文章目錄
- 前言
- 一、修改機架sdf文件
- 二、安裝yolo
- 三、運行
前言
ubuntu20.04
PX4 1.13.3
已配置好PX4 ROS gazebo環境
一、修改機架sdf文件
將雙目相機加到仿真的iris機架上
修改下圖文件
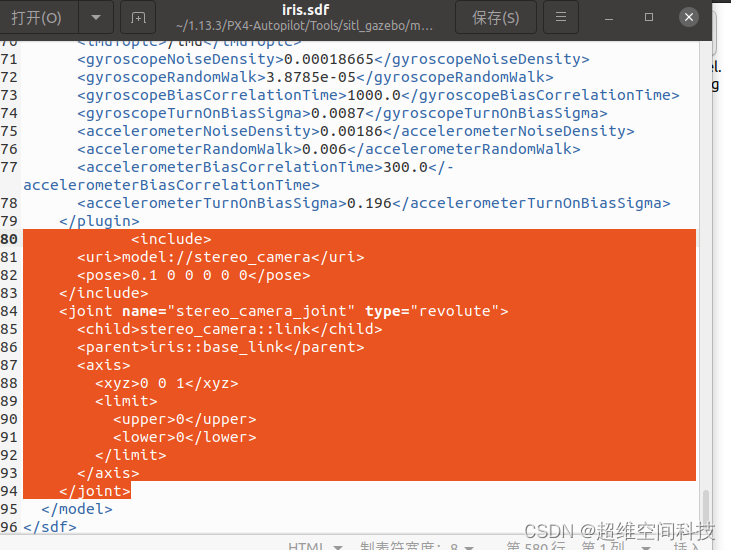
添加如下:
<include><uri>model://stereo_camera</uri><pose>0.1 0 0 0 0 0</pose>
</include>
<joint name="stereo_camera_joint" type="revolute"><child>stereo_camera::link</child><parent>iris::base_link</parent><axis><xyz>0 0 1</xyz><limit><upper>0</upper><lower>0</lower></limit></axis>
</joint>
然后在~/1.13.3/PX4-Autopilot執行
make px4_sitl_default gazebo
編譯完運行
roslaunch px4 mavros_posix_sitl.launch
然后運行
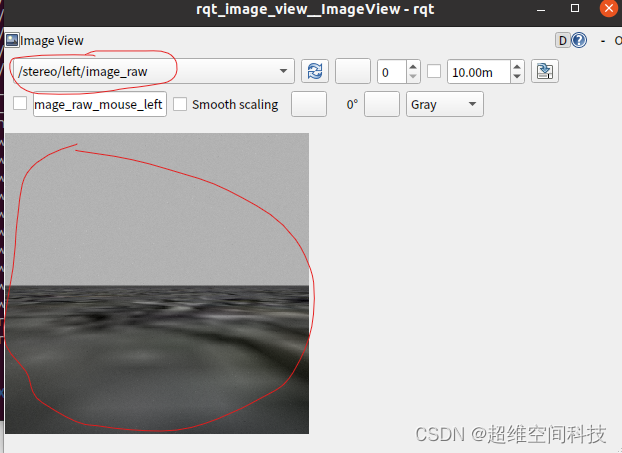
rqt_image_view
選擇下圖話題,可以看到gazebo的環境,說明添加正常
二、安裝yolo
cd catkin_workspace/src
git clone --recursive git@github.com:leggedrobotics/darknet_ros.git
下載完后
cd ~/catkin_workspace/src/darknet_ros/darknet
make
然后
cd ~/catkin_workspace
catkin_make -DCMAKE_BUILD_TYPE=Release
三、運行
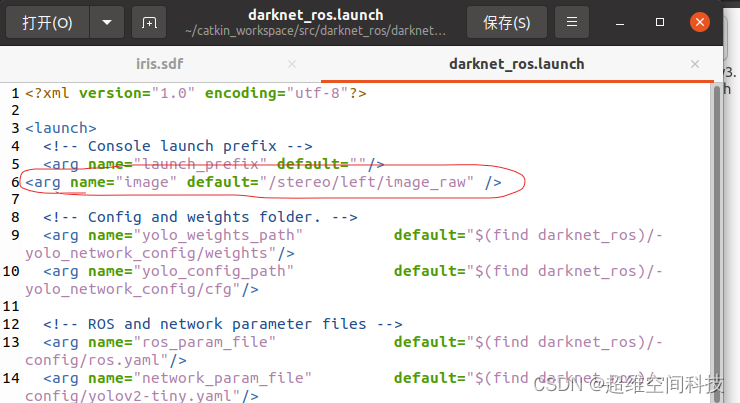
修改

<arg name="image" default="/stereo/left/image_raw" />
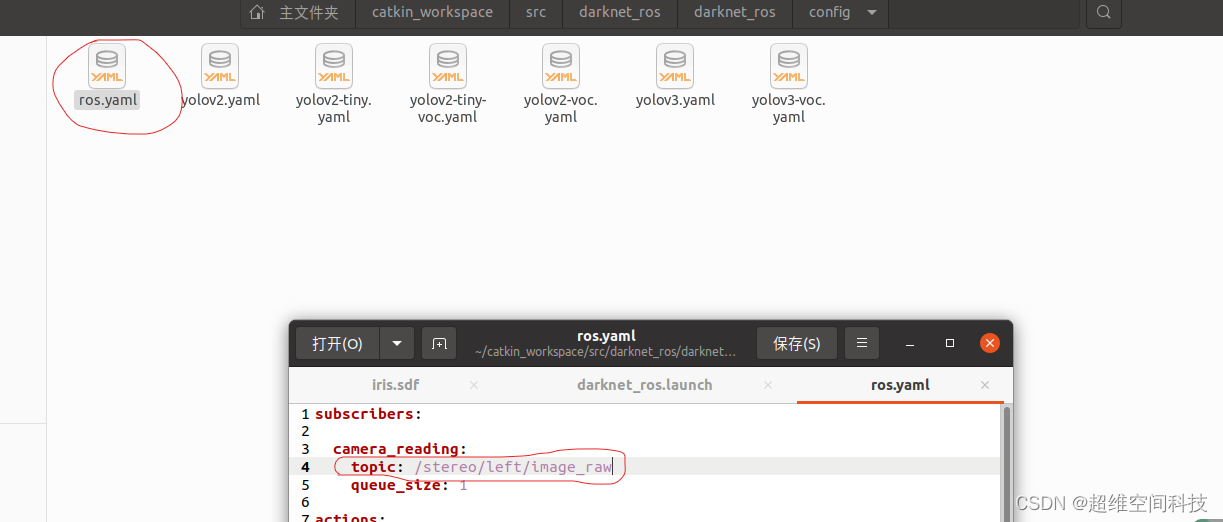
修改
topic: /stereo/left/image_raw
然后先運行
roslaunch px4 mavros_posix_sitl.launch
再運行
roslaunch darknet_ros darknet_ros.launch
出現下面的頁面表示運行正常

)

















)
