為什么需要批量規范化層呢?
讓我們來回顧一下訓練神經網絡時出現的一些實際挑戰:
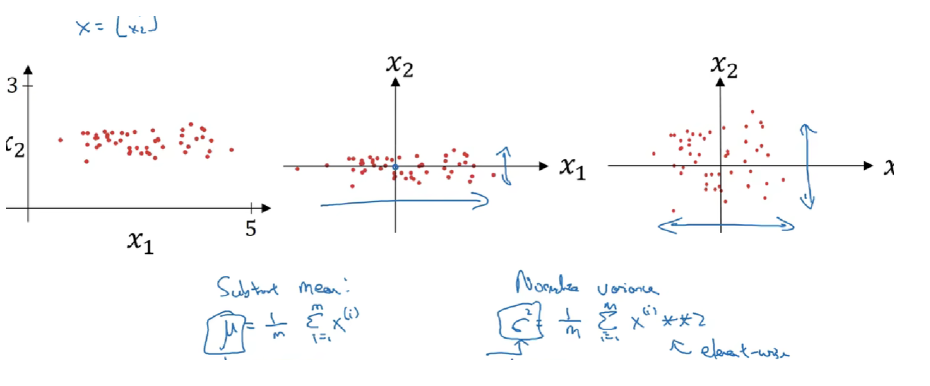
首先,數據預處理的方式通常會對最終結果產生巨大影響。 回想一下我們應用多層感知機來預測房價的例子。使用真實數據時,我們的第一步是標準化輸入特征,使其平均值為0,方差為1。 直觀地說,這種標準化可以很好地與我們的優化器配合使用,因為它可以將參數的量級進行統一。
第二,對于典型的多層感知機或卷積神經網絡,當我們訓練時,中間層中的變量(例如,多層感知機中的仿射變換輸出)可能具有更廣的變化范圍:不論是沿著從輸入到輸出的層,跨同一層中的單元,或是隨著時間的推移,模型參數的隨著訓練更新變幻莫測。 批量規范化的發明者非正式地假設,這些變量分布中的這種偏移可能會阻礙網絡的收斂。 直觀地說,我們可能會猜想,如果一個層的可變值是另一層的100倍,這可能需要對學習率進行補償調整。
第三,更深層的網絡很復雜,容易過擬合。 這意味著正則化變得更加重要。
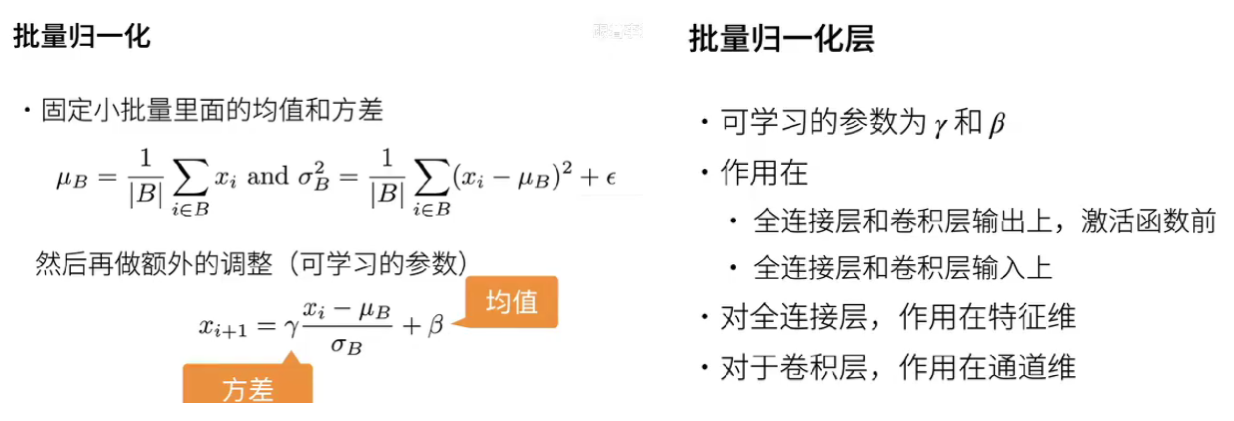
批量規范化應用于單個可選層(也可以應用到所有層),其原理如下:
在每次訓練迭代中,我們首先規范化輸入,即通過減去其均值并除以其標準差,其中兩者均基于當前小批量處理。 接下來,我們應用比例系數和比例偏移。 正是由于這個基于批量統計的標準化,才有了批量規范化的名稱。
BatchNorm 在 一個 batch 的同一通道 內做歸一化
LayerNorm 在 每條樣本的 所有通道/特征 內做歸一化
作用:把輸入分布強行壓成 零均值、單位方差,減輕 Internal Covariate Shift 內部協變量偏移,使優化曲面更平滑,從而讓梯度更穩定、訓練更快、更易收斂到較優的泛化解。
計算例子
下面用 3×4 的 RGB 小批次張量舉例,并給出計算過程與差異對照:
數據形狀約定:設輸入 x 形狀為 (B, C, H, W) = (2, 3, 2, 2):
2 張圖片
3 個通道 (R, G, B)
每通道 2×2 像素
把每張圖片展平后,張量變成:
batch0-0R: [[1, 3], [5, 7]] → 4 個標量 1 3 5 7G: [[2, 4], [6, 8]] → 2 4 6 8B: [[0, 2], [4, 6]] → 0 2 4 6batch0-1R: [[2, 4], [6, 8]]G: [[3, 5], [7, 9]]B: [[1, 3], [5, 7]]BatchNorm 的計算:BN是在同一個batch中不同樣本之間的同一位置的神經元之間進行歸一化。
歸一化維度:在 (B, H, W) 三個維度上求均值/方差,每個通道一組統計量。
以 R 通道為例: 共有 2×2×2 = 8 個像素值:{1, 3, 5, 7, 2, 4, 6, 8}
μ_R = (1+3+5+7+2+4+6+8)/8 = 4.5
σ2_R = 平均((x?4.5)2) = 5.25
歸一化后每個像素先做 (x?μ)/√(σ2+ε),再進行 γ·x + β 的仿射。 G、B 通道同理,各自獨立擁有一組 μ、σ、γ、β。
參數:每個通道一對 (γ, β),共 3×2 = 6 個可學習標量。
推理階段:用滑動平均保存的全局 μ、σ,不再依賴 batch。
LayerNorm 的計算:LN是在同一個樣本中不同神經元之間進行歸一化。
歸一化維度:在 (C, H, W) 三個維度上求均值/方差,每條樣本一組統計量。
以 batch-0 為例: 把 3×2×2 = 12 個數拉成一條向量: {1, 3, 5, 7, 2, 4, 6, 8, 0, 2, 4, 6}
μ = 4.0
σ2 = 平均((x?4)2) = 5.0
歸一化后再用 該樣本獨有 的 γ、β 做仿射。 batch-1 同理,用 batch-1 自己的 12 個數重新算 μ、σ。
參數:每條樣本一對 (γ, β),可共享或不共享,與 BatchNorm 不同。
為什么有效?
輸入:手寫數字灰度圖,只保留 2 個像素 → 輸入 x 形狀 (batch, 2)。
網絡:2 層線性 y = W? ReLU(W?x)。
任務:二分類 0/1,用 Sigmoid + BCE 損失。
假設 batch = 4,像素值如下(故意把范圍拉大):
x = [[200, 190],[10, 5],[180, 170],[8, 4]]真實標簽 y = [0,? 1,? 0,? 1]
沒有歸一化時(裸網絡)
第一層輸出 z? = W?x,假設 W? 隨機初始化后, z? 的均值≈180,方差≈6000。
經過 ReLU 后,大多數值落在 0 或 >100 的區間 → 梯度在反向傳播時: – 很大值那一端 → 梯度爆炸; – 很多 0 → 梯度消失。 結果:Loss 震蕩劇烈,訓練 10 個 epoch 仍降不下來。
加上 BatchNorm(放在第一層之后):
計算 batch 內每個通道的均值 μ、方差 σ2:
μ? = (200+10+180+8)/4 = 99.5
μ? = (190+5+170+4)/4 = 92.25
歸一化:
?? = (z? ? μ?)/√(σ?2+ε)
?? = (z? ? μ?)/√(σ?2+ε)
現在所有值縮放到 ≈[-1,1] 區間。
再乘可學習 γ、β 做仿射,保持表達能力。
效果:
第一層輸出方差≈1,ReLU 后的分布不再極端。
反向傳播時梯度大小穩定,loss 單調下降,3 個 epoch 就收斂。
加上 LayerNorm(放在第一層之后)
對每條樣本的所有特征一起算 μ、σ2:
樣本 0:μ = (200+190)/2 = 195
樣本 1:μ = (10+5)/2 = 7.5
…………
每條樣本內部做 (x?μ)/σ,再 γ、β。
效果:
即使 batch 大小變成 1 也能用(LN 不依賴 batch)。
輸入尺度被拉齊,梯度同樣穩定,收斂速度與 BN 相近。
比較點 | BatchNorm | LayerNorm |
歸一化范圍 | 跨 batch 的同一通道 | 單條樣本 內的全部特征 |
均值/方差維度 | (B, H, W) | (C, H, W) |
依賴 batch 大小 | 是(推理時用滑動平均) | 否 |
典型場景 | CNN、大 batch | RNN、Transformer、小 batch |
參數量 | 每通道一對 γβ | 每層/每樣本一對 γβ |
因此:
在 CNN 里用 BatchNorm,你會看到“所有圖片的 R 通道一起歸一化”;
在 Transformer 里用 LayerNorm,你會看到“每個 token 的所有維一起歸一化”。
)

)












)


`與`pg.key.get_pressed()` ,二者有什么區別與聯系?)
