一、具身智能產業概述與定義
1.1 具身智能的基本概念與內涵
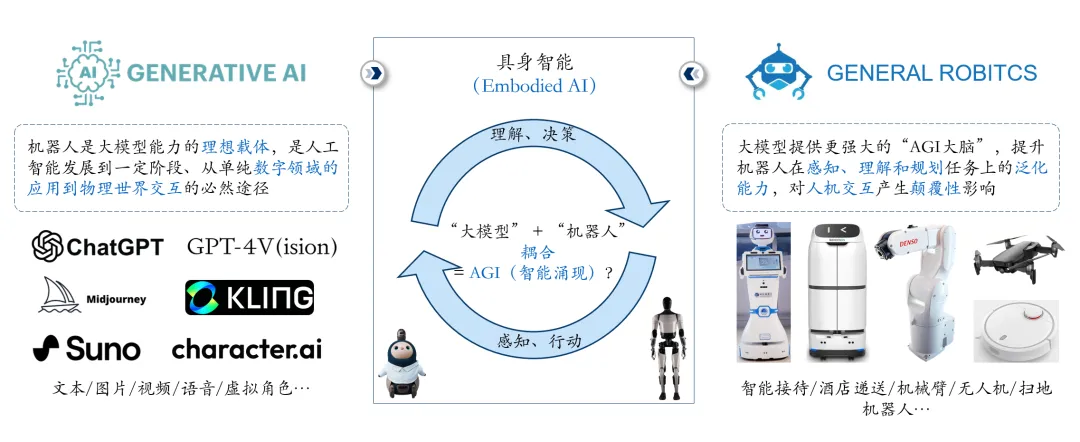
具身智能(Embodied Intelligence)是指通過物理實體與環境進行交互的智能系統,其核心在于將感知、決策和執行緊密結合,使智能體能夠在動態環境中自主感知、學習和執行任務。具身智能顛覆了傳統人工智能的 “離身性” 局限,強調智能的本質必須通過身體與環境的動態互動來塑造和體現。

通俗地說,具身智能是指具有身體的智能,其機器大腦能夠幫助決策,從而支配肢體快速對外部環境變化做出反應,核心在于實體設備與智能決策的深度融合。與僅依賴計算的 “離身智能” 不同,具身智能設備既能通過傳感器感知物理世界,又能借助大模型理解任務、自主決策并執行。
從技術本質上看,具身智能強調 “具身認知”,即智能并非孤立存在于算法和代碼中,而是在身體與環境的動態交互過程中涌現。這種理念源于認知科學的研究成果,表明人類的智能并非僅依賴大腦,而是大腦、身體和環境相互作用的結果。
1.2 具身智能的發展歷程與演變
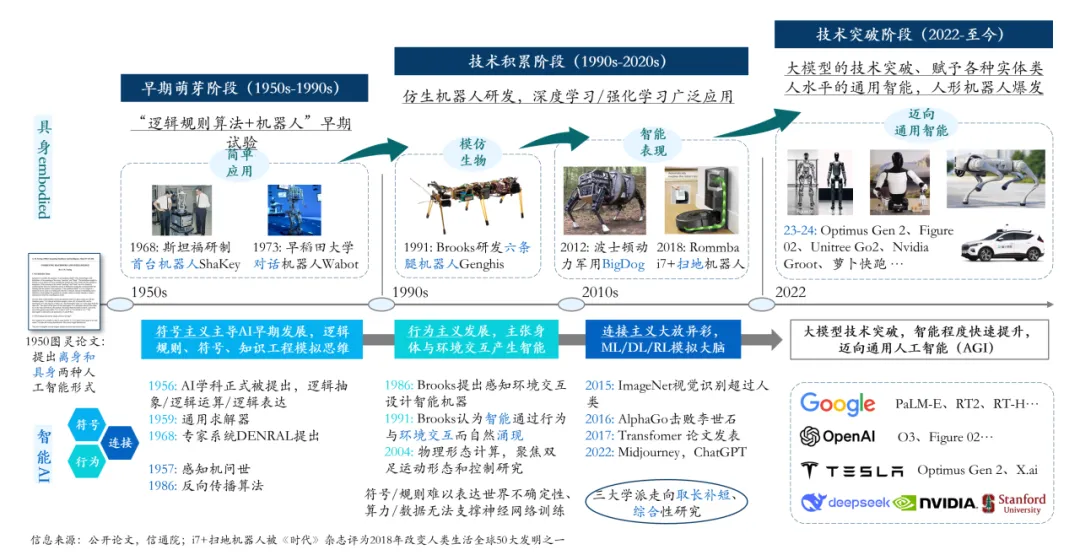
具身智能的概念最早可追溯至 1950 年,在圖靈的論文 《計算機器與智能》 中就被首次提出。然而,由于當時技術條件限制,這一構想在隨后數十年里未能取得突破,直到認知科學與機器人學的發展才使其重獲生機。
1986 年,機器人學家羅德尼?布魯克斯從控制論角度出發,強調智能是具身化(Embodied)和情境化(Contextlized)的,傳統以表征為核心的經典AI 進化路徑是錯誤的,這成為具身智能的奠基性理念。布魯克斯認為 “真正的智能無法脫離身體存在,具身化是人工智能走向通用化的必經之路”。
進入 21 世紀,隨著深度學習技術的興起,具身智能迎來了新的發展機遇。2023 年,世界被人工智能浪潮席卷,探索 “人形機器人”"大模型 "“具身智能” 等成為行業未來可持續發展的關鍵。2023 年 6 月,在第七屆世界智能大會智能科技展上,人形機器人的逐步完善為具身智能的落地提供了方向。
2024 年 3 月 17 日,OpenAI 與人形機器人初創公司 Figure 合作推出了 Figure 01 機器人,再次將機器人、具身智能等推向了公眾討論的焦點。同年 8 月,中科源碼服務機器人研究院發布了全國首個 “溫江造” 基于物流場景的具身智能機器人。
2025 年 1 月 16 日,具身智能入選全國科學技術名詞審定委員會聯合國家語言資源監測與研究中心等機構聯合發起的 "2024 年度十大科技名詞 "。2025 年 3 月 5 日,具身智能首次被寫入國務院政府工作報告,標志著其正式進入國家戰略規劃。
1.3 具身智能的分類與技術架構
具身智能可以按照不同的標準進行分類。從物理載體形態來看,具身智能主要包括以下幾類:
- 人形機器人:作為具身智能的典型代表,人形機器人因其高度的泛用性和與人類交互的天然優勢備受關注。人形機器人被視為具身智能的關鍵載體之一,不僅能夠以主人公的視角去自主感知物理世界,用擬人化的思維路徑去學習,還具備理解力、交互力、規劃能力等,較普通機器人有更高的工作效率。
- 非人形具身智能產品:包括輪式機器人、足式機器人、機械臂、無人機、自動駕駛車輛等多種形態。這些設備雖然不具備人形外觀,但同樣通過物理實體與環境進行交互,實現感知、決策和執行的閉環系統。
- 虛擬具身智能:通過虛擬現實(VR)/ 增強現實(AR)技術構建的虛擬智能體,能夠在虛擬環境中進行交互和學習。
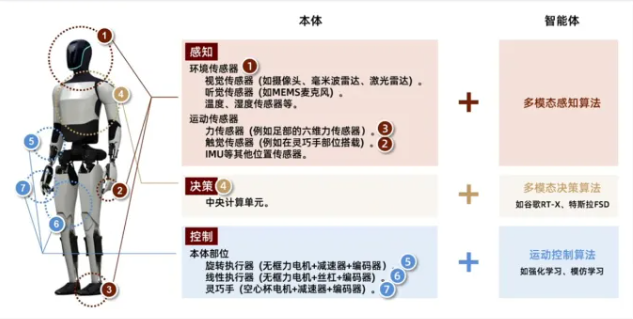
從技術架構角度,具身智能系統主要由以下幾個部分組成:
- 感知層(感知):負責獲取和處理環境信息,為智能體的決策和行為提供依據。感知層通過各種傳感器(如視覺傳感器、觸覺傳感器、力覺傳感器等)實現環境感知。感知層的發展經歷了從單一模態傳感器向多模態傳感器融合的過程,使機器人能夠全方位感知環境,獲取更豐富的信息。
- 決策層(決策):作為具身智能的核心,決策層需要類似人類大腦的處理能力,以滿足機器人在理解指令、分解任務、規劃子任務、識別物體等方面的需求。傳統機器人在多維度人機交互方面存在難題,而大模型的突破為解決這一問題提供了新思路。這些模型可以充當機器人的 “大腦”,利用其強大的語言理解和生成能力,與人類進行多維度交互。
- 執行層(行動):負責將決策層的指令轉化為具體行動,包括各種驅動系統和執行機構。執行層的性能直接決定了機器人的運動能力和操作精度。
- 協同層(交互):實現多智能體之間的協作與交互,通過群體智能算法構建多智能體協作網絡。分布式協同技術依托群體智能算法,能夠在智慧物流等場景中實現高效協作。

1.4 具身智能的核心技術與特點
技術是推動具身智能機器人發展的關鍵驅動力。近期AI大模型快速迭代,已經展現海量知識積累,能夠理解并進行邏輯推理,同時還具備自主學習迭代的能力,對當下具身智能機器人發展起到了積極的促進作用。
圍繞具身智能的四大核心能力模塊,具身智能機器人需要多種技術共同在機器人本體上有機融合優化,形成“感知-學習-決策-行動”的高效閉環,而不同能力模塊也有多樣化的技術實現路線。

具身智能涉及多學科交叉創新,形成了 “感知 — 決策 — 執行 — 協同” 的全棧能力鏈。其核心技術主要包括:
1. 多模態感知技術:通過融合視覺、觸覺、力覺等傳感器的時空數據,實現對三維環境的毫米級建模。工業機器人結合激光雷達與觸覺反饋系統,展示了多源感知信息的協同優勢。
2. 強化學習與自適應控制技術:基于億級仿真訓練平臺,智能體在虛擬空間積累物理交互經驗后,可無縫遷移至真實場景。這些技術的應用打破了程序化指令的桎梏,使智能體能夠快速適應新環境和新任務。
3. 具身大模型技術:通過參數化知識表示與跨模態對齊,支撐 “一腦多機” 架構,使單一智能系統可適應不同應用場景。多模態大模型整合了文本、圖像、語音等多種信息,為具身智能提供了強大的認知能力。
4. 分布式協同技術:依托群體智能算法,構建了多智能體協作網絡。在智慧物流場景中,上百臺自動導引車(AGV)通過動態任務分配與沖突消解算法,將倉儲分揀效率提升 300%,展現了群體智能的規模效應。
具身智能的主要特點包括:
1 環境交互自主性:具身智能最大的特質就是能夠以主人公的視角去自主感知物理世界,用擬人化的思維路徑去學習,從而做出人類期待的行為反饋,而不是被動的等待數據投喂。
2. 多模態融合能力:具身智能將往多模態融合方向發展,實現視覺、聽覺、觸覺等多種感知能力的深度融合,提升機器人在復雜環境中的適應性和交互體驗。
3. 泛化與學習能力:強化學習與模仿學習等先進算法的應用,使具身智能系統擁有更強的自主學習能力,能夠根據環境變化自我優化,實現更加靈活和智能的行為決策。
4. 人機協作潛力:具身智能不是取代人類,而是作為人類能力的延展,讓我們能夠更高效、更安全、更舒適地完成各種任務。未來,具身智能機器人可能會成為家庭中的陪伴者,工作中的合作者,甚至是探索未知世界的先鋒。
1.5 具身智能的關鍵特征
- 物理載體與環境交互
具身智能的“本體”是物理實體(如機器人、機械臂等),需通過傳感器(如攝像頭、雷達、IMU)實現感知,再通過執行器(如關節、靈巧手)執行動作。環境交互是智能涌現的基礎,脫離環境則無法完整展現能力。
- 感知-決策-行動閉環
智能體需通過“感知→理解→決策→執行→反饋”的動態循環實現自我優化。例如,人形機器人在執行任務時,通過視覺感知識別物體,結合大語言模型(LLM)規劃路徑,再通過運動控制算法驅動執行。
- 多模態交互與動態適應性
智能體需融合視覺、聽覺、觸覺等多模態數據,通過SLAM(同步定位與建圖)重建環境,實現復雜任務規劃。例如,特斯拉Optimus通過SLAM技術在非結構化環境中導航。
二、具身智能產業鏈全景分析
2.1 產業鏈整體架構
具身智能產業鏈可分為上、中、下游三個核心環節,涵蓋從硬件基礎到軟件系統再到應用場景的完整生態。
上游環節聚焦核心硬件、基礎材料及軟件系統,主要包括芯片、傳感器、控制器、電機、通信模組、能源管理、AI 算法及云服務等關鍵技術。上游是具身智能產業的硬件基礎,為中游和下游提供必要的硬件支撐,其質量、性能和可靠性直接影響到中游產品的整體性能和下游應用的實際效果。
中游環節為具身智能產品制造,其實現形態多樣,需結合具體任務與環境需求選擇最優載體。中游是產業鏈的技術核心,涉及AI 算法、大模型、操作系統、云服務以及中間件的開發與集成,通過編程和系統集成,將上游的硬件組件 “激活”,使其能夠執行復雜的智能任務。
下游環節為應用場景,包括工業制造、服務業、醫療健康、教育娛樂、交通出行、公共安全等領域。下游是具身智能技術價值實現的關鍵環節,通過與各行業的深度融合,推動產業智能化升級和社會生產力提升。
具身智能產業鏈圖譜

2.2 上游產業鏈分析
2.2.1 芯片與計算平臺
芯片是具身智能的 “心臟”,為智能體提供強大的計算能力,支持復雜的算法運行,用于高效處理感知和決策任務。目前機器人的 “大腦” 主要采用 AI 芯片,包括 GPU、TPU、NPU 等。
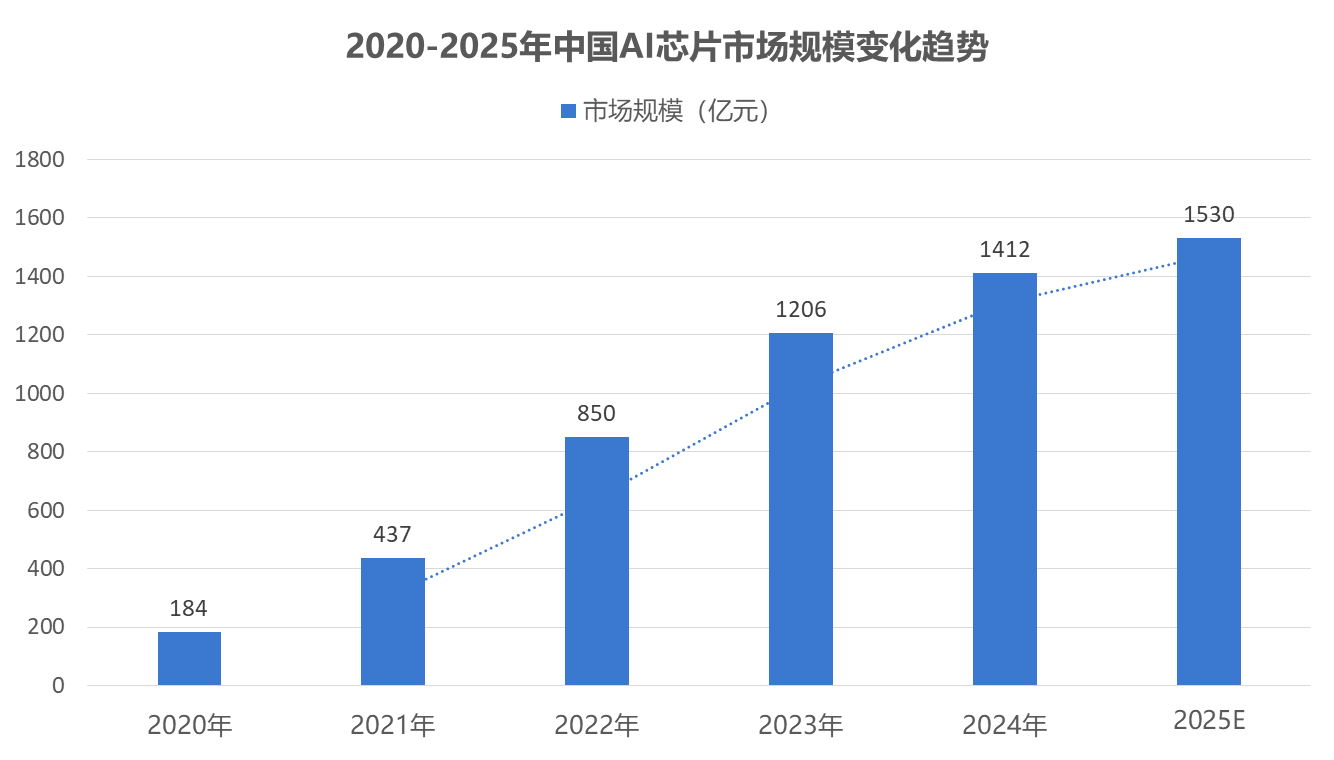
市場規模:AI芯片作為專門為人工智能計算設計的集成電路,近年來受到廣泛關注,中國AI芯片行業市場規模不斷增長。2023年中國AI芯片市場規模達到1206億元,同比增長41.9%。據中商產業研究院預測,2025 年中國 AI 芯片市場規模將達 1530 億元,寒武紀、地平線等企業逐步縮小與國際巨頭的差距。AI 大模型蓬勃發展,驅動算力需求呈指數級攀升,預計 2025 年全球 AI 算力需求將達 2020 年 10 倍,智能制造、醫療影像、金融交易等領域成為算力消耗大戶。
技術趨勢:隨著具身智能的發展,對芯片的能效比要求越來越高。2025 年寒武紀等企業推出具身智能專用芯片,實現 5TOPS/W 能效比突破,支撐人形機器人實時決策需求。此外,存算一體架構等新興技術也在快速發展,力圖填補國內市場空白。
國內外龍頭企業:
- 國外:NVIDIA(Orin 芯片)、Intel(Mobileye)、Tesla(Dojo 芯片)。
- 國內:地平線(征程系列)、寒武紀(思元系列)、華為(昇騰系列)、紫光國微(國產嵌入式 AI 芯片,融合量子加密技術)。
2.2.2 傳感器系統
傳感器負責收集外部環境的多維數據,如視覺、聽覺、觸覺、力矩等,是實現具身智能感知和交互功能的基礎。從技術壁壘、價值量和未來產業趨勢來看,傳感器的重要性排序為:六維力矩 > 觸覺傳感 > 關節傳感 > 雙目攝像頭 > IMU。
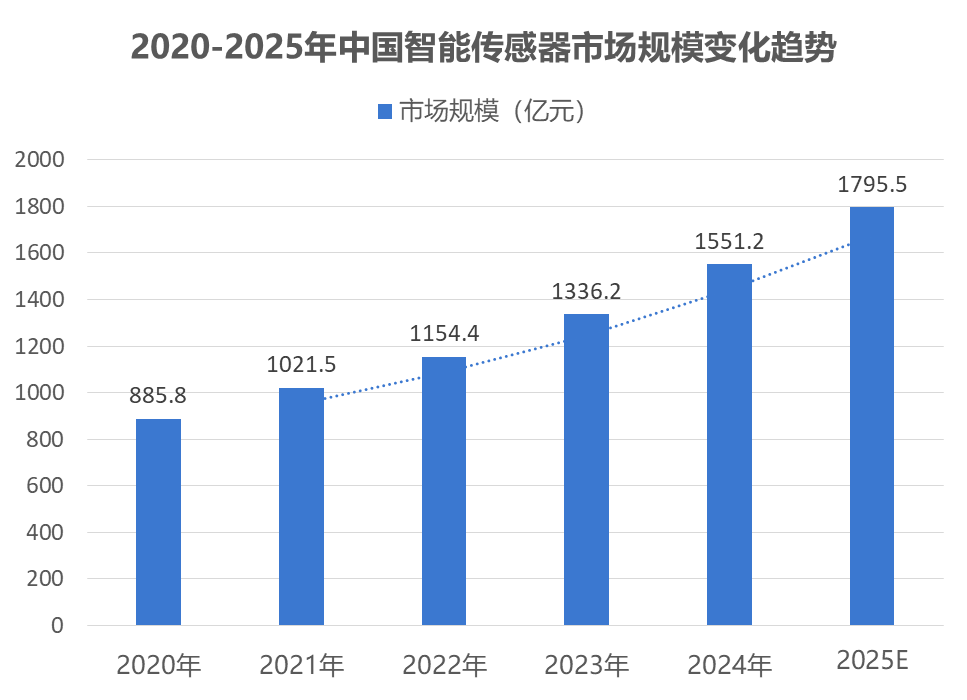
市場規模:隨著技術的不斷進步和應用領域的拓展,中國智能傳感市場規模快速增長。2023年中國智能傳感器市場規模為1336.2億元,近五年年均復合增長率達15.96%,2024年市場規模約為1551.2億元。據中商產業研究院及中研網數據預測,2025年中國智能傳感器市場規模將達到1795.5億元,觸覺傳感器、激光雷達等高精度傳感器需求激增。
細分領域:
- 力傳感器:能夠測量智能體與環境的接觸力和力矩,分為一維、三維、六維力矩傳感器。其中六維力傳感器技術難度極高,需要測量空間三個坐標軸方向的力和繞三個坐標軸方向的力矩的 6 個維度的力,高精度解耦各個方向和力矩間的干擾。
- 觸覺傳感器:追求高靈敏度(多維力感知)、高集成度(單位面積列陣單元多)、高延展性(耐用、高分辨率柔性材料)、成本低,以便獲取物體信息,提升靈巧手抓取的力和力矩的控制效果。
- 機器視覺:可分為 2D 和 3D 視覺,2D 成像技術使用到的傳統 RGB 相機,僅能捕捉到物體表面的紋理信息,沒有物體到相機的距離信息,3D 視覺感知可補充 2D 視覺的不足。目前人形機器人主流是 3D 視覺方案為主,搭配激光雷達等多融合方案為輔,以保證具身智能的環境感知及交互能力。
- IMU 慣性傳感器:能夠測量物體的角速度和加速度,主要負責姿態控制和定位導航。利用加速度計和陀螺儀需精確對齊,以避免軸偏角誤差,校準算法的開發也非常關鍵。

國內外龍頭企業:
- 國外:Velodyne(激光雷達)、Tactile Labs(觸覺傳感器)。
- 國內:
- 視覺傳感器:禾賽科技(激光雷達)、奧比中光(3D 視覺)、韋爾股份(CIS 圖像傳感器)、奧普特(3D 視覺傳感器)、凌云光(可配置視覺系統、智能視覺裝備)、水晶光電(濾光片等光學元器件龍頭)。
- 六維力矩傳感:柯力傳感、東華測試、安倍龍、納芯微、凌云股份等。
- 觸覺傳感器:華培動力、安倍龍、康斯特、漢威科技、士蘭微等。
- IMU 傳感:明皜傳感(蘇州固锝)、芯動聯科、華依科技、矽睿科技、深迪半導體、士蘭微、美泰科技、星網宇達、理工導航等。
2.2.3 控制器與伺服系統
控制器是具身智能機器人的 “智慧大腦”,對傳感器收集的數據進行高效處理,并發出精確的控制指令,指導執行機構完成相應的任務動作。伺服系統則根據控制器指令實現對運動的精確控制,完成精準定位和操作。
市場規模:控制器與伺服系統市場規模達 248億元,高精度、高響應速度成為技術競爭焦點。匯川技術市場份額占比達 28.2%,在國內市場占據領先地位。
細分領域:
- 無框力矩電機:電機結構緊湊,沒有軸、軸承、外殼、反饋或端蓋;僅由定子和轉子組成,高徑長比,多磁極設計,是一種特殊類型的永磁無刷同步電機,具備質量輕、體積小、集成度高、響應快、能效高等優勢,適合扭矩需求大的場景。
- 空心杯電機:主要運用于人形機器人的靈巧手,無刷空心杯電機轉子由環形磁鋼、轉軸及其固定件組成,定子由環形硅鋼片和空心杯線圈粘結而成。核心工藝為線圈的設計和線圈繞制、自動化設備等 3 大壁壘。
國內外龍頭企業:
- 國外:科爾摩根、TQ Robodrive、Nidec、Parker 等。
- 國內:匯川技術(運動控制)、瑞德智能、雷賽智能、貝仕達克、和而泰等。
2.2.4 通信模組與能源管理
通信模組負責設備之間的數據傳輸和通信,確保系統各部分之間的協同工作,實現信息的無縫流轉。能源管理系統為整個系統提供穩定的能源供應,包括高性能電池、先進的電源管理系統、能量分配、熱管理等系統,確保機器人能夠長時間工作、散熱和運行穩定。
通信模組分類:包括 3G/4G/5G 模組、Wi-Fi模組、LoRa 模組、ZigBee 模組、NB-loT 模組、藍牙模組等。
能源管理趨勢:隨著具身智能的發展,對能源管理系統提出了更高要求,包括更長的續航時間、更快的充電速度、更高效的能源利用等。高性能電池技術和先進的電源管理系統成為研發重點。
國內外龍頭企業:
- 通信模組:廣和通、日海智能、有方科技、龍尚科技、中興等。
- 能源管理:
- 國外:松下、LG 化學等。
- 國內:寧德時代、比亞迪、德賽電池(機器人能源管理一體化方案)、中熔電氣(國內唯一覆蓋1000V 機器人高壓平臺的熔斷器供應商)、三花智控(液冷技術機器人熱管理)。
2.3 中游產業鏈分析

2.3.1 AI 算法與大模型
AI 算法是具身智能的 “大腦”,負責處理和分析數據,做出決策。大模型的引入,極大地提升了具身智能的感知精度、決策效率和執行自主性,使其能夠更靈活地適應復雜多變的環境,推動智能技術邁向新高度。
大模型分類:大模型分為具身智能大模型和非具身智能大模型。非具身大模型即傳統的語音圖文視頻大模型,如 GPT4 或豆包等;具身智能大模型則分為自動駕駛大模型(如特斯拉的 FSD、華為乾崑 ADS3.0)和機器人大模型(如 Figure AI 的 Helix,智元機器人的 GO-1 等)。
技術路線:具身大模型可以分為端到端大模型和分層具身大模型。從人體 “大腦 - 小腦 - 肢體” 的架構來看,分層大模型通過不同層次模型協作,利用底層硬件層和中間響應快的小模型彌補上層大語言模型的不足,推動機器人在實際場景的應用,曾經是主流。但隨著人工智能的發展,VLA(視覺 - 語言 - 動作)等端到端模型能夠直接實現從人類指令到機械臂執行,即輸入圖像及文本指令,輸出夾爪末端動作,需要數據的不斷積累和技術的迭代。未來端到端大模型是具身智能的主流。
國內外龍頭企業:
-
通用大模型:百度文心一言、阿里云通義、騰訊混元、字節的云雀大模型,科大訊飛的星火大模型、商湯的 SenseChat 大模型、智譜清言 GLM-4 等 AI 通用類大模型。
-
機器人大模型:國外:Figure AI 的 Helix 大模型、谷歌的 DeepMind 等。國內:智元 GO-1、星動紀元 ERA-42(端到端原生機器人大模型)、銀河通用 GraspVLA(端到端具身抓取基礎大模型 GraspVLA)等。
-
垂類自動駕駛大模型:比亞迪璇璣大模型、小鵬的 X-GPT 大模型、毫末智行的 DriveGPT、Apollo ADFM 等。
2.3.2 操作系統與開發平臺
操作系統為智能設備提供統一的軟件平臺,支持各種應用程序的運行和管理。開發平臺則為具身智能的開發、訓練和部署提供一體化解決方案。
技術趨勢:隨著具身智能的發展,專用的操作系統和開發平臺越來越受到重視。2024 年全球首個通用具身智能平臺 “慧思開物” 填補行業空白,該平臺由 AI 大模型驅動的 “大腦” 和數據驅動的 “小腦” 構成,首次實現單個軟件系統在機械臂、人形機器人等不同構型上的兼容,可以在工業分揀等多場景中實現高精度真機操作。
國內外龍頭企業:
- 操作系統:中科創達(全球領先的智能操作系統龍頭)、云從科技(深耕人機協同操作系統領域)、華如科技(主營是軍事仿真,細分專注于 AI 訓練仿真沙盒系統)。
- 開發平臺:北京人形機器人創新中心的 “慧思開物” 平臺、Jaka Robotics Co Ltd 的具身智能平臺提供全棧訓練解決方案,既經濟又高效。
2.3.3 云服務與數據平臺
云服務基于云計算技術,能夠提供彈性可擴展的計算資源,滿足具身智能在處理大規模數據和運行高性能算法時的需求。數據平臺則為具身智能提供數據存儲、管理和分析服務。
市場規模:受生成式 AI 和大模型所帶動的算力需求刺激下,云計算市場規模預計將保持長期穩定的增長態勢。據中國信通院數據,2023 年我國云計算市場規模 6165 億元,2027 年有望突破 2.1 萬億元。
技術趨勢:隨著具身智能的發展,云邊協同成為重要趨勢。具身智能需要處理大量的數據和運行復雜的算法,云服務能夠提供彈性可擴展的計算資源,滿足具身智能在處理大規模數據和運行高性能算法時的需求。同時,邊緣計算技術的發展也使得部分計算任務可以在設備端完成,降低了對云端算力的依賴。
國內外龍頭企業:
- 國外:亞馬遜的 AWS RoboMake、微軟的 Azure、英偉達的 Omniverse。
- 國內:百度智能云(結合 Apollo 自動駕駛平臺和 PaddlePaddle深度學習框架,應用與自動駕駛、配送機器人等場景)、阿里云 ET 工業大腦、華為云、天翼云、京東云等。
2.4 下游產業鏈分析
2.4.1 人形機器人
人形機器人是具身智能的典型代表,被視為實現具身智能的最佳載體之一。人形機器人因其高度仿生結構與靈活適應性,能夠更有效地吸收并整合知識,具備與人類相媲美的操作能力和移動性,這使得它們在執行任務時能夠展現出更高的靈活性和適應性。
市場規模:2024 年人形機器人市場規模達 4800 億元,協作機器人、移動機器人等新興品類增速超 80%。優必選 Walker X 實現商業化預售,標志著人形機器人開始進入商業化階段。
技術進展:2025 年北京人形機器人創新中心研發的人形機器人 “天工 “能夠攀爬 134 級階梯、最快跑步速度可達 12 公里 / 小時,能輕松應對溝壑、高度差等復雜地形。星動紀元公司的最新款第六代人形機器人” 星動 STAR1"與人一起” 重走 " 絲綢之路,并參與了奔跑穿越野外的挑戰,在整個過程中,它能夠自適應在戈壁、石子路、草地等復雜地形上穩定奔跑,速度達到了 3.6 米 / 秒,相當于每小時跑 13 公里左右。
國內外龍頭企業:
- 國外:Boston Dynamics(波士頓動力)、特斯拉 Optimus、傅利葉智能等。
- 國內:優必選、宇樹科技、開普勒、KEPLER 等。
2.4.2 非人形具身智能產品
非人形具身智能產品包括輪式機器人、足式機器人、機械臂、無人機、自動駕駛車輛等多種形態。這些產品雖然不具備人形外觀,但同樣通過物理實體與環境進行交互,實現感知、決策和執行的閉環系統。
市場規模:2024 年中國具身智能市場規模達 8634 億元,同比增長 65%。其中,機器人占比 55.6%,自動駕駛載具占比 44.4%。
細分領域:
- 工業機器人:2024 年市場規模達 4800 億元,協作機器人、移動機器人等新興品類增速超 80%。特斯拉 Optimus 在工廠執行物料搬運,效率較傳統機械臂提升 2-3 倍。
- 服務機器人:商用清潔、餐飲配送機器人滲透率提升至 15%,人形機器人在展廳、機場等場景提供導覽服務,部分企業實現小規模商用。
- 自動駕駛載具:2024 年市場規模達 3834 億元,L4 級自動駕駛出租車在特定區域實現商業化運營,Robotaxi 日均訂單量突破 10 萬單。
國內外龍頭企業:
- 工業機器人:新松機器人(國產工業機器人龍頭)、配天機器人(SCARA 機器人)、遨博智能(協作機器人)等。
- 服務機器人:云跡科技(酒店配送)、擎朗智能(餐飲配送)等。
- 自動駕駛載具:元戎啟行、文遠知行、WeRide 等。
2.4.3 應用場景分析
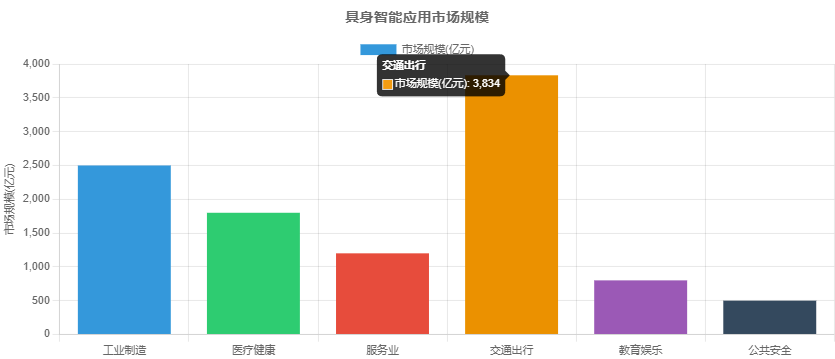
具身智能的應用場景日益豐富,已廣泛滲透到工業制造、醫療健康、服務業、交通出行、教育娛樂、公共安全等多個領域。
工業制造領域:具身智能機器人能夠有效應對柔性生產需求,在多品類、小批次的生產模式下,快速響應生產線切換和參數調整。在 3C、汽車、新能源等行業,這些機器人憑借高精度的視覺檢測和精準的運動控制能力,實時感知并適應復雜變化的工業環境,大幅提升生產效率和產品質量,降低人力成本和生產周期。例如,蔚來汽車科技(安徽)有限公司第二智能制造工廠內,具身智能機器人靈活地穿梭于 “魔方” 存取平臺,快速讀取訂單、精準抓取車身。據統計,引入具身智能技術后,該工廠的生產效率提升超 30%。
醫療健康領域:手術機器人實現亞毫米級操作,康復機器人通過力反饋適配患者運動軌跡,藥品配送機器人優化院內物流效率。天智航(骨科手術機器人)、柏惠維康(神經外科導航)、和華瑞博(介入手術)等企業在醫療機器人領域取得了顯著進展。積水潭醫院、協和醫院與高校合作開展臨床實驗,推動國產設備認證。
服務業領域:商用清潔、餐飲配送機器人滲透率提升至 15%,人形機器人在展廳、機場等場景提供導覽服務,部分企業實現小規模商用。上海清寶引擎機器人有限公司的機器人已經規模量產及商用,隨著標準和平臺打通,具身智能場景將逐步走入現實生活,進入消費級市場。
交通出行領域:自動駕駛載具市場規模達 3834 億元,L4 級自動駕駛出租車在特定區域實現商業化運營,Robotaxi 日均訂單量突破 10 萬單。比亞迪璇璣大模型、小鵬的 X-GPT 大模型、毫末智行的 DriveGPT、Apollo ADFM 等垂類自動駕駛大模型不斷迭代,推動自動駕駛技術向更高水平發展。
教育娛樂領域:具身智能在教育娛樂領域的應用正在興起,如智能教育機器人、互動娛樂機器人等。這些產品能夠為用戶提供更加個性化、互動性更強的教育和娛樂體驗。
公共安全領域:消防救援機器人在四川、山西等地完成百次實戰測試,在危險環境中執行任務,保障人員安全。此外,安防機器人、巡檢機器人等在公共安全領域也發揮著越來越重要的作用。
三、國內外產業發展現狀對比
3.1 全球具身智能產業發展概況
市場規模:全球具身智能市場呈現快速增長態勢。據 ResearchAndMarkets 預測,全球具身 AI 市場將從 2025 年的 44.4 億美元增長到 2030 年的 230.6 億美元,年復合增長率達到 39%。另據高盛集團在 2023 年發布的報告預測,在理想情景下,人形機器人市場規模到 2035 年有望達到 1540 億美元。
區域分布:全球具身智能產業主要集中在 亞洲、北美和歐洲 三大區域。其中,亞洲特別是中國在專利申請方面處于領先地位,截至 2025 年 4 月 9 日,全球具身智能領域的專利申請超 83.13 萬件,中國具身智能專利申請超 21.99 萬件,位居全球第一,占全球申請量約 26.45%。
技術格局:雖然中國具身智能專利申請數量居首位,但與第二名的美國相差不足 10%;且從專利申請人維度來看,全球排名前十的專利申請人,主要來自日本、韓國、美國。這是因為日韓美等國家早期在工業機器人等領域具有大量專利積累,在驅動系統、感知系統等領域均具有先發優勢。
企業格局:全球排名前十的專利申請人主要來自日本、韓國、美國。國際科技巨頭如 Google、NVIDIA、OpenAI 等積極布局具身智能領域,推出了一系列具有創新性的產品和技術。
3.2 中國具身智能產業發展現狀
- 政策環境:2025 年,具身智能首次被寫入國務院政府工作報告,明確列為未來產業培育重點。北京、上海、廣東等十余省市同步出臺專項政策,如深圳發布《深圳市具身智能機器人技術創新與產業發展行動計劃 (2025-2027 年)》,提出 “2027 年產業鏈企業超 500 家” 的目標。政策紅利推動行業進入爆發期,2025 年 1-2 月國內具身智能機器人領域融資規模達 44.5 億元,接近 2024 年全年總量。
- 市場規模:2024 年,中國具身智能市場規模達 8634 億元,同比增長 65%。其中,機器人占比 55.6%,自動駕駛載具占比 44.4%。中研普華分析師預測,2025 年市場規模將突破 9731 億元,2030 年有望達 4 萬億元。
- 技術進展:在技術方面,中國取得了顯著突破。多模態大模型方面,北京人形機器人創新中心推出的 “慧思開物” 平臺,實現單系統兼容機械臂、人形機器人等不同構型,標志著具身智能技術邁向新高度。核心零部件國產化方面,減速器、控制器、傳感器等國產化率提升至 45%,諧波減速器成本下降 30%,推動整機價格降至 10 萬元以下。
- 區域發展:長三角、珠三角、京津冀形成三大產業集群。廣東依托完備的產業鏈 (覆蓋核心零部件、傳感器、視覺系統等) 和產業生態,集聚超千家機器人企業,深圳機器人產業規模突破千億。上海張江建成全國首個異構人形機器人訓練場,推動仿真到現實的技術遷移。
- 企業布局:中國在具身智能領域正在積極布局,已有超 100 家相關企業,融資總額超過百億元。國內具身智能的玩家主要包括科技大廠、機器人公司、新能源車企等,包括華為、比亞迪、騰訊、小米、宇樹科技、優必選、科大訊飛等,同時也產生了一批新生代的具身智能公司。
3.3 美國具身智能產業發展現狀
- 政策環境:美國政府高度重視具身智能的發展,將其視為實現通用人工智能的重要路徑。2025 年 5 月,美國 OMB 發布新的 AI 政策指南,將前拜登時代的 "權利影響"AI 和 “安全影響” 敏感使用類別合并為單一的 “高影響 AI” 類別,要求對可能產生重大影響的 AI 應用進行部署前測試、記錄影響評估、持續性能監控和有意義的人工干預機會。
- 技術研發:美國在具身智能的基礎研究和技術創新方面處于全球領先地位。OpenAI、Google、NVIDIA等科技巨頭在具身智能領域投入巨大,推出了一系列具有創新性的產品和技術。例如,Google 的 RT-2 模型是 VLA(視覺 - 語言 - 動作)的典型代表,它能夠從網絡數據和機器人數據中學習,將知識轉化為機器人控制的通用指令,顯著提升了機器人的泛化能力和語義推理能力。
- 企業布局:美國擁有一批全球領先的具身智能企業,包括 Google、NVIDIA、OpenAI、Tesla 等。這些企業在 AI芯片、大模型、機器人等領域具有強大的技術實力和創新能力。
- 應用場景:美國在工業制造、醫療健康、服務業等領域積極推動具身智能的應用。例如,Tesla 的 Optimus 機器人在工廠執行物料搬運,效率較傳統機械臂提升 2-3 倍。此外,美國在太空探索、深海探測等極端環境科研任務中,也在積極探索具身智能的應用。
3.4 歐洲具身智能產業發展現狀
- 政策環境:歐洲在 AI 監管方面采取了更為嚴格的措施。歐盟 AI 法案采取全面的方法,對不同風險級別和行業的 AI 應用進行監管,從醫療和教育領域的高風險應用到面向消費者的 AI 系統。相比之下,英國的擬議法案似乎更專注于在前沿 AI 系統發布前對其進行監管。
- 技術研發:歐洲在具身智能的某些細分領域具有獨特優勢。例如,英國在 2025 年 1 月通過了 AI Opportunities Action Plan,概述了 50 項措施以加速人工智能的開發和部署,包括創建專門的 AI 增長區,簡化 AI 基礎設施的規劃許可和能源連接,增加公共計算能力,建立國家數據圖書館,以及成立 AI 能源委員會以解決 AI 發展的能源需求。
- 企業布局:歐洲擁有一批在機器人和 AI 領域具有深厚技術積累的企業,如ABB、發那科、庫卡等外企在上海設立研發中心,聚焦汽車制造、精密加工場景的工業機器人。此外,歐洲還有許多專注于特定領域的初創企業,在醫療機器人、服務機器人等領域具有創新性解決方案。
- 應用場景:歐洲在工業自動化、醫療健康、農業等領域積極推動具身智能的應用。例如,在醫療領域,直觀復星(達芬奇系統本地化生產)、微創機器人(圖邁腔鏡手術機器人)在歐洲市場占據較高份額。在工業領域,ABB、發那科、庫卡等企業的機器人在汽車制造、精密加工等場景發揮著重要作用。
3.5 日韓具身智能產業發展現狀
- 日本:日本在機器人領域具有深厚的技術積累和產業基礎。全球排名前十的專利申請人中,日本企業占據重要位置。日本企業在驅動系統、感知系統等領域具有先發優勢。安川電機、發那科、松下等日本企業在機器人核心零部件和整機制造方面具有強大的實力。日本政府也在積極推動具身智能的發展,將其視為保持日本在機器人領域領先地位的重要途徑。
- 韓國:韓國在具身智能領域也有較強的實力。全球排名前十的專利申請人中,韓國企業占據一定比例。韓國在機器人技術特別是在人形機器人方面取得了顯著進展。韓國企業如 Robotous 在六維力矩傳感器領域采用容式方案,具有較高的技術水平。韓國政府也在積極支持具身智能的發展,通過政策引導和資金支持,推動具身智能技術的研發和應用。
3.6 國內外產業發展對比分析
- 專利申請對比:截至 2025 年 4 月 9 日,全球具身智能領域的專利申請超 83.13 萬件,中國具身智能專利申請超 21.99 萬件,位居全球第一,占全球申請量約 26.45%。然而,中國雖然在專利申請數量上領先,但與第二名的美國相差不足 10%;且從專利申請人維度來看,全球排名前十的專利申請人,主要來自日本、韓國、美國。
- 技術路線對比:國外企業在基礎研究和核心技術方面具有一定優勢,特別是在 AI 芯片、大模型、傳感器等領域。中國企業則在應用場景創新和產業化方面表現突出,能夠快速將技術轉化為產品并推向市場。
- 產業鏈對比:中國在產業鏈的完整性方面具有優勢,已形成了較為完整的具身智能產業鏈。然而,在一些核心零部件如高精度傳感器、高性能芯片等方面,仍存在一定的進口依賴。相比之下,日本、美國等國家在核心零部件方面具有更強的自主研發能力。
- 應用場景對比:國內外在應用場景方面各有側重。美國和歐洲在高端制造、醫療健康等領域的應用較為成熟;中國則在消費級市場、物流配送等領域具有獨特優勢。例如,中國的掃地機器人年出貨量突破 3000 萬臺,在消費端取得了顯著成功。
四、我國市場競爭格局與重點企業分析
4.1 我國具身智能產業集群分布
- 長三角產業集群:長三角地區以上海為核心,包括江蘇、浙江等省市,形成了 “工業 + 醫療 + 國際協作” 的特色發展格局。上海作為具身智能產業的技術研發標桿城市,將具身智能納入 " 模塑申城 " 方案五大關鍵領域之一。上海在高端工業機器人、醫療機器人等領域具有顯著優勢,ABB、發那科、庫卡等外企在上海設立研發中心,聚焦汽車制造、精密加工場景的工業機器人。
- 珠三角產業集群:珠三角地區以深圳為核心,依托其電子產業生態、供應鏈優勢和開放環境,正在成為我國具身智能產業的重要一極。深圳有超 5 萬家機器人相關企業,上市企業超 30 家,7 家企業入選摩根士丹利全球人形機器人上市公司百強名單。深圳在消費級機器人、物流與配送機器人以及低空經濟領域具備較強競爭力。
- 京津冀產業集群:京津冀地區以北京為核心,已將具身智能確立為新一代人工智能發展的核心方向。根據火石創造產業數據中心,海淀區內已經集聚具身智能企業近 300 家、人形機器人整機企業 20 余家,開設具身智能及機器人相關專業的院校 21 所,形成了以 “大腦、小腦、本體” 為核心的具身智能全產業鏈條。北京在工業協作、醫療手術機器人領域具備競爭優勢,有望成為 “高端機器人創新策源地”。
- 其他區域中心:除了三大產業集群外,杭州、成都、武漢等城市也在積極發展具身智能產業。杭州作為中國具身智能產業的場景化創新典范,依托數字經濟先發優勢與 “產學研用” 深度融合機制,構建了"技術攻關 - 場景驗證 - 產業賦能" 的特色發展路徑。杭州發展具身智能更聚焦于人形機器人領域,2024 年 12 月發布的《杭州市人形機器人產業發展規劃(2024—2029 年)》提出,以 “最優本體 + 最強大腦” 為重點,加快構建人形機器人整機研發、設計、制造、應用的一體化創新體系和全產業鏈生態。
4.2 我國各地具身智能產業政策發展重點
具身智能產業首次寫入2025年我國政府工作報告:2025年“具身智能”被納入國家未來產業培育方向,明確為發展新質生產力的核心載體。并且由工信部牽頭制定專項政策,成立國家級創新平臺(如北京“國家地方共建人形機器人創新中心”),推動共性技術攻關。
(一) 北京:千億基金打造全球創新高地
- 資金規模:設立1000億元政府投資基金,存續期15年,重點支持AI與機器人技術研發。
- 技術路徑:構建“大腦-小腦-本體”協同創新體系,推動具身智能從實驗室向規模化應用轉化。
- 場景突破:亦莊開發區推出“具身智能機器人十條”,首創數據采集實訓場獎勵、人形機器人銷售補貼,開放九大標桿場景(如高端制造、產業園區)。
- 發展目標:2027年突破100項關鍵技術,量產萬臺機器人,培育千億級產業集群。
(二)上海:模型驅動與場景生態并重
- 技術突破:專項支持具身語料技術,發放最高500萬元/年語料券,破解高質量數據集稀缺難題。
- 平臺建設:打造算力、實訓場、中試等五大平臺,發放最高4000萬元/年算力券。
- 應用牽引:聚焦物流、醫療康養、家政服務等領域,單個示范項目支持最高1000萬元。
- 發展目標:2027年核心產業規模突破500億元,落地百家骨干企業、百大場景、百件國際領先產品。
(三)深圳:硬件基礎+生態賦能
- 產業集聚:打造“具身智能港”,整合華為云創新中心、騰訊等企業,形成“核心組件-本體制造-場景應用”全鏈條。
- 技術攻堅:聚焦AI芯片、關節模組等核心零部件,目標培育10家百億估值企業。
- 資本熱度:2025年融資超百起,億元級達35起,凸顯爆發潛力。
(四)長三角協同:制造優勢+場景開放
- 江蘇:蘇州支持具身智能平臺建設(最高2億元),昆山布局AI服務器、智能網聯汽車等新千億集群。
- 浙江:開放50個以上“未來工廠”場景,推動人形機器人量產(2027年目標2萬臺)。
- 無錫:三年打造300個應用場景,產業規模目標300億元。
(五)其他地區特色布局
- 山東:對首破5000萬元銷售額的人形機器人企業獎勵800萬元,核心零部件補貼300萬元。
- 武漢:支持“楚才”人形機器人量產,單個項目最高2000萬元。
- 四川:推動腦機接口與具身智能融合,布局全息交互艙等前沿產品。
4.3 我國具身智能企業競爭格局
(一) 企業類型分布
中國具身智能市場的參與者主要包括以下幾類:
- 科技巨頭:如華為、騰訊、百度、字節跳動等,這些企業在 AI 大模型、云計算等領域具有強大實力,正積極布局具身智能。
- 傳統機器人企業:如優必選、新松機器人、配天機器人等,這些企業在機器人本體制造方面具有豐富經驗,正加速向具身智能轉型。
- 新能源車企:如比亞迪、小鵬、蔚來等,這些企業將自動駕駛技術與具身智能相結合,推出了一系列創新產品。
- 初創企業:如宇樹科技、星動紀元、智元機器人等,這些企業專注于具身智能的某一細分領域,具有較強的創新能力和技術優勢。
(二) 市場份額
目前中國具身智能市場仍處于快速發展階段,市場格局尚未完全穩定。從細分領域來看:
- AI 芯片:華為(昇騰系列)、地平線(征程系列)、寒武紀(思元系列)等企業市場份額不斷提升。
- 傳感器:在視覺傳感器領域,禾賽科技、奧比中光等企業占據一定市場份額;在六維力矩傳感器領域,柯力傳感、東華測試等企業表現突出。
- 機器人整機:優必選、新松機器人、宇樹科技等企業在各自細分領域具有一定優勢。
(三) 競爭特點
- 技術驅動:具身智能市場的競爭主要圍繞技術創新展開,特別是 AI 大模型、傳感器技術、運動控制等核心技術。
- 場景導向:企業越來越注重應用場景的開發和落地,通過解決特定場景的問題來實現商業化突破。
- 生態構建:構建完整的產業生態成為競爭的新焦點,企業通過開放平臺、開源社區等方式吸引合作伙伴,擴大影響力。
4.4 我國具身智能重點企業分析
(一) 華為技術有限公司
企業概況:華為作為全球領先的信息與通信技術解決方案供應商,積極布局具身智能領域,在 AI 芯片、大模型、通信模組等方面具有強大實力。
技術優勢:
- 昇騰系列 AI 芯片:華為的昇騰 910 芯片基于 7nm 增強版工藝,最大功耗為 350W,算力可達到 256TFOPS,為具身智能提供強大的算力支持。
- 鴻蒙操作系統:華為的鴻蒙操作系統為智能設備提供統一的軟件平臺,支持各種應用程序的運行和管理,適用于具身智能設備。
- 乾崑 ADS3.0:華為的自動駕駛大模型,為具身智能在自動駕駛領域的應用提供技術支持。
產品布局:
- 昇騰 AI 芯片:為具身智能設備提供強大的計算能力。
- 鴻蒙操作系統:為智能設備提供統一的軟件平臺。
- 智能機器人平臺:提供具身智能開發、訓練和部署的一體化解決方案。
市場表現:華為在 AI 芯片、操作系統等上游領域具有顯著優勢,其昇騰系列芯片已在多個具身智能產品中得到應用。
(二) 優必選科技股份有限公司
企業概況:優必選是中國領先的人形機器人研發、制造和銷售企業,專注于為家庭、教育、商業等領域提供智能服務。
技術優勢:
- Walker 系列人形機器人:優必選的 Walker 系列人形機器人在運動控制、環境感知等方面具有先進技術,能夠實現雙足行走、上下樓梯等復雜動作。
- AI 大模型:優必選開發了專門用于機器人的大模型,提升了機器人的認知能力和交互能力。
- 群腦網絡技術:優必選在全球范圍內首次把群腦網絡用于機器人執行整條生產線的工業級任務,實現了多機器人協同工作。
產品布局:
- Walker 系列人形機器人:包括 Walker X 等產品,已實現商業化預售。
- 教育機器人:如 Alpha 系列,為教育領域提供智能化解決方案。
- 服務機器人:如 Cruzr 系列,在商業場景提供導覽、咨詢等服務。
市場表現:優必選在人形機器人領域處于國內領先地位,其產品已在全球多個國家和地區實現銷售。2025 年優必選獲比亞迪戰略投資 8 億元用于人形機器人產線建設,進一步增強了其市場競爭力。
(三) 宇樹科技
企業概況:宇樹科技是國內領先的四足機器人公司,在具身智能領域進行了積極探索。其產品如 Unitree Go1 和 A1 不僅具備高動態運動能力,還能夠通過多模態傳感器實現環境感知和自主導航。
技術優勢:
- 運動控制技術:宇樹科技在四足機器人的運動控制方面具有深厚積累,其產品能夠在復雜地形上穩定行走和奔跑。
- 多模態感知技術:宇樹科技的機器人集成了多種傳感器,能夠全方位感知環境,實現自主導航和避障。
- 強化學習技術:通過將強化學習與機器人控制相結合,宇樹科技的機器人能夠在復雜環境中自主學習和優化行為,展現出強大的自適應能力。
產品布局:
- 四足機器人:如 Unitree Go1、A1、B2-W 等產品,在巡檢、物流、救援等領域得到了廣泛應用。
- 人形機器人:宇樹科技也在積極開發人形機器人產品,拓展具身智能的應用場景。
市場表現:宇樹科技在四足機器人市場上的占有率高達 60% 以上,其產品已在全球多個國家和地區得到應用。2025 年宇樹科技完成 C 輪融資達 80 億元,進一步增強了其技術研發和市場拓展能力。
(四) 深圳星動紀元科技有限公司
企業概況:星動紀元是一家專注于人形機器人研發的創新企業,其最新款第六代人形機器人 “星動 STAR1” 在 2025 年一舉打破了電驅人形機器人奔跑速度的世界紀錄。
技術優勢:
- 動態平衡技術:星動紀元的機器人能夠在復雜地形上穩定奔跑,展現出優異的動態平衡能力。
- 高精度操作技術:星動紀元的機器人能夠完成夾水餃等精細化動作,展現出高精度的操作能力。
- 端到端大模型:星動紀元開發了 ERA-42 端到端原生機器人大模型,提升了機器人的認知能力和任務執行能力。
產品布局:
- STAR 系列人形機器人:包括 STAR1 等產品,具備高動態運動能力和高精度操作能力。
- 工業協作機器人:星動紀元也在開發適用于工業場景的協作機器人產品。
市場表現:星動紀元雖然成立時間不長,但在人形機器人領域已取得了顯著的技術突破和市場認可。其產品已在工業制造、商業服務等領域開始應用。
(五) 智元創新(上海)科技有限公司
企業概況:智元機器人是一家專注于具身智能和人形機器人研發的創新企業,其 GO-1 機器人在 2025 年引起了廣泛關注。
技術優勢:
- AI 大模型:智元機器人開發了啟元大模型,為機器人提供強大的認知能力和交互能力。
- 靈巧操作技術:智元機器人的機器人具備高精度的操作能力,能夠完成復雜的抓取和操作任務。
- 自主導航技術:智元機器人的機器人能夠在復雜環境中自主導航和避障,適應多樣化的應用場景。
產品布局:
- GO 系列人形機器人:包括 GO-1 等產品,具備高動態運動能力和智能交互能力。
- 工業服務機器人:智元機器人也在開發適用于工業場景的服務機器人產品。
市場表現:智元機器人雖然成立時間不長,但在人形機器人領域已取得了一定的技術突破和市場認可。其產品已在工業制造、商業服務等領域開始應用。
五、產業發展面臨的挑戰與機遇
5.1 技術挑戰
數據獲取與質量問題:高質量機器人數據集的缺失是具身智能發展的一大障礙。收集真實世界的機器人數據不僅耗時費力且成本高昂,而仿真數據又存在與現實差距(sim-to-real gap)的問題,難以完全模擬真實場景中的物理現象和復雜情況。目前開源的機器人數據集質量參差不齊,缺乏統一的數據采集基準,無法滿足跨場景、跨任務的通用機器人訓練需求。
模型能力局限:現有的多模態大模型在語言、視覺、觸覺等多模態融合感知方面仍處于發展階段,融合能力尚淺,難以支撐機器人在開放場景中的穩定運行。在復雜環境和長周期任務執行中,模型的知識轉移和泛化能力不足,任務規劃器難以適應通用場景,導致機器人在面對新情況時表現不佳。
技術路線不確定性:具身智能領域目前技術路線眾多,如分層模型和端到端模型等,每種技術路線都有其優勢和局限性,尚未形成明確的主導技術路線。這使得企業和研究機構在技術研發方向的選擇上存在一定困惑,增加了研發風險和成本。
硬件性能與成本平衡:高性能硬件是具身智能的基礎,但高性能往往意味著高成本。如何在性能和成本之間找到平衡點,是具身智能大規模商業化面臨的重要挑戰。未來 2-5 年,端到端具身 AI 模型將至關重要,同時需要更低成本、更持久的硬件支持。
倫理與安全問題:在商用和家用服務場景中,機器人的 “失效成本” 極高。一旦發生故障或行為異常,可能會對人員安全和財產造成嚴重損害。因此,確保機器人的安全性和符合倫理道德規范成為具身智能發展必須解決的重要問題,需要建立完善的技術標準和監管機制。
5.2 產業挑戰
產業鏈協同不足:具身智能產業鏈涉及多個環節,從上游的硬件供應到中游的軟件開發再到下游的應用場景,各環節之間的協同合作仍有提升空間。目前,產業鏈各環節公司在技術開發中存在 “重復造輪子” 的現象,導致資源浪費和效率低下。
標準體系不完善:具身智能領域的技術標準和規范尚未完全建立,不同企業的產品和技術之間兼容性差,制約了產業的規模化發展。建立統一的技術標準和評估體系,是推動具身智能產業健康發展的重要任務。
商業模式不明確:具身智能的商業模式仍在探索階段,如何實現技術價值的有效轉化,是企業面臨的重要挑戰。目前,大多數企業仍處于投入階段,尚未實現盈利,需要探索可持續的商業模式。
人才短缺:具身智能涉及多學科交叉,對人才的綜合素質要求極高。目前,具備 AI、機器人、材料科學等多領域知識的復合型人才嚴重短缺,制約了產業的發展。如何培養和吸引相關人才,是產業發展面臨的重要挑戰。
資本泡沫風險:隨著具身智能的熱度上升,資本大量涌入,存在一定的泡沫風險。部分頭部本體公司被給予較高的估值和溢價,導致資源閑置;同時,部分資源配置與行業發展階段錯配,可能影響產業的長期健康發展。
5.3 發展機遇
政策支持力度加大:2025 年,具身智能首次被寫入國務院政府工作報告,標志著其正式進入國家戰略規劃。北京、深圳、上海等 20 多個城市已明確將具身智能列為重點發展方向,并出臺了一系列支持政策。例如,北京提出要培育千億級產業集群,深圳提出到 2027 年具身智能機器人產業集群相關企業超過 1200 家。
市場需求增長:隨著人口老齡化、勞動力成本上升等因素影響,市場對具身智能的需求日益增長。在工業制造、醫療健康、養老服務等領域,具身智能能夠有效提高生產效率、降低成本、改善服務質量,市場前景廣闊。
技術突破加速:隨著 AI 大模型、傳感器技術、運動控制等領域的技術突破,具身智能的性能不斷提升,應用場景不斷拓展。例如,北京人形機器人創新中心研發的機器人可以完成 0.1 毫米級精密裝配作業,標志著我國在具身智能領域跨入 “動態穩定 + 高精度操作” 新階段。
產業鏈成熟:具身智能產業鏈正逐步完善,從上游的硬件供應到中游的軟件開發再到下游的應用場景,各環節的技術水平和產業化能力不斷提升。減速器、控制器、傳感器等國產化率提升至 45%,諧波減速器成本下降 30%,推動整機價格降至 10 萬元以下,為具身智能的大規模應用創造了條件。
國際合作空間擴大:具身智能是全球性的前沿科技領域,國際合作空間廣闊。中國企業可以通過與國際領先企業和研究機構合作,引進先進技術和經驗,提升自身競爭力。同時,中國在應用場景創新、產業化等方面的經驗也可以為全球具身智能的發展提供借鑒。
5.4 未來發展趨勢
(一)技術融合加速
具身智能將與更多技術領域深度融合,如自動駕駛、虛擬現實、元宇宙等。例如,自動駕駛與具身智能在技術實現路徑上高度相似,均包含 “感知 - 決策 - 規劃 - 控制” 的算法架構,兩者的技術可以相互借鑒和遷移。此外,具身智能與虛擬現實(VR)/ 增強現實(AR)技術的結合,將為人機交互帶來新的方式,操作人員能夠身臨其境地感受機器人所處環境,并通過手勢、語音等自然交互方式向機器人下達指令。
(二)端到端模型成為主流
未來,端到端大模型將成為具身智能的主流技術路線。端到端大模型能夠直接實現從人類指令到機械臂執行,即輸入圖像及文本指令,輸出夾爪末端動作,無需復雜的中間處理環節。隨著數據的不斷積累和技術的迭代,端到端大模型的性能將不斷提升,推動具身智能向更加智能化、通用化的方向發展。
(三)場景應用深化
具身智能將在更多領域實現深度應用,從工業制造、醫療健康到家庭服務、教育娛樂等,應用場景將不斷拓展。未來,具身智能產品將在以下領域實現突破:
- 工業 4.0:人機協作從單一工序向全流程滲透,如汽車制造中機器人自主完成焊接、涂裝、總裝。
- 銀發經濟:養老陪護機器人集成健康監測、跌倒報警、情感交互功能,緩解護工短缺壓力。
- 特種作業:消防、核電站巡檢等高風險場景中,機器人替代人工執行任務,結合數字孿生實現遠程操控。
(四)產業生態完善
具身智能的產業生態將逐步完善,形成更加開放、協同的發展格局。未來,產業生態將呈現以下特點:
- 標準化推進:2025 年全球具身智能技術標準體系預計初步建立,2027 年中國具身智能產業生態將實現全面協同。
- 平臺化發展:通用的具身智能平臺將成為產業發展的重要支撐,如北京人形機器人創新中心的 “慧思開物” 平臺,實現了單個軟件系統在機械臂、人形機器人等不同構型上的兼容。
- 生態聯盟形成:企業間將通過建立創新聯合體、產業聯盟等形式,實現資源共享、優勢互補,共同推動產業發展。
市場規模快速增長:具身智能市場規模將保持快速增長態勢。據中研普華預測,2025 年中國具身智能市場規模將突破 9731 億元,2030 年有望達 4 萬億元。另據預測,2025-2030 年,中國具身智能行業市場規模預計從 5000 億元增長至 1.5 萬億元,年均增長率保持在 25% 以上。具身智能產業規模將達萬億元級,推動產業從 “數字化” 向 “智能化” 躍遷。
六、結論與展望
6.1 研究結論
(一)產業發展進入快車道
具身智能作為人工智能領域的前沿方向,正從技術驗證邁向實際應用,并深度融入各類實體場景,展現出廣闊的產業革新潛力。2025 年,具身智能首次被寫入國務院政府工作報告,標志著其正式進入國家戰略規劃。北京、深圳、上海等 20 多個城市已明確將具身智能列為重點發展方向,并出臺了一系列支持政策,產業發展進入快車道。
(二)產業鏈初步形成
我國已形成了較為完整的具身智能產業鏈,涵蓋上游的芯片、傳感器、控制器等硬件設備,中游的 AI 算法、大模型、操作系統等軟件系統,以及下游的人形機器人、工業機器人、服務機器人等產品和應用場景。產業鏈各環節的技術水平和產業化能力不斷提升,為產業發展提供了有力支撐。
(三)技術創新成果顯著
我國在具身智能領域取得了一系列技術創新成果。例如,北京人形機器人創新中心研發的 “慧思開物” 平臺,實現了單個軟件系統在機械臂、人形機器人等不同構型上的兼容;星動紀元的人形機器人 “星動 STAR1” 打破了電驅人形機器人奔跑速度的世界紀錄;浙江人形機器人創新中心自主研發的機器人可以完成 0.1 毫米級精密裝配作業等。這些成果表明,中國在具身智能領域已跨入 " 動態穩定 + 高精度操作 " 新階段。
(四)市場規模快速增長
具身智能市場呈現快速增長態勢。2024 年,中國具身智能市場規模達 8634 億元,同比增長65%。預計 2025 年市場規模將突破 9731 億元,2030 年有望達 4 萬億元。另據預測,2025-2030 年,中國具身智能行業市場規模預計從 5000 億元增長至 1.5 萬億元,年均增長率保持在 25% 以上。
(五)國際競爭格局呈現新態勢
全球具身智能領域的競爭格局正在形成。截至 2025 年 4 月 9 日,中國具身智能專利申請超 21.99 萬件,位居全球第一,占全球申請量約 26.45%。然而,中國雖然在專利申請數量上領先,但與第二名的美國相差不足 10%;且從專利申請人維度來看,全球排名前十的專利申請人,主要來自日本、韓國、美國。這表明,中國在具身智能領域雖然取得了長足進步,但在核心技術和基礎研究方面仍需加強。
6.2 未來展望
(一)技術發展趨勢
- 端到端模型成為主流:未來,端到端大模型將成為具身智能的主流技術路線,特別是 VLA(視覺 - 語言 - 動作)模型將得到廣泛應用。
- 多模態融合深入:具身智能將實現視覺、聽覺、觸覺等多種感知能力的深度融合,提升機器人在復雜環境中的適應性和交互體驗。
- 輕量化與高效化:具身智能將向輕量化、高效化方向發展,通過模型壓縮、硬件加速等技術,提升系統的實時性和能效比。
- 自主學習能力增強:隨著強化學習、模仿學習等技術的發展,具身智能的自主學習能力將不斷增強,能夠通過與環境的交互不斷優化自身行為。
(二)產業發展趨勢
- 產業規模持續擴大:具身智能產業規模將持續擴大,預計 2030 年中國市場規模將達 4 萬億元。
- 產業生態更加完善:具身智能的產業生態將逐步完善,形成更加開放、協同的發展格局。標準化、平臺化、生態聯盟將成為產業發展的重要特征。
- 應用場景不斷拓展:具身智能的應用場景將不斷拓展,從工業制造、醫療健康到家庭服務、教育娛樂等領域,將實現全方位滲透。
- 國際合作與競爭并存:具身智能是全球性的科技領域,國際合作與競爭將并存。中國企業將積極參與國際競爭,推動中國技術和產品 “走出去”。
(三)社會影響展望
- 生產方式變革:具身智能將推動生產方式變革,實現生產過程的智能化、柔性化和自動化,提高生產效率,降低成本。
- 生活方式改變:具身智能將深刻改變人們的生活方式,為人們提供更加便捷、智能的生活服務。未來,機器人可能會成為家庭中的陪伴者,工作中的合作者,甚至是探索未知世界的先鋒。
- 就業結構調整:具身智能的發展將導致就業結構調整,部分傳統崗位可能被自動化設備替代,同時也將創造大量新的就業機會,如機器人研發、維護、管理等。
- 社會治理創新:具身智能將為社會治理提供新的手段和方法,提升社會治理的精準性和有效性。例如,在城市管理、公共安全等領域,具身智能可以發揮重要作用。
6.3 戰略建議
(一)企業層面
- 明確戰略定位:企業應根據自身優勢,明確在具身智能產業鏈中的定位,專注于特定的細分領域,形成差異化競爭優勢。
- 加強技術創新:企業應加大研發投入,加強技術創新,特別是在 AI 大模型、傳感器技術、運動控制等核心技術領域,提升核心競爭力。
- 推動場景落地:企業應積極推動具身智能在特定場景的落地應用,通過解決實際問題,實現技術價值的有效轉化。
- 構建產業生態:企業應積極參與產業生態建設,與產業鏈上下游企業建立合作關系,共同推動產業發展。
(二)政府層面
- 完善政策體系:政府應進一步完善具身智能的政策體系,從研發支持、產業化、應用推廣等方面形成全方位的政策支持。
- 加強基礎設施建設:政府應加強具身智能相關的基礎設施建設,如算力基礎設施、數據中心等,為產業發展提供支撐。
- 促進人才培養:政府應加強具身智能領域的人才培養,支持高校設立相關專業,培養復合型人才。
- 推動國際合作:政府應推動國際合作,搭建國際合作平臺,促進技術、人才、資金等要素的國際流動。
(三)社會層面
- 加強科普教育:社會應加強具身智能的科普教育,提高公眾對具身智能的認知和理解,促進技術的普及和應用。
- 關注倫理安全:社會應關注具身智能的倫理和安全問題,建立健全相關法律法規和倫理規范,確保技術的健康發展。
- 適應變革:社會應積極適應具身智能帶來的變革,調整就業結構,完善社會保障體系,確保社會的穩定和發展。
具身智能作為人工智能領域的前沿方向,正從技術驗證邁向實際應用,并深度融入各類實體場景,展現出廣闊的產業革新潛力。未來,隨著技術的不斷進步和應用場景的不斷拓展,具身智能將深刻改變人們的生產生活方式,推動社會的智能化發展進程。我們有理由相信,在政策支持、技術創新和市場需求的共同推動下,中國具身智能產業將迎來更加廣闊的發展前景。




![[CISCN2019 華北賽區 Day1 Web1]Dropbox](http://pic.xiahunao.cn/[CISCN2019 華北賽區 Day1 Web1]Dropbox)



:圖像輪廓)
函數參數類型問題解決)


)




)

