在農業巡查、環保監測、安防布控等廣闊天地,無人機(UAV)早已超越了“拍照打卡”的酷炫標簽,成為不可或缺的智能之眼。然而,當計算機視覺模型從地面“抬頭”望向無人機視角時,迎接它的卻是截然不同的挑戰:目標更小、分布更密集、背景變化更復雜。
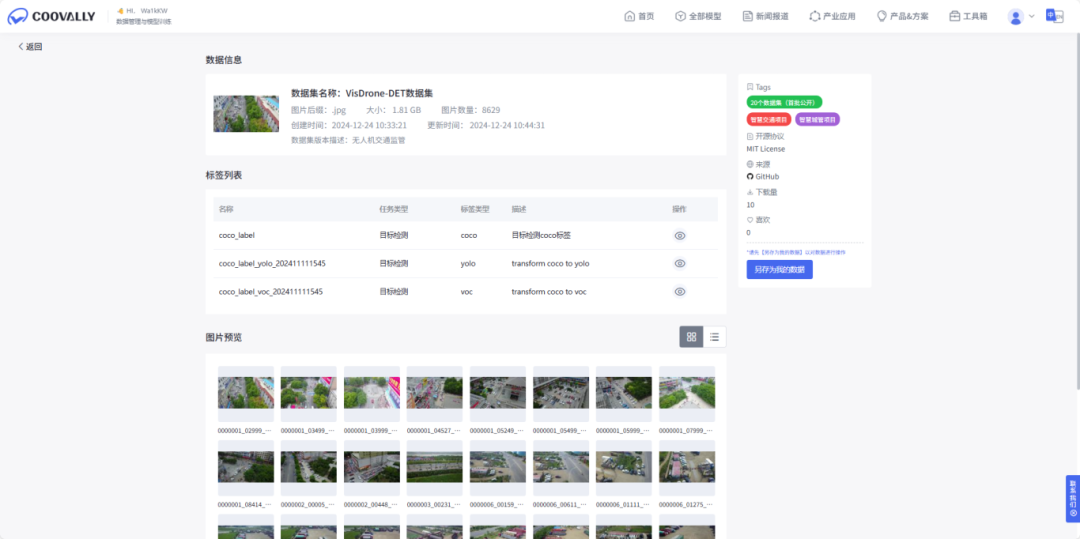
地面視角的數據集雖已汗牛充棟,但專為“上帝視角”量身定制的優質數據集,才是攻克這些難題的關鍵。今天,我們隆重介紹一個在無人機視覺領域經典且實用的標桿數據集——VisDrone-DET數據集。
一、無人機視覺崛起,呼喚專屬“彈藥庫”
隨著配備高清攝像頭的無人機在智慧農業、航拍攝影、快速物流、智慧安防等領域的廣泛應用,自動化理解無人機采集的海量視覺數據變得至關重要。無人機視覺,也因此成為計算機視覺研究的前沿熱點與難點。
二、VisDrone應運而生,專為天空戰場打造!
VisDrone數據集,由天津大學機器學習與數據挖掘實驗室AISKYEYE團隊精心收集并發布。它專為解決無人機視角下的視覺任務而生:
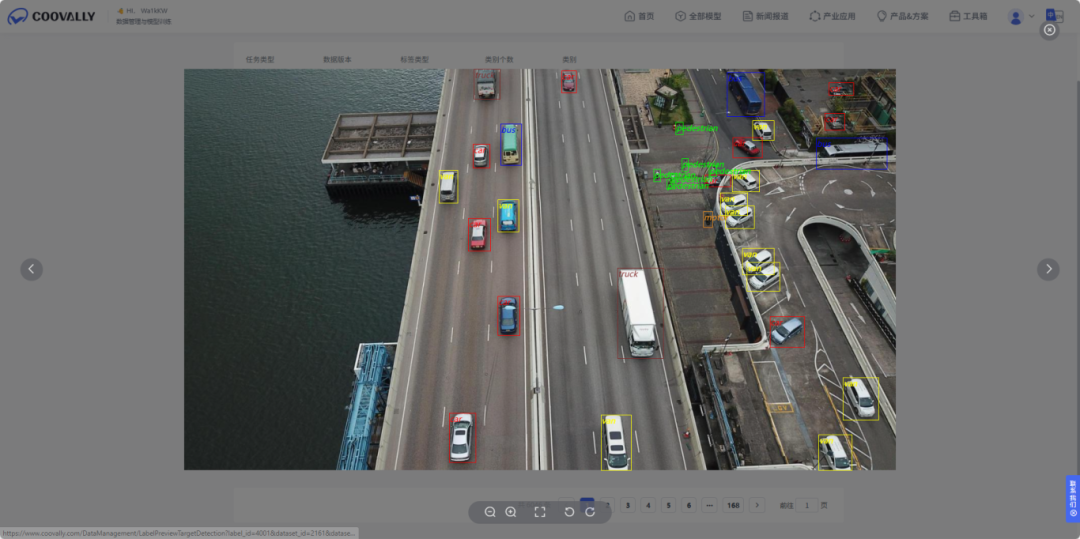
視角真實:?所有數據均由不同型號無人機搭載的攝像頭實際捕獲,高度還原真實應用場景的復雜性。
覆蓋廣泛:
地理跨度:采集自中國14個不同城市,相距數千公里,地域差異顯著。
環境多樣:涵蓋城市高樓林立與鄉村開闊田野等多種環境。
條件多變:包含晴天、陰天以及不同光照條件下的場景。
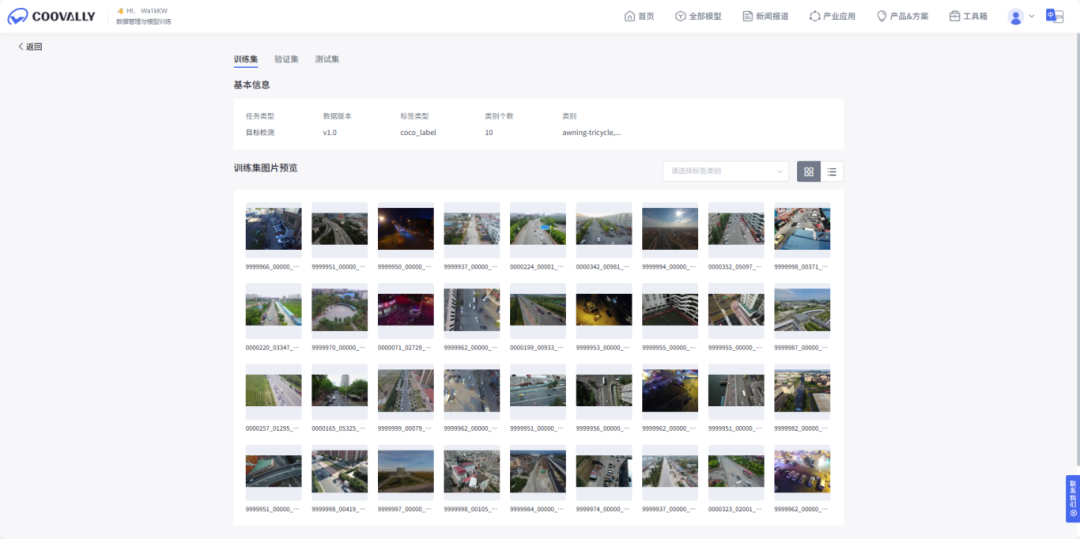
目標豐富:聚焦行人、車輛(汽車)、自行車、三輪車等典型目標。
密度挑戰:同時包含稀疏目標場景和極度擁擠的場景。
規模龐大,標注精細:
包含10,209張高質量靜態圖像。
包含288個視頻片段(總計261,908幀)。
超過260萬個目標被精細標注(邊界框)!
更提供場景可見性、目標類別、遮擋程度等關鍵屬性信息,極大提升數據的科研與應用價值。
三、VisDrone的核心價值:直面真實挑戰
VisDrone絕非簡單的圖片集合。它精準捕捉了無人機視覺應用中的核心痛點:
微小目標檢測難: 高空視角下,行人、車輛等目標像素占比大幅縮小。
密集場景易漏檢誤檢: 交通樞紐、集市等人車密集區域,目標重疊、遮擋嚴重。
復雜背景干擾大: 城市建筑群、鄉村自然景觀變化多端,干擾模型判斷。
光照天氣變化適應難: 不同時段、不同天氣下的成像效果差異顯著。
這些由真實世界帶來的挑戰,使得VisDrone成為訓練和評估目標檢測、多目標跟蹤等算法性能的黃金標準與試金石。
開箱即用,助力研究與應用
VisDrone數據集現已在Coovally平臺上整理就緒!
格式兼容:標簽格式已完美兼容YOLO等主流檢測框架,開箱即用,省去繁瑣轉換。
一鍵調用:在Coovally平臺,您可以輕松獲取這份寶貴的資源。
平臺鏈接:https://www.coovally.com
四、不止VisDrone:Coovally——您的AI資源寶庫
如果您計劃使用VisDrone進行模型訓練、測試或實際應用部署,Coovally平臺將是您的強大后盾:
海量資源整合:?平臺匯聚了國內外開源社區超過1000+先進模型算法及豐富的公開識別數據集。
高效便捷:?無論是前沿模型還是所需數據集,均可實現一鍵調用,極大提升您的研發效率,加速從實驗研究到產業落地的進程。
結論:連接理論與實踐的空中橋梁
VisDrone不僅是一個大規模、高質量、場景豐富的無人機視覺數據集,更是架設在計算機視覺前沿研究與真實世界復雜應用之間的一座重要橋梁。
如果你正在尋找一個能真實反映無人機視角下目標檢測與跟蹤挑戰的數據集,或是希望驗證算法在復雜多變環境下的魯棒性,VisDrone無疑是您深入探索和實踐的優選!
后續我們將持續分享更多優質數據集、前沿開源項目及實戰訓練心得。關注我們,一起探索無人機視覺的無限可能!
讓視覺與飛行深度交融,開啟智能感知新高度!
?)








Jetson Nano 系統Ubuntu22.04安裝ROS 2 Humble版本)




-PingInfoView)




