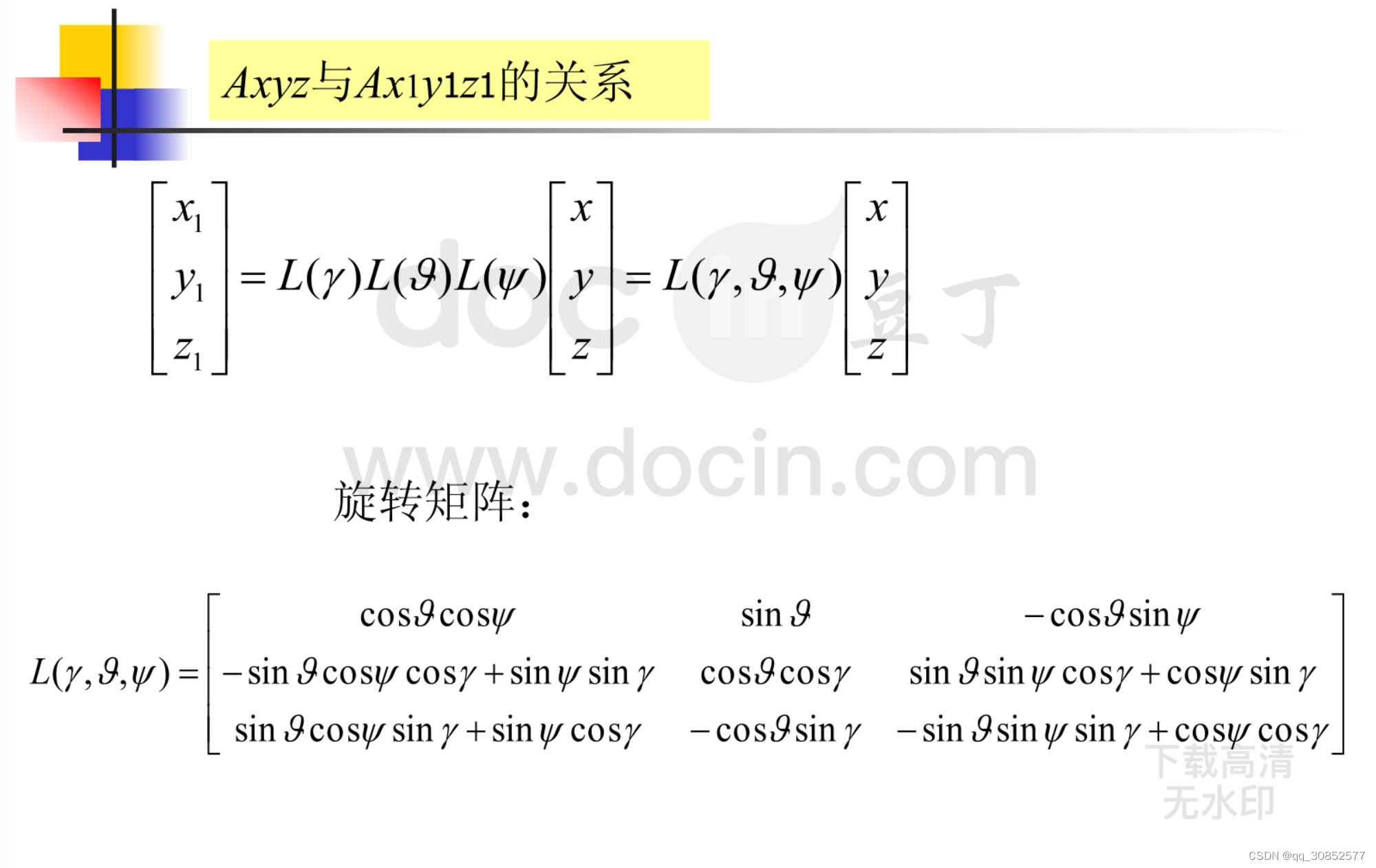
(4)轉換矩陣
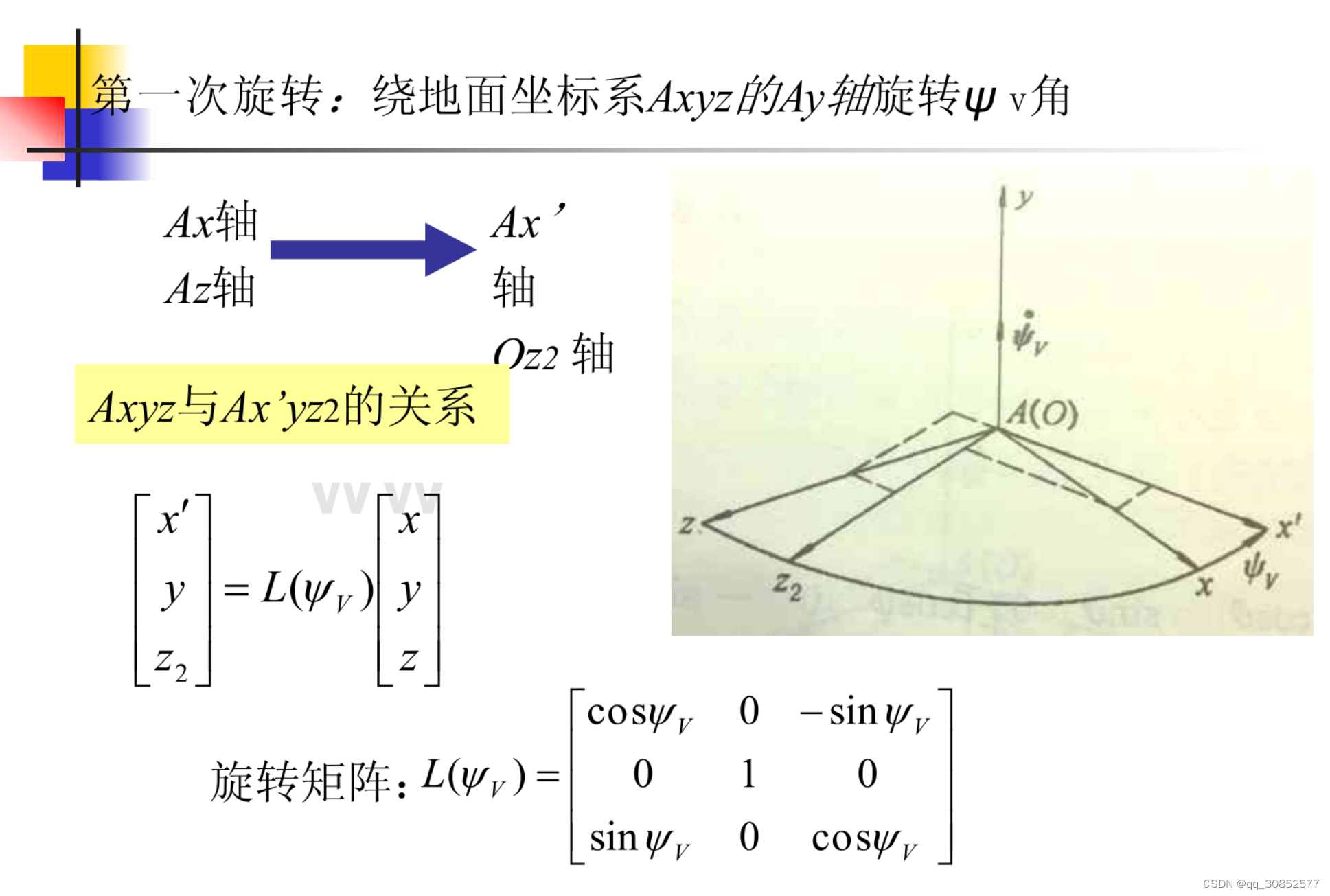
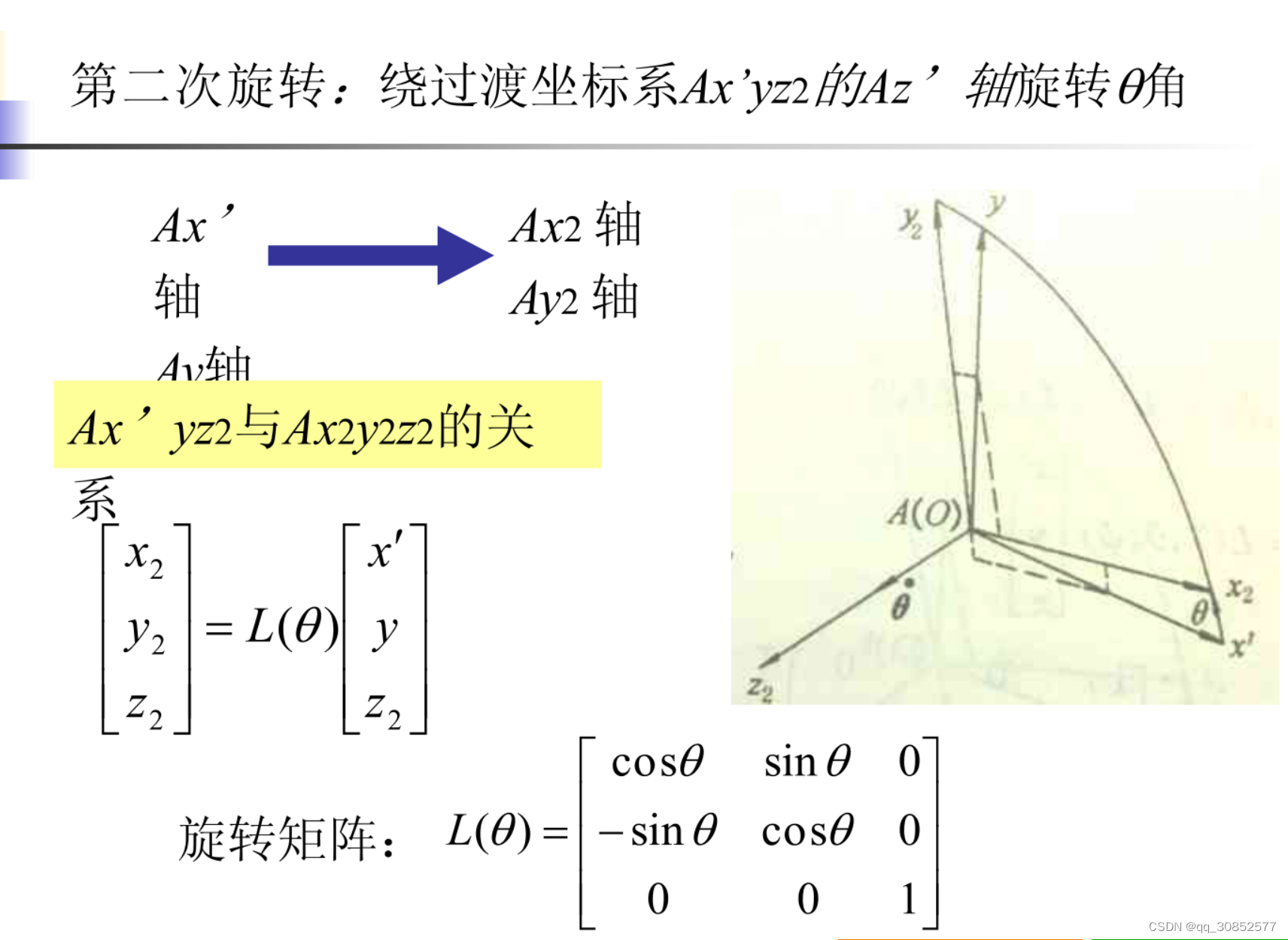
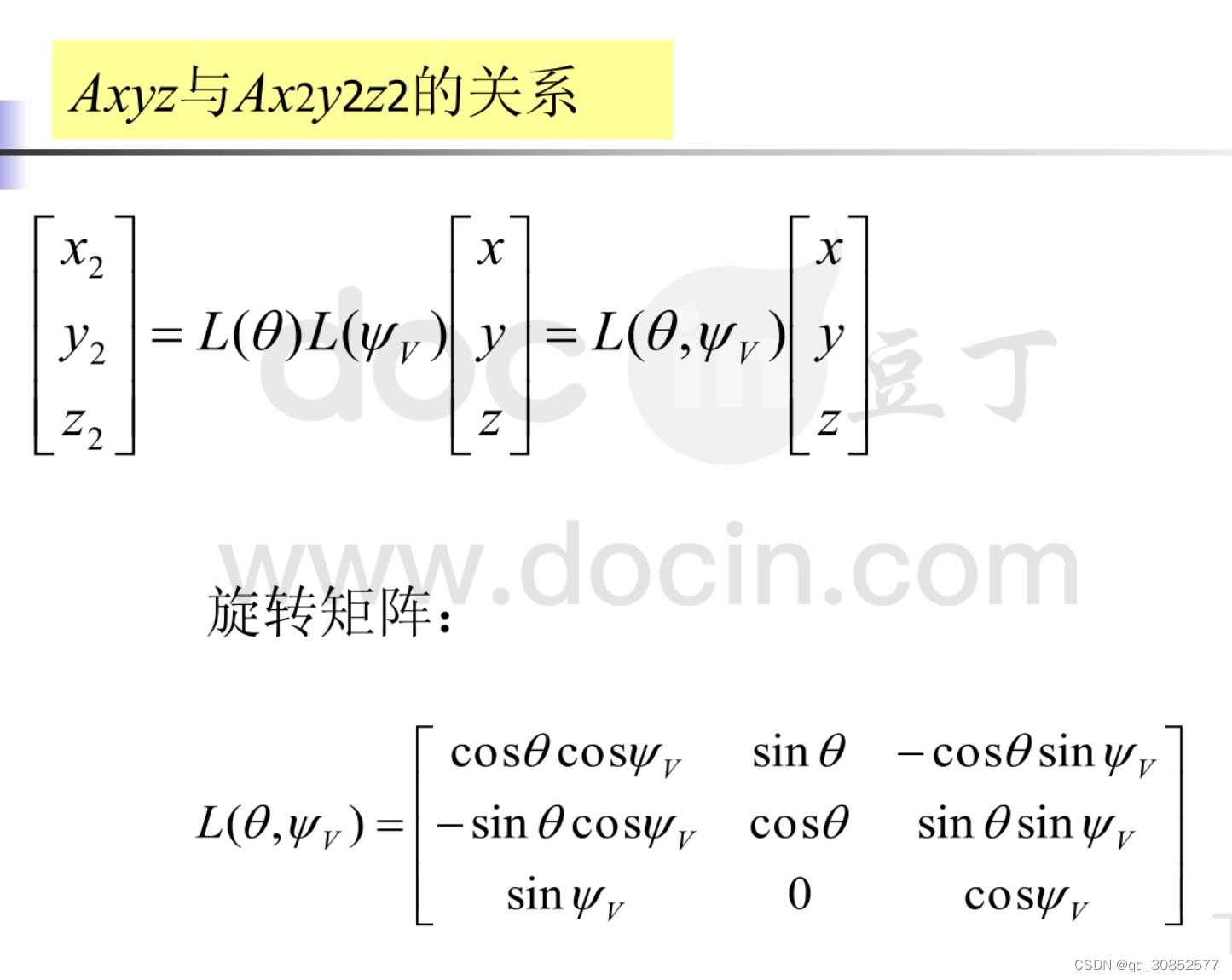
3.地面坐標系=>彈道坐標系
由于彈道坐標系與地面坐標系的z軸均在水平面內,因此只需要兩個角就可以進行坐標系變換。
(1)第一次旋轉
(2)第二次旋轉
(3)轉換矩陣
4.速度坐標系=>彈體坐標系
由于速度坐標系與彈體坐標系的y軸均在導彈對稱面內,因此只需要兩個角就可以進行坐標系變換。
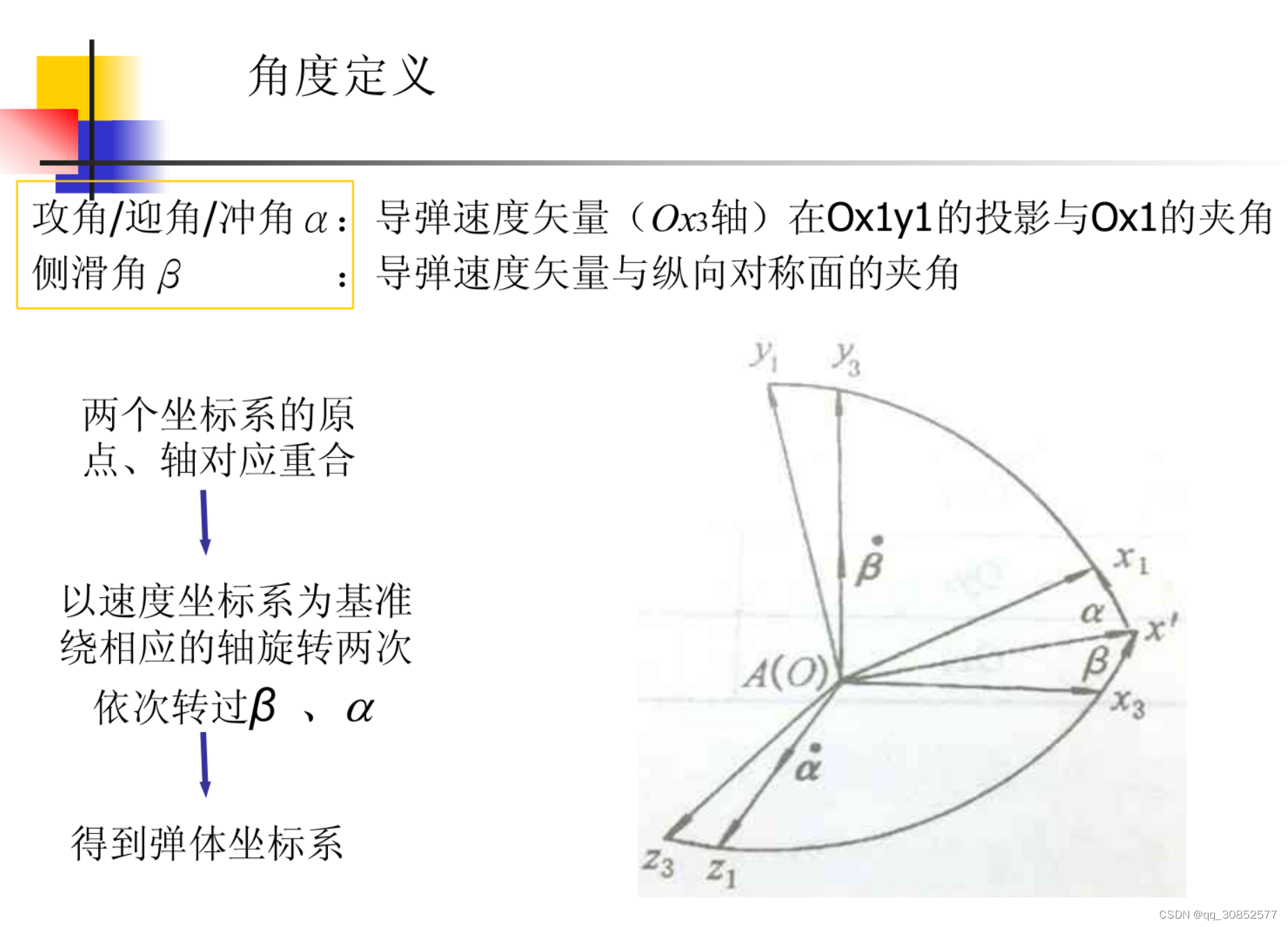
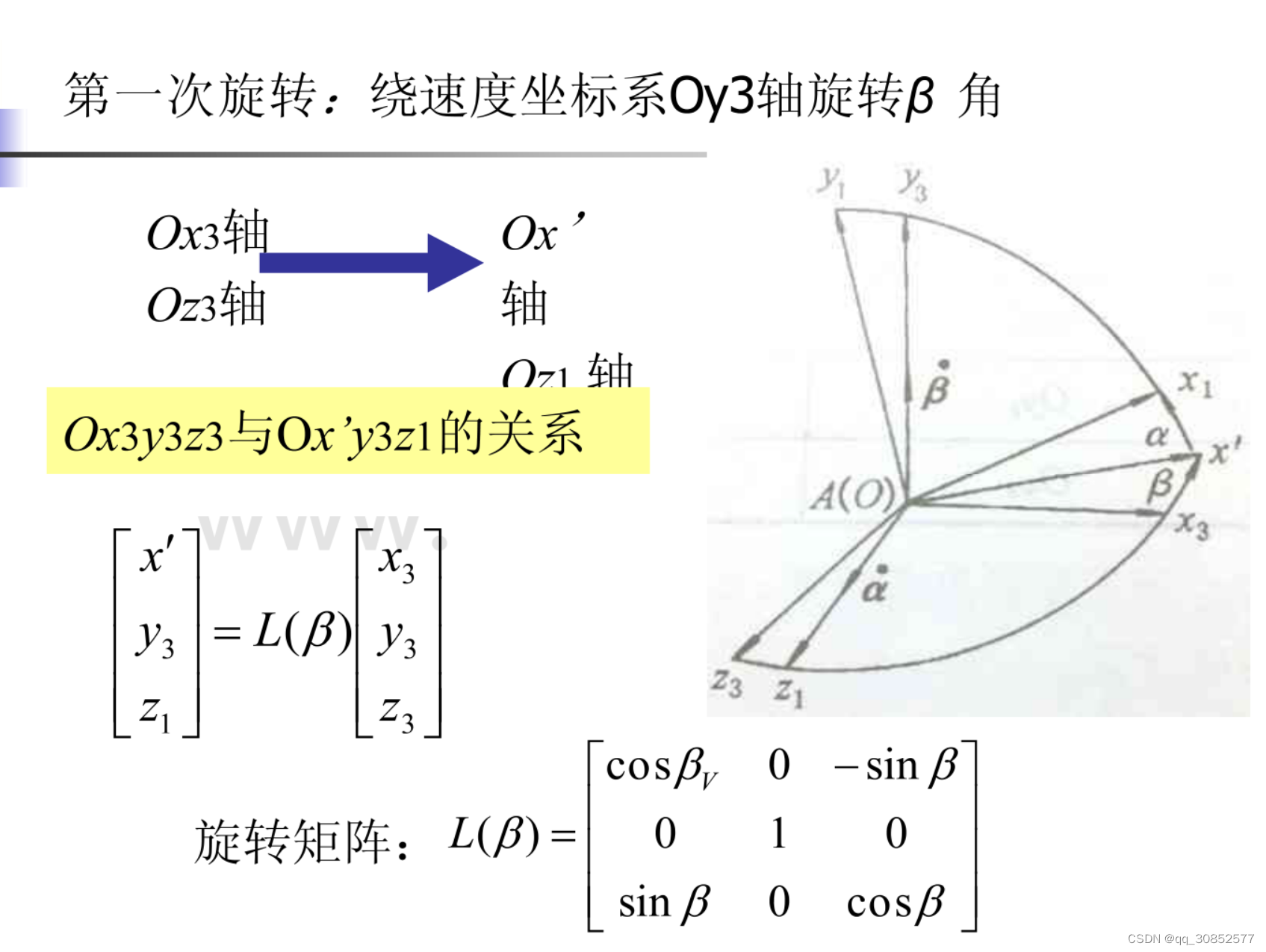
(1)第一次旋轉
(2)第二次旋轉
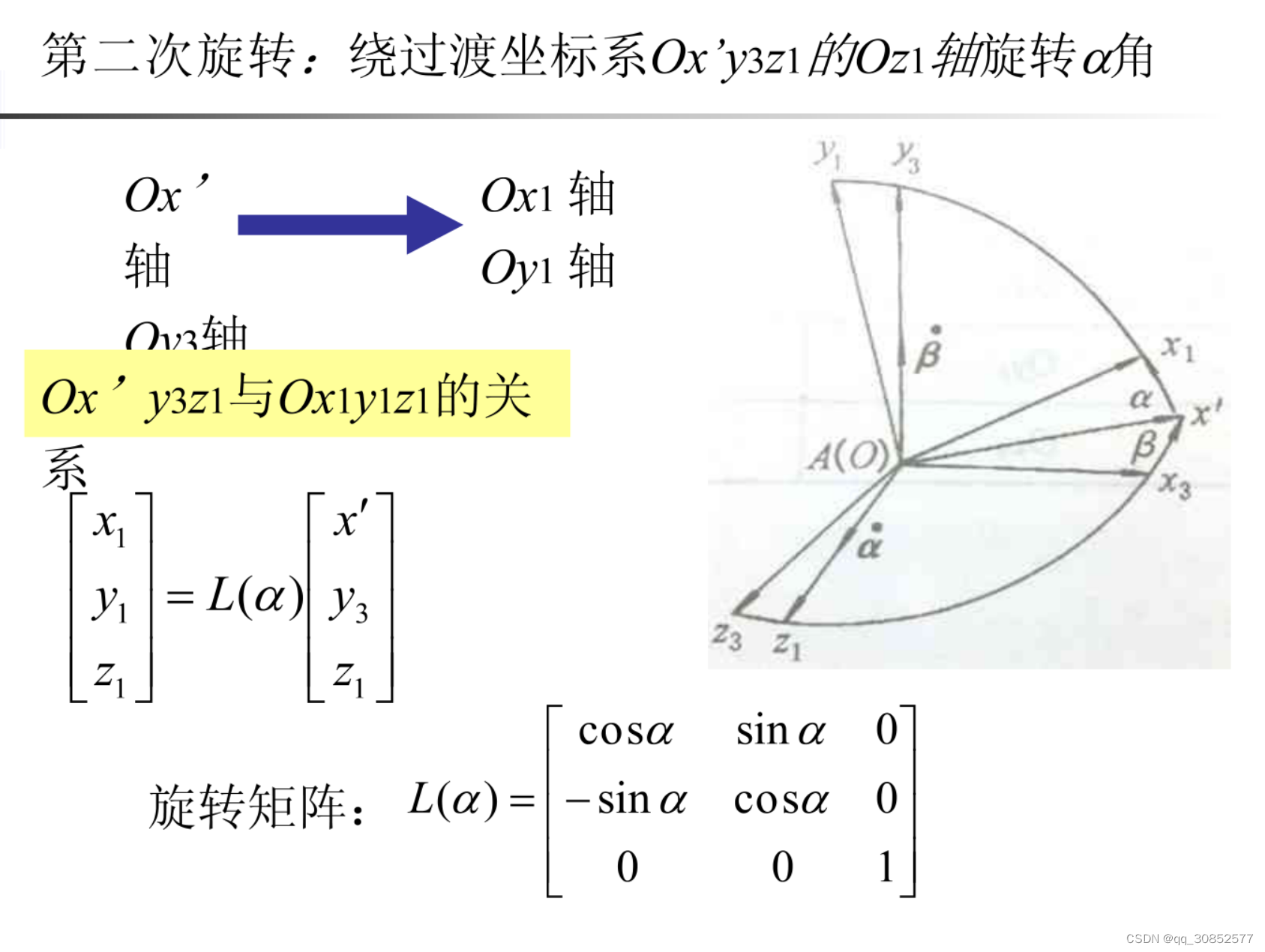
(3)旋轉矩陣
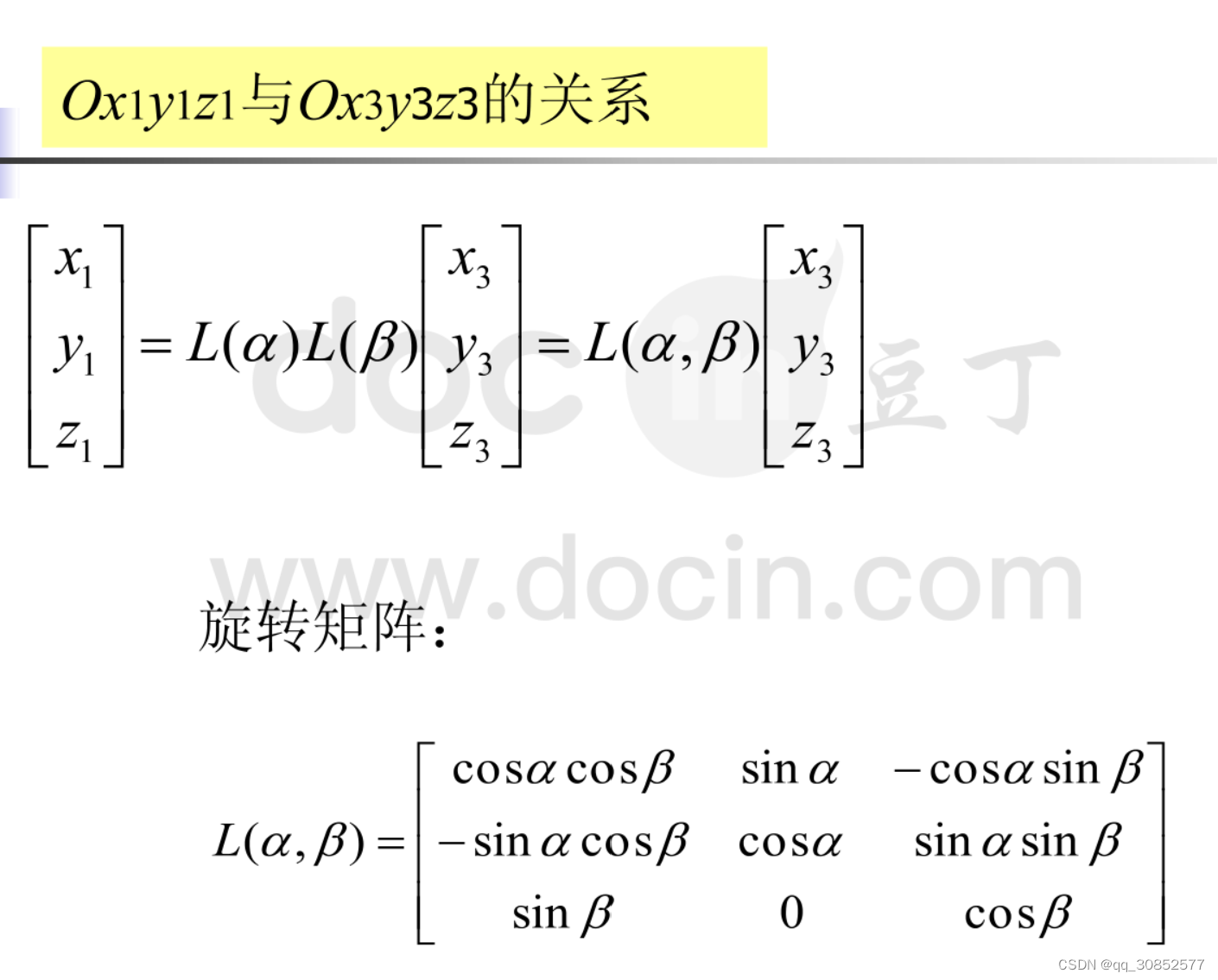
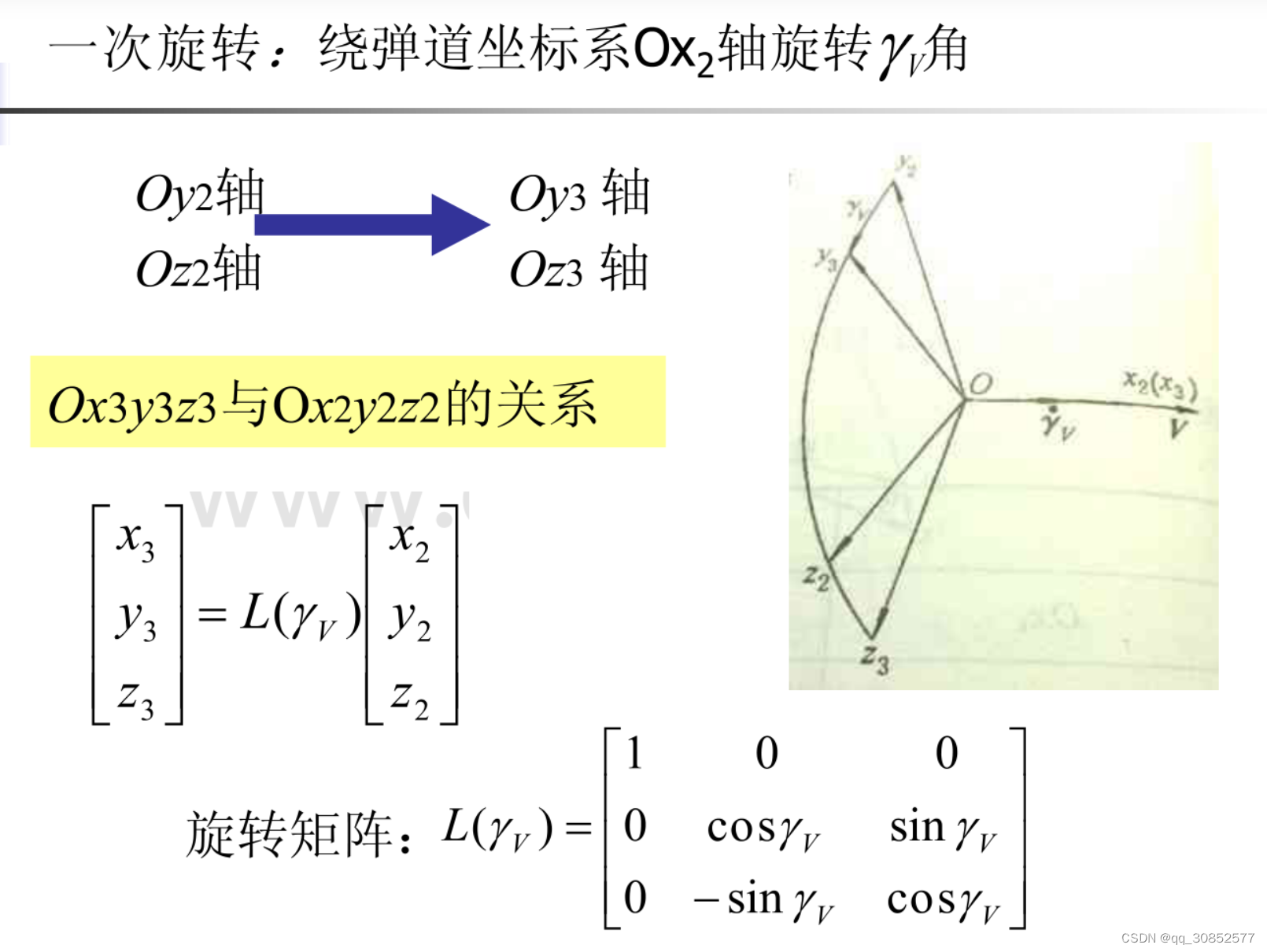
5.彈道坐標系=>速度坐標系
由于彈道坐標系和速度坐標系的x軸均與速度矢量重合,因此只需要一個角就可以完成坐標變換。
(1)一次旋轉
參考:【導彈四種坐標系及坐標系之間的變換】_彈道坐標系-CSDN博客
第三章_導彈研究中常用的坐標系 - 豆丁網 (docin.com)











)
)



)


