我們在GNSS抗干擾天線的選型、測試方法以及為什么不能做RTK?(抗干擾內容全集)中提到的抗干擾天線,針對的是GPS壓制式干擾。對于GPS欺騙式干擾,抗干擾天線是無能為力的。
簡單來說,壓制式干擾是通過發射強功率的噪聲信號,把真實的GPS信號淹沒,最終使得GPS接收機不能正常定位。
欺騙式干擾恰恰相反,欺騙式干擾的發射功率一般都比較低,實際工程要求:欺騙信號功率需比真實信號高?3-10 dB。
欺騙式干擾是生成一種虛假的信號。這種虛假的信號從信號格式、相位關系上看起來和真實的GPS信號完全相同。GPS接收機接收到這種虛假信號之后,會被誘騙并鎖定到虛假信號上,從而導致GPS接收機計算出一個錯誤的位置、速度和時間。
而這個錯誤的位置、速度和時間正是攻擊者期望的。
欺騙式干擾的三階段工作流程
欺騙式干擾一般包括三個核心技術步驟:
-
?信號同步與鎖定:
偽造欺騙性GPS信號的第一步是完整捕捉真實GPS信號并提取其信息:
-
? 干擾發生器自帶GPS接收機,能夠接收空中GPS信號;
-
? 捕捉并復制信號中的:
-
? 衛星PRN碼(偽隨機碼)
-
? 載波頻率
-
? 導航電文內容(星歷、時間、軌道參數)
-
開始階段,干擾器生成的信號功率非常低,避免引起接收機注意。
2.?功率壓制與無縫接管:
干擾器逐步提升生成信號的功率:
-
? 通常要求比真實GPS信號高出?3~10 dB;
-
? 根據經驗:
-
? 初始階段:比真實信號高0~1 dB
-
? 接管階段:提升至真實信號+6 dB
-
? 穩定階段:維持+3 dB
-
? 上限不超過接收機AGC(自動增益控制器)的閾值(通常為+15 dB)
-
由于GPS接收機默認“鎖定最強信號”。由于欺騙信號與真實信號結構一致、碼相位同步,接收機會自動切換至欺騙信號,而不會失鎖也不會發出告警。
這個過程是無縫的、隱蔽的。
3.?誘導“漂移”,欺騙數據注入 :
一旦GPS接收機鎖定在欺騙信號上,干擾發射器就可以逐漸“牽引”其解算結果:
-
? 微調碼相位 ? 偽造偽距 ? 改變位置
-
? 修改電文中的星歷信息 ? 讓接收機“相信”衛星在別處
-
? 操控多普勒頻率 ? 欺騙速度和方向
這個“誘導”的過程非常緩慢和平滑,以避免觸發GPS接收機內部的合理性檢查算法:
-
? 接收機的速度/加速度異常檢測算法
-
? RAIM(接收機自主完好性監控)機制
-
? 電文一致性校驗邏輯
從而讓無人機在毫不知情的情況下,按照干擾發生器設定的軌跡飛行。
舉個現實場景的例子:
無人機在高空飛行,地面干擾器逐漸“牽引”它的導航數據,讓它“以為”自己偏離了航向,從而引導其進入指定區域降落或偏離航線 —— 無人機毫無覺察,甚至仍在上報“正常運行”。
為什么簡單的“射頻轉發式干擾”無效
很多人誤以為,使用射頻轉發器就能實現GPS欺騙。
射頻轉發器的基本原理是:室外天線接收微弱的GPS衛星信號,通過線纜傳輸至室內的主機進行放大和濾波,再通過室內天線將增強后的信號發射出去。用于室內的GPS接收機定位。
如果把射頻轉發器搬到室外,GPS接收機既能接收真實GPS信號,又能接收轉發器的信號,那么GPS接收機會被轉發器的信號欺騙嗎?
答案是:正常的GPS接收機不會被轉發器發射的信號欺騙。
原因很簡單,因為GPS射頻轉發器的功能是“接收-放大-濾波-發射”,整個過程(從室外接收天線到室內發射天線)存在一個固定的系統延遲T。
GPS信號經過轉發器之后,傳播延時比直達信號增加了這個固定延遲T。假設轉發器的延時是100ns,相當于經過轉發器的每一路衛星信號,在接收機看來,偽距都被認為增加了30m。
我們在GNSS接收機的定位合集:定位原理,誤差來源,定位精度分析中介紹過GPS接收機定位原理,GPS接收機會用被“集體拉長30m”的偽距去解算方程組,

定位方程
由于存在固定延遲T,所有偽造衛星信號的偽距都被同等增大了約30米。這種‘**共性誤差’**在定位解算中,在定位解算的時候,接收機會將這種“整體漂移”歸為自身時鐘偏差,導致定位結果出現一個巨大的、不連續的位置跳變或者時間跳變。
具備RAIM(接收機自主完好性監測)功能的GPS接收機很容易檢測到這種所有衛星同時出現的異常,從而觸發告警并丟棄定位結果。
因此,這種簡單的轉發式干擾,對大多數現代接收機是無效的。
成功欺騙GPS接收機所需的信號特征
要讓GPS接收機信以為真,虛假的欺騙信號具備具備一下的關鍵特征:
-
? 功率略高于真實GPS信號
欺騙信號在GPS接收機天線處的功率必須顯大于真實GPS信號,但也不過分地高于真實的GPS信號,否則會被GPS接收機的AGC功能檢測出來;
-
? 信號結構一致
欺騙信號的結構必須與真實的GPS信號的結構完全一致。這里主要包括
????????- 偽隨機碼一致
????????- 導航電文的調制格式,數據幀結構,電文所在的位置一致;
????????- 載波頻率一致
-
? 欺騙信號的碼相位和真實信號的碼相位偏差非常小
這是成功“接管”GPS接收機跟蹤環路的關鍵。欺騙信號的碼相位和真實信號的碼相位的初始偏差必須非常小,否則會導致GPS接收機失鎖或者沒法接管GPS接收機。工程上要求:
| 偏差量級 | 接收機響應 |
| >0.3碼片 | 相關器無法鎖定 |
| 0.1-0.3碼片 | 可能引起失鎖告警 |
| <0.1碼片 | 可無縫接管 |
-
? 時空一致性
干擾發生器偽造的多個(比如6個,8個)GPS衛星信號必須指向同一個(錯誤的)時空點,否則會被識別為矛盾數據而被剔除。
此外,虛擬信號的多普勒頻移也必須符合這個虛假運動狀態的物理規律,否則觸發異常速度檢測。
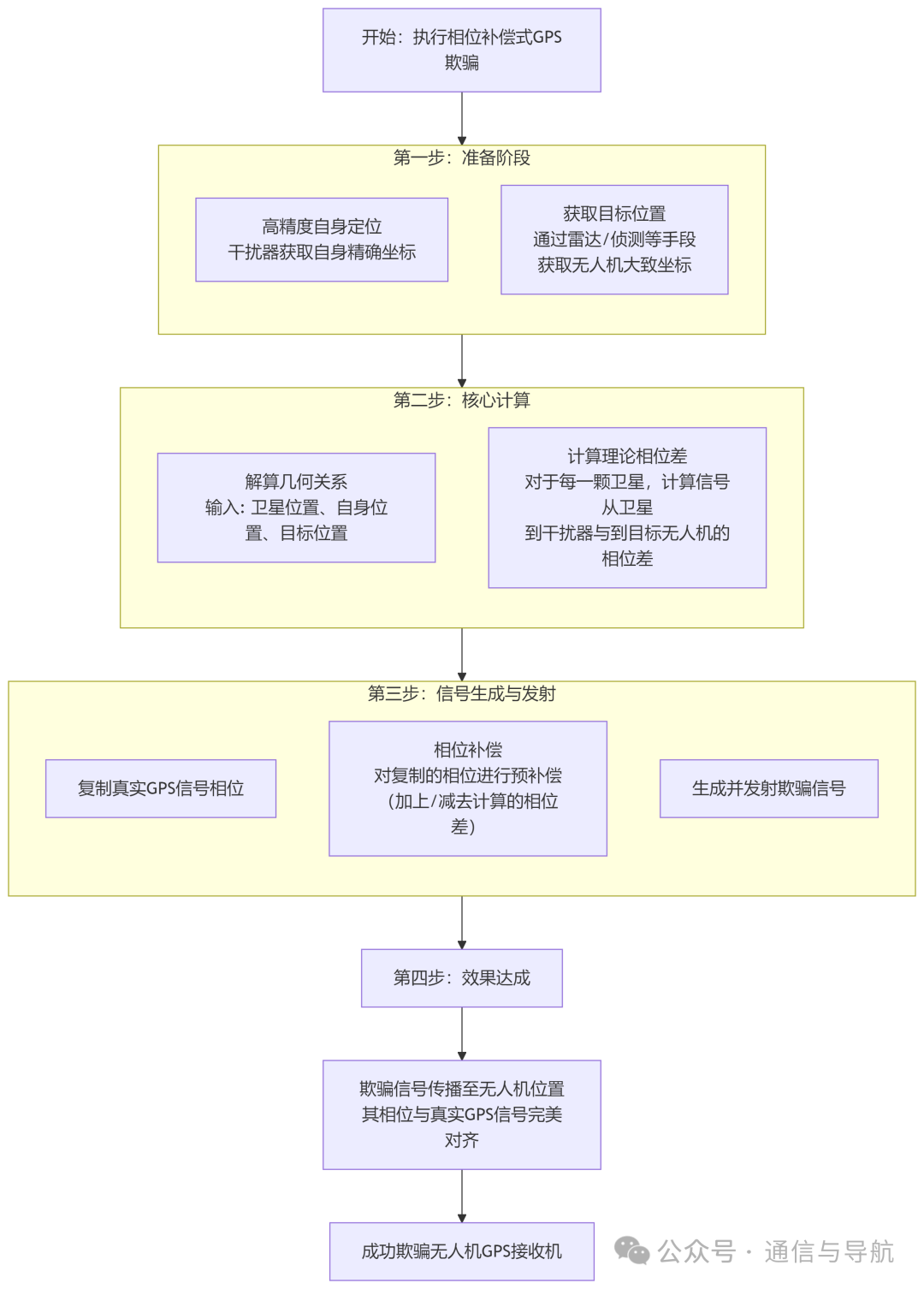
空間距離影響下的欺騙策略
如果干擾發生器與目標設備(如無人機)有一定距離,必須考慮空間傳播路徑對信號的影響,干擾發生器必須主動計算并補償兩者之間的空間相位差。
實現方式:
1.?高精度自身定位:干擾發生器必須首先通過某首先獲得自己的高精度位置坐標。
2.?獲取目標位置:通過雷達、無線電測向或其他偵測手段,實時獲取目標無人機的高精度位置。這個是欺騙式干擾的難點和關鍵點,獲取的目標位置精度越差,后續相位補償的誤差就越大,欺騙成功的概率就越低。
3.?解算幾何關系:利用已知的衛星位置(從導航電文中獲得)、自身的精確位置和無人機的大致位置,實時計算出對于每一顆衛星,信號在干擾發生器位置和無人機位置之間的理論相位差。
4.?相位補償?:在生成欺騙信號時,干擾發生器不再是簡單復制它接收到的相位,而是在復制的相位基礎上,主動地加上或減去一個經過計算的相位補償值。
5.?精確同步:經過這樣“相位補償”之后的欺騙信號,在經過一段距離的傳播、到達無人機位置時,其攜帶的相位恰好就能與那一瞬間到達無人機的真實GPS信號相位完美對齊。
6. 從而達到了欺騙無人機上GPS接收機的目的。
信號的工作流程如下:
?
總結
GPS欺騙的核心在于:
1.?不摧毀接收機,而是“誘導”它接收錯誤的信息;
2.?欺騙信號在形式上與真信號幾乎不可分辨;
3.?接收機不會失鎖、不會報警、繼續輸出“正常但錯誤”的數據;
4.?攻擊者可以遠程操控設備行為,甚至實施“軟劫持”;
5.?檢測困難、防御門檻高,普通抗干擾天線無效
碼字不易,大家覺得文章不錯,就安排一下一鍵三連吧:點贊、分享、推薦。
推薦閱讀:
GNSS抗干擾天線的選型、測試方法以及為什么不能做RTK?(抗干擾內容全集)
GNSS接收機的定位合集:定位原理,誤差來源,定位精度分析
![[PV]AXI R/W/RW帶寬計算的tcl腳本](http://pic.xiahunao.cn/[PV]AXI R/W/RW帶寬計算的tcl腳本)

)











技術的發展歷史)




