前言:
Dijkstra算法博客講解分為兩篇講解,這兩篇博客對所有有難點的問題都會講解,小白也能很好理解。看完這兩篇博客后保證收獲滿滿。
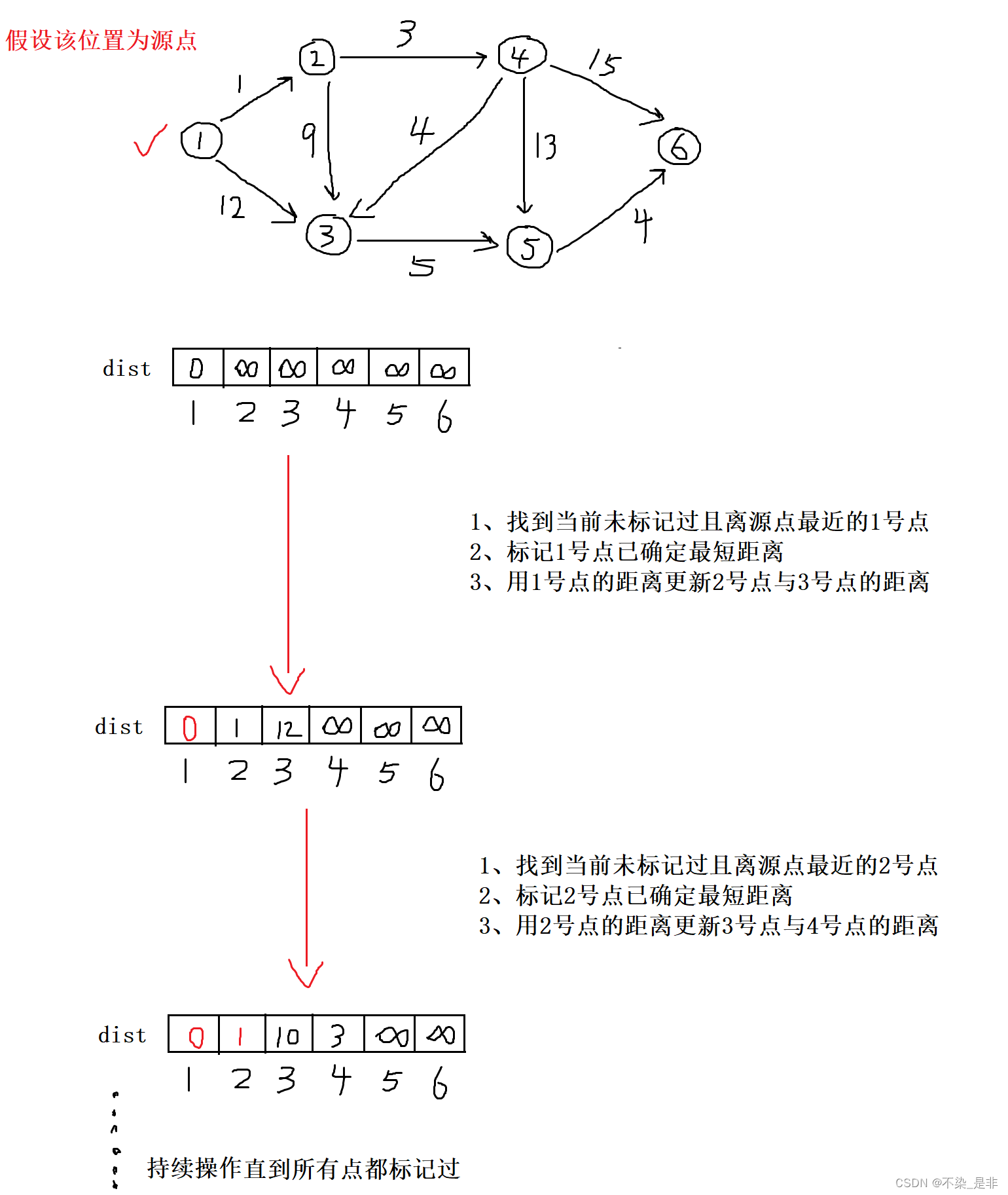
第一篇博客講解樸素Dijkstra算法Dijkstra求最短路篇一(全網最詳細講解兩種方法,適合小白)(python,其他語言也適用),本篇博客講解堆優化Dijkstra算法,兩中算法思路大體相同,但時間復雜度有所區別。
- 樸素Dijkstra算法:時間復雜度 O ( n 2 ) O(n^2) O(n2)
- 堆優化Dijkstra算法:時間復雜度 O ( m l o g n ) O(mlogn) O(mlogn)
兩篇博客給出的題目內容一樣,只有數據規模不一樣。
題目:
題目鏈接:
850. Dijkstra求最短路 II
給定一個 n 個點 m 條邊的有向圖,圖中可能存在重邊和自環,所有邊權均為非負值。請你求出 1 號點到 n 號點的最短距離,如果無法從 1 號點走到 n 號點,則輸出 ?1。
輸入格式
第一行包含整數 n 和 m。
接下來 m 行每行包含三個整數 x,y,z,表示存在一條從點 x 到點 y 的有向邊,邊長為 z。
輸出格式
輸出一個整數,表示 1 號點到 n 號點的最短距離。
如果路徑不存在,則輸出 ?1。
數據范圍(兩題不同處)
1 ≤ n , m ≤ 1.5 × 1 0 5 1≤n,m≤1.5×10^5 1≤n,m≤1.5×105,
圖中涉及邊長均不小于 0,且不超過 10000。
數據保證:如果最短路存在,則最短路的長度不超過 1 0 9 10^9 109。
輸入樣例:
3 3
1 2 2
2 3 1
1 3 4
輸出樣例:
3
思路:
算法分析:
依舊是Dijkstra算法求解,不同的是本題需要降低時間復雜度。
對樸素Dijkstra算法時間復雜度分析可知:
- 尋找路徑最短的點: O ( n 2 ) O(n^2) O(n2)
- 加入集合S: O ( n ) O(n) O(n)
- 更新距離: O ( m ) O(m) O(m)
- 所以總的時間復雜度為 O ( n 2 ) O(n^2) O(n2)
所以我們需要對尋找路徑最短的點進行改變,如何降低找最短距離的點的時間復雜度呢?
這里可以使用最小堆進行優化(也就是優先隊列),對優先隊列不太熟悉的可以看看優先隊列這篇博客,其他博主寫的很詳細這里我就不介紹了。
進行優化后時間復雜度分析如下:
- 尋找路徑最短的點: O ( n ) O(n) O(n)
- 加入集合S: O ( n ) O(n) O(n)
- 更新距離: O ( m l o g n ) O(mlogn) O(mlogn)
堆的數據結構大家接觸的可能有點少,python中有專門的庫函數可以直接使用,其他語言也有類似的庫函數可以使用。
構造鄰接表:
首先對數據進行存儲,圖的存儲有兩種方式,一種是鄰接表,一種是鄰接矩陣。題目中的數據規模用鄰接表存儲(本題數據規模是稀疏圖)。
為什么要用鄰接表去存貯,而不是鄰接矩陣?
我們采用鄰接矩陣還是采用鄰接表來表示圖,需要判斷一個圖是稀疏圖還是稠密圖。稠密圖指的是邊的條數|E|接近于|V|2,稀疏圖是指邊的條數|E|遠小于于|V|2(數量級差很多)。本題是稠密圖,顯然稠密圖用鄰接矩陣存儲比較節省空間,反之用鄰接表存儲。
鄰接表存儲就不需要注意重邊和自環了,因為算法會自動算出最優解
鄰接矩陣存儲代碼如下:
n, m = map(int, input().split()) # 圖的節點個數和邊數
# 構建鄰接表
num = [[] for i in range(n + 1)]
for _ in range(m):a, b, c = map(int, input().split())num[a].append((b, c)) # 無需考慮重邊和自環
以題目實例為例,打印num數組
[[], [(2, 2), (3, 4)], [(3, 1)], []]
鄰接表構建完成之后就要進行Dijkstra算法,這里直接給出代碼,用詳細代碼給大家進行講解。整體思路跟樸素Dijkstra算法大致相同
代碼及詳細注釋:
import heapqn, m = map(int, input().split()) # 圖的節點個數和邊數
# 構建鄰接表
num = [[] for i in range(n + 1)]
for _ in range(m):a, b, c = map(int, input().split())num[a].append((b, c)) # 無需考慮重邊和自環
dist = [float("inf") for _ in range(n + 1)] # float("inf")在python中是無限大的意思
dist[1] = 0 # 源點到源點的距離為置為 0
state = [False for i in range(n + 1)] # state 用于記錄該點的最短距離是否已經確定def dijstra():# 這里heap中為什么要存兩個值呢,首先小根堆是根據距離來排的,所以有一個變量要是距離,# 其次在從堆中拿出來的時候要知道知道這個點是哪個點,不然怎么更新鄰接點呢?所以第二個變量要存點。heap = [(0, 1)] # 首先放入距離0和點1,這個順序不能倒,這里顯然要根據距離排序while heap:distance, i = heapq.heappop(heap) # 這里是取出最下距離和對應的點,最小堆自動取出最小值if state[i]: # 如果該點最短距離已經確定,跳過下面操作continuestate[i] = True # 標記該點距離確定for j, d in num[i]: # 循環遍歷找點i所能到的點和其距離if dist[j] > distance + d: # 如果原本點j到源點的距離大于后續計算出來的值dist[j] = distance + d # 更新heapq.heappush(heap, (dist[j], j)) # 該點距離和點加入到最小堆中# 判斷最后一個點的最短距離是否找到,如果為無窮大,則表示未找到,返回-1,否則返回最短距離dist[-1]if dist[n] == float("inf"):return -1else:return dist[n]print(dijstra())樸素Dijkstra算法大家理解好了本算法也很好理解,操作都是一樣,只是在尋找路徑最短的點時用了最小堆操作。這里就不拿實例帶大家過了,如果略微有點懵,大家可以自己拿實例數據過一遍。
本題主要對 Python 中的 heapq 庫進行簡略講解。
import heapqheap = []
heapq.heappush(heap, (1, 2))
heapq.heappush(heap, (1, 3))
heapq.heappush(heap, (2, 1))
heapq.heappush(heap, (2, 0))
heapq.heappush(heap, (0, 2))
heapq.heappush(heap, (0, 0))print("初始狀態", heap)
print("刪除的元素", heapq.heappop(heap))
print("刪除后狀態", heap)運行結果:
初始狀態 [(0, 0), (1, 2), (0, 2), (2, 0), (1, 3), (2, 1)]
刪除的元素 (0, 0)
刪除后狀態 [(0, 2), (1, 2), (2, 1), (2, 0), (1, 3)]
- heapq.heappush((heap, (1, 2)):把元素(1,2)加入到堆 heap中(每次加入后都是最小堆的構建形式)。
- heapq.heappop(heap):彈出堆頂元素(最小堆的堆頂就是最小元素)。
總結:
堆優化版dijkstra適合稀疏圖
思路:
堆優化版的dijkstra是對樸素版dijkstra進行了優化,在樸素版dijkstra中時間復雜度最高的尋找距離
最短的點O(n^2)可以使用最小堆優化。
- 一號點的距離初始化為零,其他點初始化成無窮大。
- 將一號點放入堆中。
- 不斷循環,直到堆空。每一次循環中執行的操作為:
彈出堆頂(與樸素版diijkstra找到S外距離最短的點相同,并標記該點的最短路徑已經確定)。
用該點更新臨界點的距離,若更新成功就加入到堆中。
時間復雜度分析
- 尋找路徑最短的點: O ( n ) O(n) O(n)
- 加入集合S: O ( n ) O(n) O(n)
- 更新距離: O ( m l o g n ) O(mlogn) O(mlogn)

章節——謝希仁版本、期末復習自用)


)









)




