創建一個簡單的智能體(Agent)程序
在人工智能和自動化任務中,智能體(Agent)是指能夠感知環境并通過決策和行動來實現目標的實體。Python 提供了豐富的庫和框架,可以用于構建智能體程序,例如使用 pygame 進行圖形界面模擬,或者使用 numpy 和 random 進行環境建模。
以下是一個簡單的智能體程序示例,該智能體在一個二維網格環境中自主移動,尋找目標并完成任務。此程序使用了 numpy 來管理環境網格,并使用基本的搜索算法來實現智能體的決策能力。
import numpy as np
import random# 定義一個簡單的網格環境
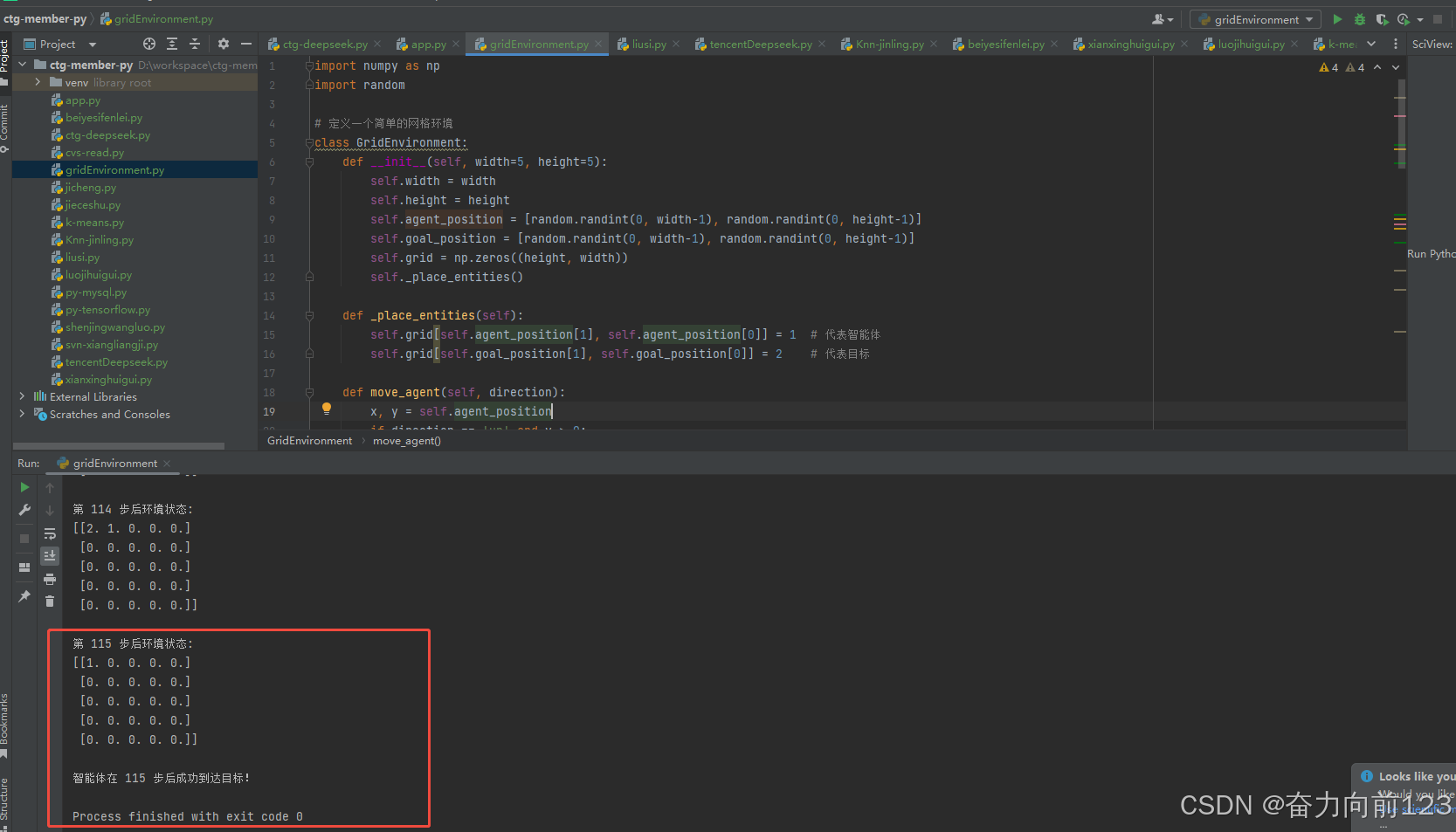
class GridEnvironment:def __init__(self, width=5, height=5):self.width = widthself.height = heightself.agent_position = [random.randint(0, width-1), random.randint(0, height-1)]self.goal_position = [random.randint(0, width-1), random.randint(0, height-1)]self.grid = np.zeros((height, width))self._place_entities()def _place_entities(self):self.grid[self.agent_position[1], self.agent_position[0]] = 1 # 代表智能體self.grid[self.goal_position[1], self.goal_position[0]] = 2 # 代表目標def move_agent(self, direction):x, y = self.agent_positionif direction == 'up' and y > 0:self._update_position(x, y - 1)elif direction == 'down' and y < self.height - 1:self._update_position(x, y + 1)elif direction == 'left' and x > 0:self._update_position(x - 1, y)elif direction == 'right' and x < self.width - 1:self._update_position(x + 1, y)def _update_position(self, new_x, new_y):old_x, old_y = self.agent_positionself.grid[old_y, old_x] = 0self.agent_position = [new_x, new_y]self.grid[new_y, new_x] = 1def check_goal(self):return self.agent_position == self.goal_positiondef display(self):print(self.grid)# 定義一個簡單的智能體
class SimpleAgent:def __init__(self, environment):self.environment = environmentdef choose_action(self):directions = ['up', 'down', 'left', 'right']return random.choice(directions)def act(self):action = self.choose_action()self.environment.move_agent(action)# 主程序
if __name__ == "__main__":env = GridEnvironment()agent = SimpleAgent(env)print("初始環境:")env.display()steps = 0while not env.check_goal():agent.act()steps += 1print(f"\n第 {steps} 步后環境狀態:")env.display()print(f"\n智能體在 {steps} 步后成功到達目標!")
代碼解析
GridEnvironment 類:定義了一個二維網格環境,智能體和目標的位置隨機生成。該類提供了移動智能體、檢查目標是否到達以及顯示環境狀態的功能。
SimpleAgent 類:實現了一個簡單的智能體,隨機選擇移動方向。在實際應用中,可以使用更復雜的決策算法,如強化學習策略。
主程序:初始化環境和智能體,模擬智能體的移動過程,直到找到目標。
擴展建議
路徑規劃:可以引入 A* 算法或 Dijkstra 算法來實現更高效的路徑搜索。
強化學習:使用
gym或stable-baselines3等庫,訓練智能體通過強化學習來優化決策過程。圖形界面:使用
pygame或tkinter構建圖形化界面,使智能體的行為更加直觀。
還真能直接跑起來,不需要修改任何代碼


![[硬件電路-121]:模擬電路 - 信號處理電路 - 模擬電路中常見的難題](http://pic.xiahunao.cn/[硬件電路-121]:模擬電路 - 信號處理電路 - 模擬電路中常見的難題)
)


Text-IF:基于語義文本引導的退化感知交互式圖像融合方法)

)





![[學習筆記-AI基礎篇]03_Transfommer與GPT架構學習](http://pic.xiahunao.cn/[學習筆記-AI基礎篇]03_Transfommer與GPT架構學習)




