穩態分析
參考張衛平的《開關變換器的建模與控制》的1.3章節內容;伏秒平衡:在穩態下,一個開關周期內電感電流的增量是0,即
dIL(t)dt=0\frac{dI_{L}(t)}{dt} = 0dtdIL?(t)?=0。電荷平衡:在穩態下,一個開關周期內電容電壓的增量是0,即
dVC(t)dt=0\frac{dV_{C}(t)}{dt} = 0dtdVC?(t)?=0。Vg(t)=VgV_{g}\left. (t \right.) = V_{g}Vg?(t)=Vg?+v^g(t){\widehat{v}}_{g}\left. (t \right.)vg?(t),IL(t)=IL+i^L(t)I_{L}\left. (t \right.) = I_{L} + {\widehat{i}}_{L}\left. (t \right.)IL?(t)=IL?+iL?(t),VC(t)=VC+v^c(t)V_{C}\left. (t \right.) = V_{C} + {\widehat{v}}_{c}\left. (t \right.)VC?(t)=VC?+vc?(t),V(t)=V+v^(t)V\left. (t \right.) = V + \widehat{v}\left. (t \right.)V(t)=V+v(t),Iload(t)=Iload+i^load(t)I_{load}\left. (t \right.) = I_{load} + {\widehat{i}}_{load}\left. (t \right.)Iload?(t)=Iload?+iload?(t),
D(t)=D+d^(t)D\left. (t \right.) = D + \widehat{d}\left. (t \right.)D(t)=D+d(t)。上式中前者表示直流量,后者表示擾動。
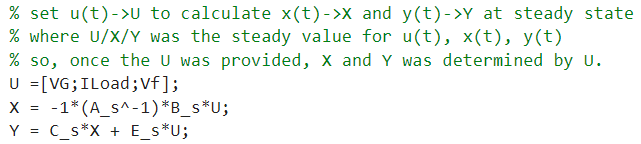
在穩態下,應該用直流量?X,U,Y?\ \mathbf{X,U,Y\ }?X,U,Y?來代替?x(t),u(t),y(t)?\ \mathbf{x}(\mathbf{t}),\mathbf{u(t),y(t)\ }?x(t),u(t),y(t)?來代替狀態變量,然后得到新的穩態下的狀態空間方程,如下所示:
[00]=A?X+B?UY=CX+EU{\begin{bmatrix}
0 \\
0
\end{bmatrix} = \mathbf{A\ X + B\ U}
}\mathbf{Y = CX + EU}[00?]=A?X+B?UY=CX+EU
[00]=A?X+B?U[00]=[?RL1?DRon?(1?D)RC1L1?(1?D)L1(1?D)C10][ILVC]+[1L1RC1L1(1?D)?(1?D)L10?1C10][VgIloadVf]{\begin{bmatrix} 0 \\ 0 \end{bmatrix} = \mathbf{A\ X + B\ U} }{\begin{bmatrix} 0 \\ 0 \end{bmatrix} = \begin{bmatrix} \frac{- R_{L1} - DR_{on} - (1 - D)R_{C1}}{L_{1}} & \frac{- (1 - D)}{L_{1}} \\ \frac{(1 - D)}{C_{1}} & 0 \end{bmatrix}\begin{bmatrix} I_{L} \\ V_{C} \end{bmatrix} + \begin{bmatrix} \frac{1}{L_{1}} & \frac{R_{C1}}{L_{1}}(1 - D) & \frac{- (1 - D)}{L_{1}} \\ 0 & \frac{- 1}{C_{1}} & 0 \end{bmatrix}\begin{bmatrix} V_{g} \\ I_{load} \\ V_{f} \end{bmatrix}}[00?]=A?X+B?U[00?]=[L1??RL1??DRon??(1?D)RC1??C1?(1?D)??L1??(1?D)?0?][IL?VC??]+[L1?1?0?L1?RC1??(1?D)C1??1??L1??(1?D)?0?]?Vg?Iload?Vf???
將其拆分為兩項,分別是:
0=?RL1?DRon?(1?D)RC1L1IL?(1?D)L1VC+1L1Vg+RC1(1?D)L1Iload?(1?D)L1Vf0=(1?D)C1IL?1C1Iload{0 = \frac{- R_{L1} - DR_{on} - (1 - D)R_{C1}}{L_{1}}I_{L} - \frac{(1 - D)}{L_{1}}V_{C} + \frac{1}{L_{1}}V_{g} + \frac{R_{C1}(1 - D)}{L_{1}}I_{load} - \frac{(1 - D)}{L_{1}}V_{f}
}{0 = \frac{(1 - D)}{C_{1}}I_{L} - \frac{1}{C_{1}}I_{load}}0=L1??RL1??DRon??(1?D)RC1??IL??L1?(1?D)?VC?+L1?1?Vg?+L1?RC1?(1?D)?Iload??L1?(1?D)?Vf?0=C1?(1?D)?IL??C1?1?Iload?
后一項者可得
IL=Iload(1?D)I_{L} = \frac{I_{load}}{(1 - D)}IL?=(1?D)Iload??
代入前一項可得
0=?RL1?DRon?(1?D)RC1L1(1?D)Iload?(1?D)L1VC+1L1Vg+RC1L1(1?D)?Iload?(1?D)L1Vf(1?D)L1VC=?RL1?DRon?(1?D)RC1L1(1?D)Iload?(1?D)L1VC+1L1Vg+RC1L1(1?D)?Iload?(1?D)L1Vf{0 = \frac{- R_{L1} - DR_{on} - (1 - D)R_{C1}}{L_{1}(1 - D)}I_{load} - \frac{(1 - D)}{L_{1}}V_{C} + \frac{1}{L_{1}}V_{g} + \frac{R_{C1}}{L_{1}}(1 - D)\ I_{load} - \frac{(1 - D)}{L_{1}}V_{f}
}{\frac{(1 - D)}{L_{1}}V_{C} = \frac{- R_{L1} - DR_{on} - (1 - D)R_{C1}}{L_{1}(1 - D)}I_{load} - \frac{(1 - D)}{L_{1}}V_{C} + \frac{1}{L_{1}}V_{g} + \frac{R_{C1}}{L_{1}}(1 - D)\ I_{load} - \frac{(1 - D)}{L_{1}}V_{f}}0=L1?(1?D)?RL1??DRon??(1?D)RC1??Iload??L1?(1?D)?VC?+L1?1?Vg?+L1?RC1??(1?D)?Iload??L1?(1?D)?Vf?L1?(1?D)?VC?=L1?(1?D)?RL1??DRon??(1?D)RC1??Iload??L1?(1?D)?VC?+L1?1?Vg?+L1?RC1??(1?D)?Iload??L1?(1?D)?Vf?
可得
VC=?RL1?DRon?(1?D)RC1(1?D)2Iload+Vg(1?D)+RC1Iload?VfV_{C} = \frac{- R_{L1} - DR_{on} - (1 - D)R_{C1}}{{(1 - D)}^{2}}I_{load} + \frac{V_{g}}{(1 - D)} + R_{C1}I_{load} - V_{f}VC?=(1?D)2?RL1??DRon??(1?D)RC1??Iload?+(1?D)Vg??+RC1?Iload??Vf?
輸出方程的穩態表達式如下
[V]=[(1?D)RC11][ILVC]+[0?RC10][VgIloadVf]\lbrack V\rbrack = \left\lbrack (1 - D)\begin{matrix}
R_{C1} & 1
\end{matrix} \right\rbrack\begin{bmatrix}
I_{L} \\
V_{C}
\end{bmatrix} + \begin{bmatrix}
0 & - R_{C1} & 0
\end{bmatrix}\begin{bmatrix}
V_{g} \\
I_{load} \\
V_{f}
\end{bmatrix}[V]=[(1?D)RC1??1?][IL?VC??]+[0??RC1??0?]?Vg?Iload?Vf???
可得
V=(1?D)RC1IL+VC?RC1Iload?=(1?D)RC1Iload(1?D)+?RL1?DRon?(1?D)RC1(1?D)2Iload+Vg(1?D)+RC1Iload?Vf?RC1Iload=RC1Iload+?RL1?DRon?(1?D)RC1(1?D)2Iload+Vg(1?D)+RC1Iload?Vf?RC1Iload=RC1Iload?RC1(1?D)Iload?RL1+DRon(1?D)2Iload+Vg(1?D)?Vf=Vg(1?D)?Vf?D(1?D)RC1Iload?1(1?D)2RL1Iload?D(1?D)2RonIload{V = (1 - D)R_{C1}I_{L} + V_{C} - R_{C1}I_{load}
}{\ = (1 - D)R_{C1}\frac{I_{load}}{(1 - D)} + \frac{- R_{L1} - DR_{on} - (1 - D)R_{C1}}{(1 - D)^{2}}I_{load} + \frac{V_{g}}{(1 - D)} + R_{C1}I_{load} - V_{f} - R_{C1}I_{load}
}{= R_{C1}I_{load} + \frac{- R_{L1} - DR_{on} - (1 - D)R_{C1}}{(1 - D)^{2}}I_{load} + \frac{V_{g}}{(1 - D)} + R_{C1}I_{load} - V_{f} - R_{C1}I_{load}
}{= R_{C1}I_{load} - \frac{R_{C1}}{(1 - D)}I_{load} - \frac{R_{L1} + DR_{on}}{(1 - D)^{2}}I_{load} + \frac{V_{g}}{(1 - D)} - V_{f}
}{= \frac{V_{g}}{(1 - D)} - V_{f} - \frac{D}{(1 - D)}R_{C1}I_{load} - \frac{1}{(1 - D)^{2}}R_{L1}I_{load} - \frac{D}{(1 - D)^{2}}R_{on}I_{load}}V=(1?D)RC1?IL?+VC??RC1?Iload??=(1?D)RC1?(1?D)Iload??+(1?D)2?RL1??DRon??(1?D)RC1??Iload?+(1?D)Vg??+RC1?Iload??Vf??RC1?Iload?=RC1?Iload?+(1?D)2?RL1??DRon??(1?D)RC1??Iload?+(1?D)Vg??+RC1?Iload??Vf??RC1?Iload?=RC1?Iload??(1?D)RC1??Iload??(1?D)2RL1?+DRon??Iload?+(1?D)Vg???Vf?=(1?D)Vg???Vf??(1?D)D?RC1?Iload??(1?D)21?RL1?Iload??(1?D)2D?Ron?Iload?
由上式可知,由于VfV_{f}Vf?,RC1R_{C1}RC1?,RL1R_{L1}RL1?,RonR_{on}Ron?的存在,使得輸出電壓穩態值是和輸出電流IloadI_{load}Iload?相關聯的。換言之,不同的輸出電流,會讓D發生調整,也會影響后續的各類小信號傳遞函數。
也可以用矩陣的形式直接計算,如下所示:
X=?A?1B?UY=CX+EU=(E?CA?1B)?U{\mathbf{X =} - \mathbf{A}^{\mathbf{- 1}}\mathbf{B\ U}
}{\mathbf{Y = CX + EU =}\left( \mathbf{E} - \mathbf{C}\mathbf{A}^{\mathbf{- 1}}\mathbf{B} \right)\mathbf{\ U}}X=?A?1B?UY=CX+EU=(E?CA?1B)?U
對應的MATLAB腳本如下
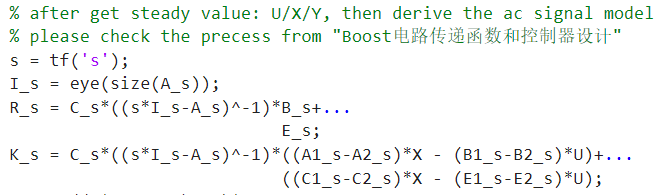
小信號模型分析
參考張衛平的《開關變換器的建模與控制》的1.3章節內容;完成穩態下的狀態空間方程后,可以繼續推導小信號模型,此時不僅用擾動量?x^(t),?u^(t),y^(t)?\ \widehat{\mathbf{x}}\mathbf{(t),\ }\widehat{\mathbf{u}}\mathbf{(t),}\widehat{\mathbf{y}}\mathbf{(t)\ }?x(t),?u(t),y?(t)?來代替?x(t),u(t),y(t)?\ \mathbf{x}(\mathbf{t}),\mathbf{u(t),y(t)\ }?x(t),u(t),y(t)?來代替狀態變量,具體如下:
dx^(t)dt=A?x^(t)+B?u^(t)+{(A1?A2)X?(B1?B2)U}d^(t)y^(t)=Cx^(t)+Eu^(t)+{(C1?C2)X?(E1?E2)U}d^(t){\frac{d\widehat{\mathbf{x}}\mathbf{(t)}}{dt} = \mathbf{A\ }\widehat{\mathbf{x}}\mathbf{(t) + B\ }\widehat{\mathbf{u}}\mathbf{(t) +}\left\{ \left( \mathbf{A}_{\mathbf{1}}\mathbf{-}\mathbf{A}_{\mathbf{2}} \right)\mathbf{X}\mathbf{-}\left( \mathbf{B}_{\mathbf{1}}\mathbf{-}\mathbf{B}_{\mathbf{2}} \right)\mathbf{U} \right\}\widehat{\mathbf{d}}\mathbf{(t)}
}{\widehat{\mathbf{y}}\mathbf{(t) = C}\widehat{\mathbf{x}}\mathbf{(t) + E}\widehat{\mathbf{u}}\mathbf{(t) +}\left\{ \left( \mathbf{C}_{\mathbf{1}}\mathbf{-}\mathbf{C}_{\mathbf{2}} \right)\mathbf{X}\mathbf{-}\left( \mathbf{E}_{\mathbf{1}}\mathbf{-}\mathbf{E}_{\mathbf{2}} \right)\mathbf{U} \right\}\widehat{\mathbf{d}}\mathbf{(t)}}dtdx(t)?=A?x(t)+B?u(t)+{(A1??A2?)X?(B1??B2?)U}d(t)y?(t)=Cx(t)+Eu(t)+{(C1??C2?)X?(E1??E2?)U}d(t)
其中,u^(t)\widehat{\mathbf{u}}(\mathbf{t})u(t)擾動信號,y^(t)\widehat{\mathbf{y}}(\mathbf{t})y?(t)是輸出信號,d^(t)\widehat{\mathbf{d}}\mathbf{(t)}d(t)是控制信號。接下來對上式進行拉普拉斯變換,可得(?I\ \mathbf{I}?I為單位矩陣):
sIx^(t)=A?x^(s)+B?u^(s)+[(A1?A2)X?(B1?B2)U]d^(s)y^(s)=Cx^(s)+Eu^(s)+[(C1?C2)X?(E1?E2)U]d^(s){\mathbf{sI}\widehat{\mathbf{x}}\mathbf{(t)} = \mathbf{A\ }\widehat{\mathbf{x}}\mathbf{(s) + B\ }\widehat{\mathbf{u}}\mathbf{(s) +}\left\lbrack \left( \mathbf{A}_{\mathbf{1}}\mathbf{-}\mathbf{A}_{\mathbf{2}} \right)\mathbf{X}\mathbf{-}\left( \mathbf{B}_{\mathbf{1}}\mathbf{-}\mathbf{B}_{\mathbf{2}} \right)\mathbf{U} \right\rbrack\widehat{\mathbf{d}}\mathbf{(s)}
}{\widehat{\mathbf{y}}\mathbf{(s) = C}\widehat{\mathbf{x}}\mathbf{(s) + E}\widehat{\mathbf{u}}\mathbf{(s) +}\left\lbrack \left( \mathbf{C}_{\mathbf{1}}\mathbf{-}\mathbf{C}_{\mathbf{2}} \right)\mathbf{X}\mathbf{-}\left( \mathbf{E}_{\mathbf{1}}\mathbf{-}\mathbf{E}_{\mathbf{2}} \right)\mathbf{U} \right\rbrack\widehat{\mathbf{d}}\mathbf{(s)}}sIx(t)=A?x(s)+B?u(s)+[(A1??A2?)X?(B1??B2?)U]d(s)y?(s)=Cx(s)+Eu(s)+[(C1??C2?)X?(E1??E2?)U]d(s)
解得(下面會繼續化簡):
x^(t)=(sI?A)?1?B?u^(s)+(sI?A)?1[(A1?A2)X?(B1?B2)U]d^(s)\widehat{\mathbf{x}}\mathbf{(t)} = \left( \mathbf{s}\mathbf{I} - \mathbf{A} \right)^{\mathbf{- 1}}\mathbf{\ B\ }\widehat{\mathbf{u}}\mathbf{(s) +}\left( \mathbf{s}\mathbf{I} - \mathbf{A} \right)^{\mathbf{- 1}}\left\lbrack \left( \mathbf{A}_{\mathbf{1}}\mathbf{-}\mathbf{A}_{\mathbf{2}} \right)\mathbf{X}\mathbf{-}\left( \mathbf{B}_{\mathbf{1}}\mathbf{-}\mathbf{B}_{\mathbf{2}} \right)\mathbf{U} \right\rbrack\widehat{\mathbf{d}}\mathbf{(s)}x(t)=(sI?A)?1?B?u(s)+(sI?A)?1[(A1??A2?)X?(B1??B2?)U]d(s)
將上式代入輸出方程,得到
y^(s)=Cx^(s)+Eu^(s)+[(C1?C2)X?(E1?E2)U]d^(s)=C{(sI?A)?1Bu^(s)+(sI?A)?1[(A1?A2)X?(B1?B2)U]d^(s)}+Eu^(s)+[(C1?C2)X?(E1?E2)U]d^(s)={C[(sI?A)?1?B]+E}u^(s)+{C(sI?A)?1?[(A1?A2)X?(B1?B2)U]+[(C1?C2)X?(E1?E2)U]}d^(s)?{\widehat{\mathbf{y}}\left( \mathbf{s} \right)\mathbf{= C}\widehat{\mathbf{x}}\left( \mathbf{s} \right)\mathbf{+ E}\widehat{\mathbf{u}}\left( \mathbf{s} \right)\mathbf{+}\left\lbrack \left( \mathbf{C}_{\mathbf{1}}\mathbf{-}\mathbf{C}_{\mathbf{2}} \right)\mathbf{X}\mathbf{-}\left( \mathbf{E}_{\mathbf{1}}\mathbf{-}\mathbf{E}_{\mathbf{2}} \right)\mathbf{U} \right\rbrack\widehat{\mathbf{d}}\left( \mathbf{s} \right)
}{\mathbf{= C}\left\{ \left( \mathbf{s}\mathbf{I} - \mathbf{A} \right)^{\mathbf{- 1}}\mathbf{B}\widehat{\mathbf{u}}\left( \mathbf{s} \right)\mathbf{+}\left( \mathbf{s}\mathbf{I} - \mathbf{A} \right)^{\mathbf{- 1}}\left\lbrack \left( \mathbf{A}_{\mathbf{1}}\mathbf{-}\mathbf{A}_{\mathbf{2}} \right)\mathbf{X}\mathbf{-}\left( \mathbf{B}_{\mathbf{1}}\mathbf{-}\mathbf{B}_{\mathbf{2}} \right)\mathbf{U} \right\rbrack\widehat{\mathbf{d}}\left( \mathbf{s} \right) \right\}\mathbf{+ E}\widehat{\mathbf{u}}\left( \mathbf{s} \right)\mathbf{+}\left\lbrack \left( \mathbf{C}_{\mathbf{1}}\mathbf{-}\mathbf{C}_{\mathbf{2}} \right)\mathbf{X}\mathbf{-}\left( \mathbf{E}_{\mathbf{1}}\mathbf{-}\mathbf{E}_{\mathbf{2}} \right)\mathbf{U} \right\rbrack\widehat{\mathbf{d}}\left( \mathbf{s} \right)
}{\mathbf{=}\left\{ \mathbf{C}\left\lbrack \left( \mathbf{s}\mathbf{I} - \mathbf{A} \right)^{\mathbf{- 1}}\mathbf{\ B} \right\rbrack\mathbf{+}\mathbf{E} \right\}\widehat{\mathbf{u}}\left( \mathbf{s} \right)\mathbf{+}\left\{ \mathbf{C}\left( \mathbf{s}\mathbf{I} - \mathbf{A} \right)^{\mathbf{- 1}}\mathbf{\ }\left\lbrack \left( \mathbf{A}_{\mathbf{1}}\mathbf{-}\mathbf{A}_{\mathbf{2}} \right)\mathbf{X}\mathbf{-}\left( \mathbf{B}_{\mathbf{1}}\mathbf{-}\mathbf{B}_{\mathbf{2}} \right)\mathbf{U} \right\rbrack\mathbf{+}\left\lbrack \left( \mathbf{C}_{\mathbf{1}}\mathbf{-}\mathbf{C}_{\mathbf{2}} \right)\mathbf{X}\mathbf{-}\left( \mathbf{E}_{\mathbf{1}}\mathbf{-}\mathbf{E}_{\mathbf{2}} \right)\mathbf{U} \right\rbrack \right\}\widehat{\mathbf{d}}\left( \mathbf{s} \right)\mathbf{\ }}y?(s)=Cx(s)+Eu(s)+[(C1??C2?)X?(E1??E2?)U]d(s)=C{(sI?A)?1Bu(s)+(sI?A)?1[(A1??A2?)X?(B1??B2?)U]d(s)}+Eu(s)+[(C1??C2?)X?(E1??E2?)U]d(s)={C[(sI?A)?1?B]+E}u(s)+{C(sI?A)?1?[(A1??A2?)X?(B1??B2?)U]+[(C1??C2?)X?(E1??E2?)U]}d(s)?
將其進一步的化簡為:
y^(s)=︸C[(sI?A)?1?B+E]Ru^(s)+︸{C(sI?A)?1?[(A1?A2)X?(B1?B2)U]+[(C1?C2)X?(E1?E2)U]}Kd^(s)\widehat{\mathbf{y}}\left( \mathbf{s} \right)\mathbf{=}\underset{\mathbf{R}}{\overset{\mathbf{C}\left\lbrack \left( \mathbf{s}\mathbf{I} - \mathbf{A} \right)^{\mathbf{- 1}}\mathbf{\ B}\mathbf{+}\mathbf{E} \right\rbrack}{︸}}\widehat{\mathbf{u}}\left( \mathbf{s} \right)\mathbf{+}\underset{\mathbf{K}}{\overset{\left\{ \mathbf{C}\left( \mathbf{s}\mathbf{I} - \mathbf{A} \right)^{\mathbf{- 1}}\mathbf{\ }\left\lbrack \left( \mathbf{A}_{\mathbf{1}}\mathbf{-}\mathbf{A}_{\mathbf{2}} \right)\mathbf{X}\mathbf{-}\left( \mathbf{B}_{\mathbf{1}}\mathbf{-}\mathbf{B}_{\mathbf{2}} \right)\mathbf{U} \right\rbrack\mathbf{+}\left\lbrack \left( \mathbf{C}_{\mathbf{1}}\mathbf{-}\mathbf{C}_{\mathbf{2}} \right)\mathbf{X}\mathbf{-}\left( \mathbf{E}_{\mathbf{1}}\mathbf{-}\mathbf{E}_{\mathbf{2}} \right)\mathbf{U} \right\rbrack \right\}}{︸}}\widehat{\mathbf{d}}\left( \mathbf{s} \right)y?(s)=R︸C[(sI?A)?1?B+E]?u(s)+K︸{C(sI?A)?1?[(A1??A2?)X?(B1??B2?)U]+[(C1??C2?)X?(E1??E2?)U]}?d(s)
化簡得到:
y^(s)=Ru^(s)+Kd^(s)[v^(s)]=[R11(s)R12(s)0][v^g(s)i^load(s)0]+[K11(s)]d^(s){\widehat{\mathbf{y}}\left( \mathbf{s} \right)\mathbf{= R}\widehat{\mathbf{u}}\left( \mathbf{s} \right)\mathbf{+ K}\widehat{\mathbf{d}}\left( \mathbf{s} \right)
}{\left\lbrack \widehat{v}(s) \right\rbrack\mathbf{=}\begin{bmatrix}
\mathbf{R}_{\mathbf{11}}\mathbf{(s)} & \mathbf{R}_{\mathbf{12}}\mathbf{(s)} & \mathbf{0}
\end{bmatrix}\begin{bmatrix}
{\widehat{v}}_{g}\left. (s \right.) \\
{\widehat{i}}_{load}\left. (s \right.) \\
0
\end{bmatrix}\mathbf{+}\begin{bmatrix}
\mathbf{K}_{\mathbf{11}}\mathbf{(s)}
\end{bmatrix}\widehat{\mathbf{d}}\left( \mathbf{s} \right)}y?(s)=Ru(s)+Kd(s)[v(s)]=[R11?(s)?R12?(s)?0?]?vg?(s)iload?(s)0??+[K11?(s)?]d(s)
對應的MATLAB腳本如下
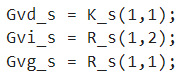
將其展開可得Gvd(s)G_{vd}\left. (s \right.)Gvd?(s),Gvi(s)G_{vi}\left. (s \right.)Gvi?(s),Gvg(s)G_{vg}\left. (s \right.)Gvg?(s)分別是占空比對輸出電壓的控制傳遞函數,輸出電流對輸出電壓的擾動傳遞函數,輸入電壓對輸出電壓的擾動傳遞函數。
Gvd(s)=v^(s)d^(s)∣v^g(s)=0i^load(s)=0=K11(s){G_{vd}\left. (s \right.) = \frac{\widehat{v}(s)}{\widehat{\mathbf{d}}\left( \mathbf{s} \right)}|_{\begin{matrix}
{\widehat{v}}_{g}\left. (s \right.) = 0 \\
{\widehat{i}}_{load}\left. (s \right.) = 0
\end{matrix}} = \mathbf{K}_{\mathbf{11}}\mathbf{(s)}
}Gvd?(s)=d(s)v(s)?∣vg?(s)=0iload?(s)=0??=K11?(s)
Gvi(s)=v^(s)i^load(s)∣v^g(s)=0d^(s)=0=R12(s){G_{vi}\left. (s \right.) = \frac{\widehat{v}(s)}{{\widehat{i}}_{load}\left. (s \right.)}|_{\begin{matrix}
{\widehat{v}}_{g}\left. (s \right.) = 0 \\
\widehat{\mathbf{d}}\left( \mathbf{s} \right) = 0
\end{matrix}} = \mathbf{R}_{\mathbf{12}}\mathbf{(s)}
}Gvi?(s)=iload?(s)v(s)?∣vg?(s)=0d(s)=0??=R12?(s)
Gvg(s)=v^(s)v^g(s)∣i^load(s)=0d^(s)=0=R11(s){G_{vg}\left. (s \right.) = \frac{\widehat{v}(s)}{{\widehat{v}}_{g}\left. (s \right.)}|_{\begin{matrix}
{\widehat{i}}_{load}\left. (s \right.) = 0 \\
\widehat{\mathbf{d}}\left( \mathbf{s} \right) = 0
\end{matrix}} = \mathbf{R}_{\mathbf{11}}\mathbf{(s)}}Gvg?(s)=vg?(s)v(s)?∣iload?(s)=0d(s)=0??=R11?(s)
對應的MATLAB腳本為
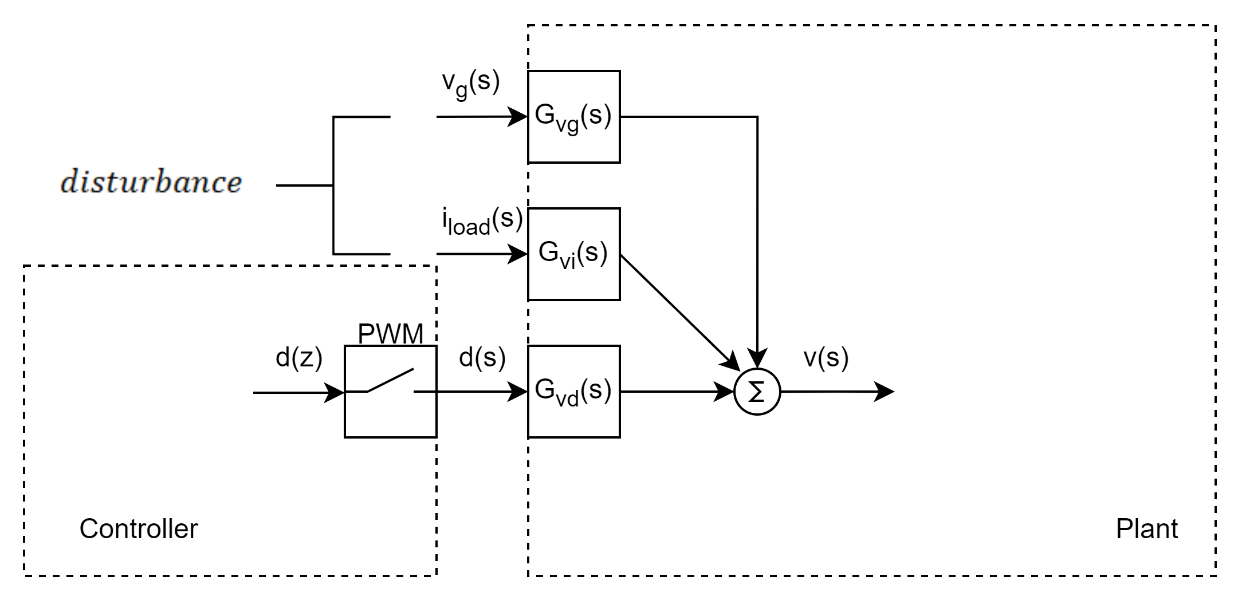
輸入電壓擾動,輸出電流擾動以及占空比擾動組合在一起,輸出電壓擾動為:
v^(s)=Gvg(s)v^g(s)+Gvi(s)i^load(s)+Gvd(s)d^(s)\widehat{v}(s) = G_{vg}\left. (s \right.){\widehat{v}}_{g}\left. (s \right.) + G_{vi}\left. (s \right.){\widehat{i}}_{load}\left. (s \right.) + G_{vd}\left. (s \right.)\widehat{d}(s)v(s)=Gvg?(s)vg?(s)+Gvi?(s)iload?(s)+Gvd?(s)d(s)
正如下圖所示:
重新化簡下式:
x^(t)=︸(sI?A)?1?BM?u^(s)+︸(sI?A)?1[(A1?A2)X?(B1?B2)U]Nd^(s)\widehat{x}(t) = \underset{M}{\overset{(sI - A)^{- 1}\ B}{︸}}\ \widehat{u}(s) + \underset{N}{\overset{(sI - A)^{- 1}\left\lbrack \left( A_{1} - A_{2} \right)X - \left( B_{1} - B_{2} \right)U \right\rbrack}{︸}}\widehat{d}(s)x(t)=M︸(sI?A)?1?B??u(s)+N︸(sI?A)?1[(A1??A2?)X?(B1??B2?)U]?d(s)
化簡得到:
x^(s)=Mu^(s)+Nd^(s)[i^L(s)v^C(s)]=[M11(s)M12(s)0M21(s)M22(s)0][v^g(s)i^load(s)0]+[N11(s)N21(s)]d^(s){\widehat{\mathbf{x}}\left( \mathbf{s} \right)\mathbf{= M}\widehat{\mathbf{u}}\left( \mathbf{s} \right)\mathbf{+ N}\widehat{\mathbf{d}}\left( \mathbf{s} \right)
}{\begin{bmatrix}
{\widehat{i}}_{L}(s) \\
{\widehat{v}}_{C}(s)
\end{bmatrix} = \begin{bmatrix}
M_{11}(s) & M_{12}(s) & 0 \\
M_{21}(s) & M_{22}(s) & 0
\end{bmatrix}\begin{bmatrix}
{\widehat{v}}_{g}\left. (s \right.) \\
{\widehat{i}}_{load}\left. (s \right.) \\
0
\end{bmatrix} + \begin{bmatrix}
N_{11}(s) \\
N_{21}(s)
\end{bmatrix}\widehat{d}(s)}x(s)=Mu(s)+Nd(s)[iL?(s)vC?(s)?]=[M11?(s)M21?(s)?M12?(s)M22?(s)?00?]?vg?(s)iload?(s)0??+[N11?(s)N21?(s)?]d(s)
MATLAB腳本為:

將其展開可得Gild(s)G_{ild}\left. (s \right.)Gild?(s),Gili(s)G_{ili}\left. (s \right.)Gili?(s),Gilg(s)G_{ilg}\left. (s \right.)Gilg?(s)分別是占空比對電感電流的控制傳遞函數,輸出電流對電感電流的擾動傳遞函數,輸入電壓對電感電流的擾動傳遞函數。
Gild(s)=i^L(s)d^(s)∣v^g(s)=0i^load(s)=0=N11(s){G_{ild}\left. (s \right.) = \frac{{\widehat{i}}_{L}(s)}{\widehat{\mathbf{d}}\left( \mathbf{s} \right)}|_{\begin{matrix} {\widehat{v}}_{g}\left. (s \right.) = 0 \\ {\widehat{i}}_{load}\left. (s \right.) = 0 \end{matrix}} = \mathbf{N}_{\mathbf{11}}\mathbf{(s)} }Gild?(s)=d(s)iL?(s)?∣vg?(s)=0iload?(s)=0??=N11?(s) Gili(s)=i^L(s)i^load(s)∣v^g(s)=0d^(s)=0=M12(s){G_{ili}\left. (s \right.) = \frac{{\widehat{i}}_{L}(s)}{{\widehat{i}}_{load}\left. (s \right.)}|_{\begin{matrix} {\widehat{v}}_{g}\left. (s \right.) = 0 \\ \widehat{\mathbf{d}}\left( \mathbf{s} \right) = 0 \end{matrix}} = \mathbf{M}_{\mathbf{12}}\mathbf{(s)} }Gili?(s)=iload?(s)iL?(s)?∣vg?(s)=0d(s)=0??=M12?(s)Gilg(s)=i^L(s)v^g(s)∣i^load(s)=0d^(s)=0=M11(s){G_{ilg}\left. (s \right.) = \frac{{\widehat{i}}_{L}(s)}{{\widehat{v}}_{g}\left. (s \right.)}|_{\begin{matrix} {\widehat{i}}_{load}\left. (s \right.) = 0 \\ \widehat{\mathbf{d}}\left( \mathbf{s} \right) = 0 \end{matrix}} = \mathbf{M}_{\mathbf{11}}\mathbf{(s)}}Gilg?(s)=vg?(s)iL?(s)?∣iload?(s)=0d(s)=0??=M11?(s)
對應的MATLAB腳本為
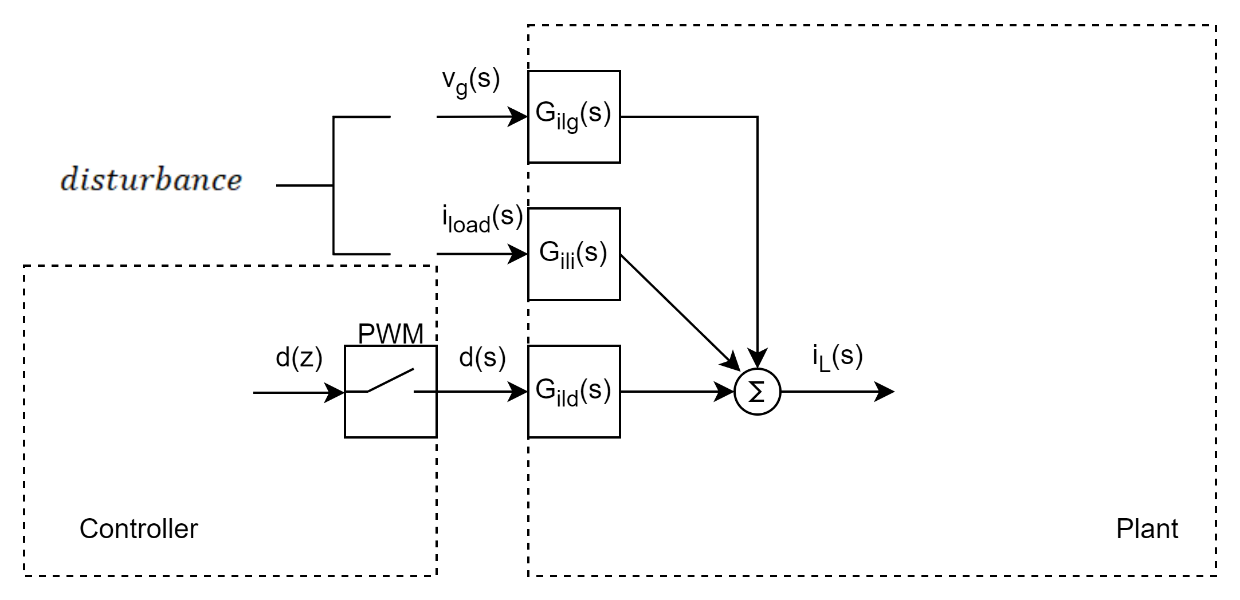
輸入電壓擾動,輸出電流擾動以及占空比擾動組合在一起,電感電流的擾動為:
i^L(s)=Gilg(s)v^g(s)+Gili(s)i^load(s)+Gild(s)d^(s){\widehat{i}}_{L}(s) = G_{ilg}\left. (s \right.){\widehat{v}}_{g}\left. (s \right.) + G_{ili}\left. (s \right.){\widehat{i}}_{load}\left. (s \right.) + G_{ild}\left. (s \right.)\widehat{d}(s)iL?(s)=Gilg?(s)vg?(s)+Gili?(s)iload?(s)+Gild?(s)d(s)
如下圖所示
總結,這里得到了影響電感電流和輸出電壓的控制/擾動傳遞函數,重新羅列如下:
i^L(s)=︸Gilg(s)v^g(s)+Gili(s)i^load(s)disturbance+︸Gild(s)d^(s)control{\widehat{i}}_{L}(s) = \underset{disturbance}{\overset{G_{ilg}\left. (s \right.){\widehat{v}}_{g}\left. (s \right.) + G_{ili}\left. (s \right.){\widehat{i}}_{load}\left. (s \right.)}{︸}} + \underset{control}{\overset{G_{ild}\left. (s \right.)\widehat{d}(s)}{︸}}iL?(s)=disturbance︸Gilg?(s)vg?(s)+Gili?(s)iload?(s)?+control︸Gild?(s)d(s)?
v^(s)=︸Gvg(s)v^g(s)+Gvi(s)i^load(s)disturbance+︸Gvd(s)d^(s)control\widehat{v}(s) = \underset{disturbance}{\overset{G_{vg}\left. (s \right.){\widehat{v}}_{g}\left. (s \right.) + G_{vi}\left. (s \right.){\widehat{i}}_{load}\left. (s \right.)}{︸}} + \underset{control}{\overset{G_{vd}\left. (s \right.)\widehat{d}(s)}{︸}}v(s)=disturbance︸Gvg?(s)vg?(s)+Gvi?(s)iload?(s)?+control︸Gvd?(s)d(s)?
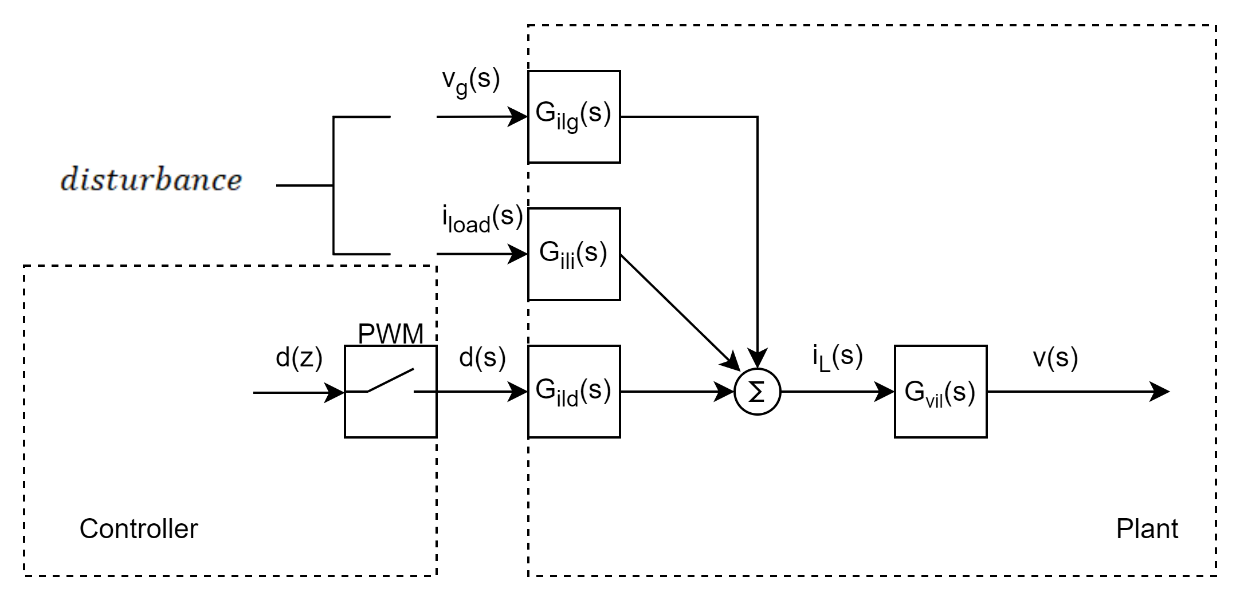
同時,也可以得到電感電流到輸出電壓的傳遞函數,我們可以認為,外部的輸入電壓和輸出電流擾動是先轉化為對應的電感電流,然后再轉化為對輸出電壓的影響。
Gvil(s)=v^(s)d^(s)∣v^g(s)=0i^load(s)=0i^L(s)d^(s)∣v^g(s)=0i^load(s)=0=v^(s)i^L(s)G_{vil}\left. (s \right.) = \frac{\frac{\widehat{v}(s)}{\widehat{\mathbf{d}}\left( \mathbf{s} \right)}|_{\begin{matrix} {\widehat{v}}_{g}\left. (s \right.) = 0 \\ {\widehat{i}}_{load}\left. (s \right.) = 0 \end{matrix}}}{\frac{{\widehat{i}}_{L}(s)}{\widehat{\mathbf{d}}\left( \mathbf{s} \right)}|_{\begin{matrix} {\widehat{v}}_{g}\left. (s \right.) = 0 \\ {\widehat{i}}_{load}\left. (s \right.) = 0 \end{matrix}}} = \frac{\widehat{v}(s)}{{\widehat{i}}_{L}(s)}Gvil?(s)=d(s)iL?(s)?∣vg?(s)=0iload?(s)=0??d(s)v(s)?∣vg?(s)=0iload?(s)=0???=iL?(s)v(s)?
如下圖所示




:『混沌工程的定義與實踐』)











學習總結-20250916)
)

