一、系統概述
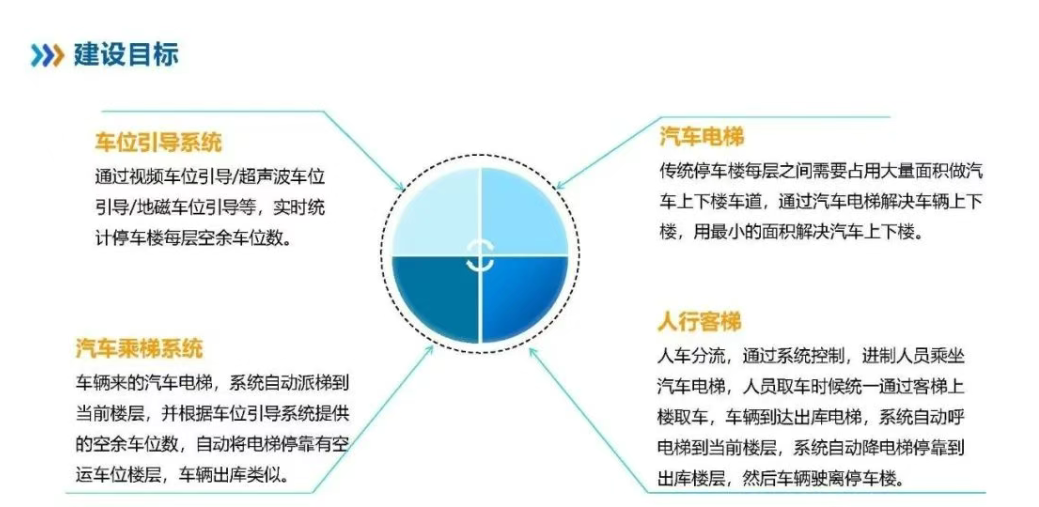
隨著城市土地資源日益緊張,立體停車、自動化停車成為發展趨勢。本方案圍繞“車位引導系統 + 汽車乘梯系統”構建智慧停車核心體系,結合地磁/視頻/超聲波檢測、AI識別、語音交互、電梯自動調度等先進技術,實現車輛入場、引導、停泊、離場全過程的智能化管理。
二、系統架構與模塊劃分
1. 車位引導系統(Parking Guidance System)
功能特點:
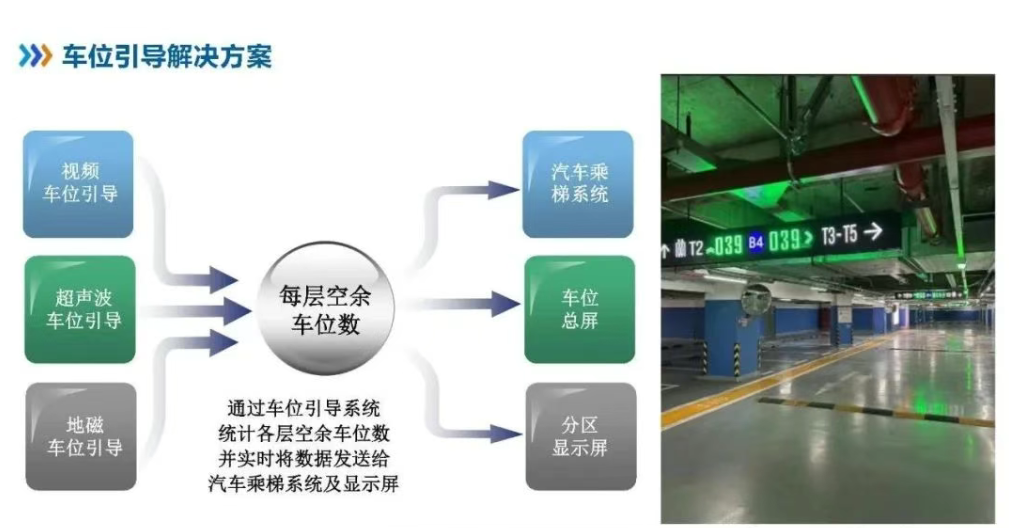
- 車位檢測技術:采用地磁傳感器、視頻識別(CV)、超聲波探頭等多種方式實時檢測車位占用狀態。
- 數據匯聚分析:每層樓部署數據采集模塊,匯總至中央控制系統,動態統計各層空余車位數。
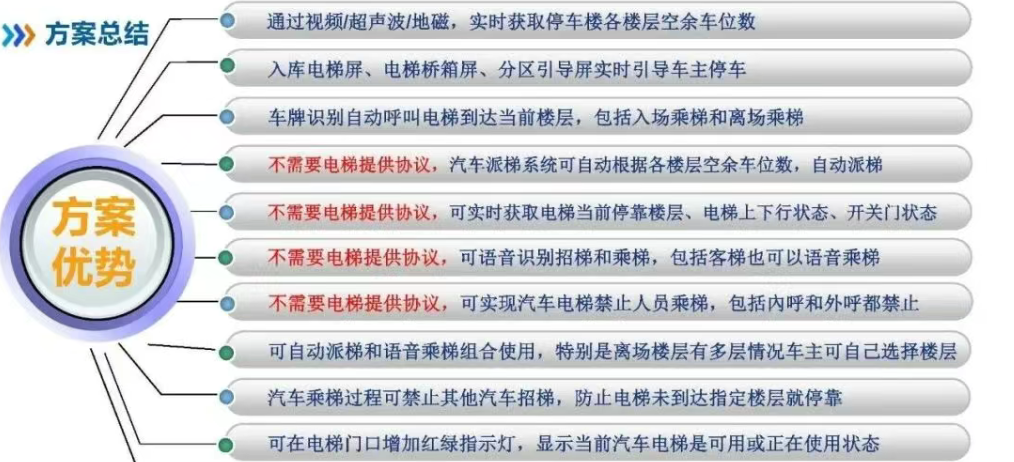
- 多屏聯動引導:在入口電梯屏、電梯轎廂屏、分區引導屏顯示實時空位信息,引導車主快速停車。
技術優勢:
- 多種檢測方式可選,適應不同環境。
- 支持夜間、雨雪、強光等復雜場景識別。
- 支持未來接入AI預測模型,預估車位變化趨勢。
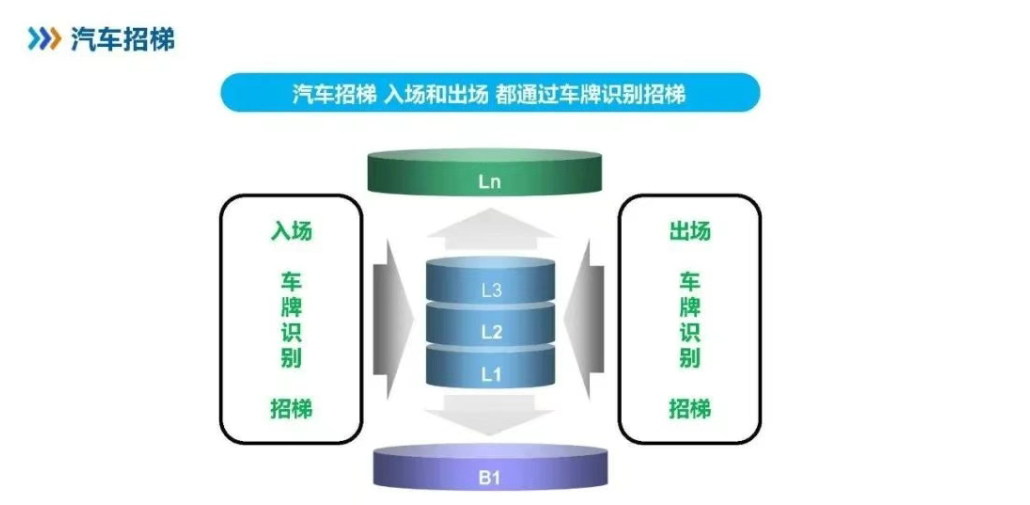
2. 汽車乘梯系統(Automotive Elevator System)
功能特點:
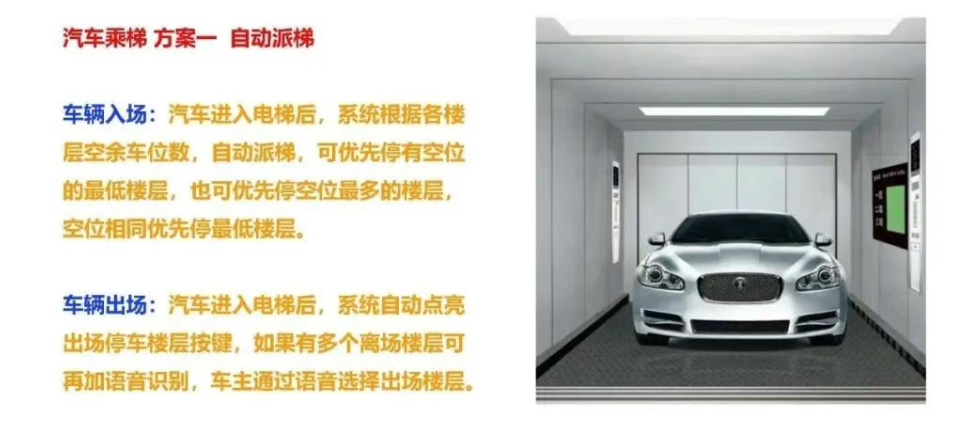
- 自動派梯:系統根據空余車位分布智能分配電梯,優先派往有空位的最低樓層,或空位最多的樓層。
- 車牌識別+自動呼叫:車輛入場時通過車牌識別觸發電梯自動呼叫,無需人工操作。
- 電梯狀態監控:實時獲取電梯當前樓層、上下行狀態、開關門狀態,無需依賴電梯廠商協議。
- 語音識別乘梯:
- 入場:語音識別呼梯并指定樓層。
- 離場:有多層可選時,通過語音選擇目標樓層。
- 防干擾機制:在汽車乘梯過程中禁止其他車輛中途呼叫電梯,防止誤停。
- 紅綠燈狀態提示:電梯口設置紅綠指示燈,提示當前電梯是否可用。
技術優勢:
- 自主調度,兼容性強,無需電梯廠商提供協議。
- 支持與現有電梯控制系統無縫集成。
- 提升調度效率,減少等待時間。
3. 電梯分類管理(Elevator Classification Management)
(1)汽車電梯(Vehicle Elevator)
- 專門用于車輛上下樓層,禁止人員乘坐。
- 內部與外部呼叫按鈕均禁用,僅通過系統自動調度。
- 可與車位引導系統聯動,實現自動派梯到最佳停車層。
(2)人行客梯(Passenger Elevator)
- 用于人員上下樓取車,實現人車分流,提升安全性。
- 人員取車時,系統自動呼叫客梯到指定樓層。
- 與汽車電梯系統隔離,防止人車混流。
三、車輛出入流程詳解
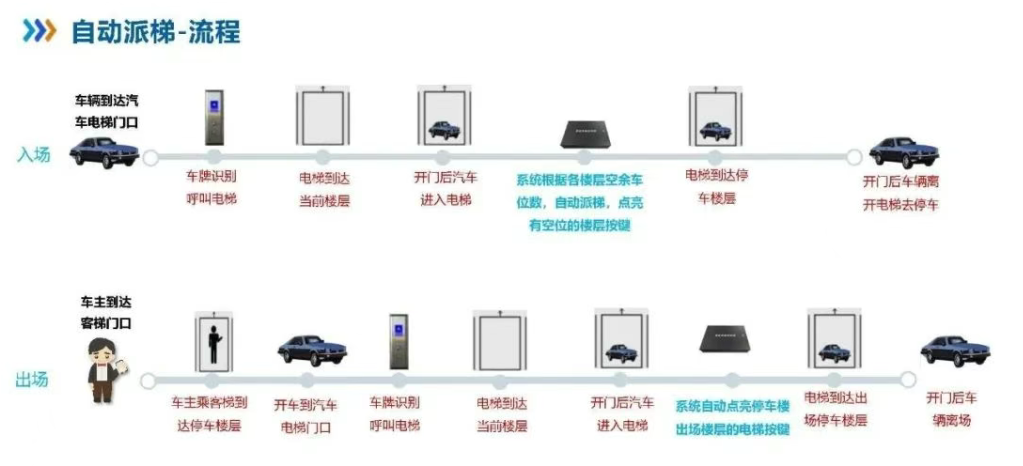
1. 車輛入場流程(Entry Process)
- 車輛駛入停車樓入口。
- 車牌識別系統啟動,識別車輛并觸發電梯自動呼叫。
- 電梯自動調度至當前樓層,紅綠燈亮綠燈,提示可進入。
- 車輛進入電梯,系統根據空余車位分布自動派梯至最佳樓層。
- 車輛駛出電梯,通過引導屏指引至空位。
2. 車輛出場流程(Exit Process)
- 車主駕車駛入出庫電梯區。
- 系統識別車輛并點亮對應出庫樓層按鈕;如有多層可選,支持語音識別選擇樓層。
- 電梯自動派梯至對應樓層,紅綠燈亮綠燈提示電梯到位。
- 車輛進入電梯,系統引導電梯下行至出口層。
- 車輛駛出停車樓,完成離場。
四、系統集成與擴展能力
1. 強大的系統兼容性
- 系統可與現有停車管理系統、電梯控制系統、安防系統無縫集成。
- 支持對接BIM(建筑信息模型)、IBMS(樓宇智能管理系統)、城市級交通平臺等。
2. 智能化擴展方向
- AI預測調度:通過歷史數據分析預測高峰時段的車位需求,提前調度電梯。
- 無人值守停車場:結合車牌識別、電子支付、遠程監控,實現24小時無人值守。
- 數字孿生可視化:構建虛擬停車樓模型,實時展示車位狀態、電梯運行軌跡等。
3. 安全機制設計
- 汽車電梯與客梯完全隔離,防止人車混用。
- 防誤操作機制,如電梯運行中禁止其他車輛呼叫。
- 視頻監控+紅外感應,防止車輛未完全進入電梯即啟動。
五、應用場景與價值分析
1. 應用場景
- 城市中心立體停車樓
- 商業綜合體地下停車場
- 醫院、交通樞紐等高密度停車區域
- 地下智能停車庫
2. 價值體現
| 維度 | 傳統停車場 | 本方案 |
|---|---|---|
| 停車效率 | 低(需人工尋找車位) | 高(實時引導+自動派梯) |
| 空間利用率 | 低(車道占用大) | 高(采用汽車電梯優化布局) |
| 安全性 | 一般(人車混流) | 高(人車分流) |
| 用戶體驗 | 差(需長時間尋找車位) | 優(智能引導+語音交互) |
| 管理成本 | 高(需人工干預) | 低(高度自動化) |

六、結語:未來發展趨勢展望
隨著物聯網(IoT)、人工智能(AI)、邊緣計算等技術的不斷發展,車位引導與汽車乘梯系統將進一步向智能化、無人化、平臺化演進。未來的智慧停車樓將不僅是車輛停放的場所,更是城市交通系統的重要節點。本方案為當前智慧停車系統建設提供了一個可落地、可擴展、高效率、高安全的技術路線,具備良好的推廣價值和商業前景。
如需進一步定制適用于某一類停車場(如地下多層、醫院、商業綜合體等)的詳細實施方案,包括設備選型、系統架構圖、施工圖紙、軟件界面設計等,歡迎提供具體需求,多奧免費提供售前技術支持。
多奧為您設計了一套完整的車位引導及汽車乘梯解決方案,采用模塊化架構實現高效協同。以下是技術實現路徑和關鍵創新點:
一、系統架構圖
[車位感知層] | |
├─ 視頻車位檢測(AI車牌識別+車位狀態) | |
├─ 超聲波陣列(5cm精度空間掃描) | |
└─ 地磁傳感器(雙軸地磁異常檢測) | |
[數據處理層] | |
├─ 邊緣計算網關(實時車位狀態融合) | |
├─ 動態路徑引擎(Dijkstra算法優化) | |
└─ 電梯控制中樞(狀態機+預測模型) | |
[交互展示層] | |
├─ 電梯廳3D導航屏(Unity引擎渲染) | |
├─ 轎廂AR投影(DLP光機) | |
└─ 語音交互終端(8麥環形陣列) | |
[控制執行層] | |
├─ 電梯協議轉換器(支持所有品牌) | |
├─ 電動阻車裝置(200kg推力) | |
└─ 智能光顯系統(POE供電LED) |
二、核心技術突破
- 多模態車位感知融合
- 視頻識別補光算法(夜間車牌識別率>99.5%)
- 超聲波抗干擾技術(200Hz-500Hz頻段過濾)
- 地磁動態校準(±0.1高斯精度)
- 電梯控制黑盒
python
# 電梯狀態機偽代碼 | |
class ElevatorFSM: | |
def __init__(self): | |
self.state = "IDLE" | |
self.current_floor = 1 | |
self.direction = "STOP" | |
self.pending_calls = [] | |
def update_state(self, sensor_data): | |
# 基于加速度傳感器和門磁信號的狀態推斷 | |
if sensor_data['door_open']: | |
self.state = "DOOR_OPEN" | |
elif sensor_data['motion']: | |
self.state = "MOVING" if sensor_data['direction'] else "STOP" | |
else: | |
self.state = "IDLE" | |
def predict_next_floor(self): | |
# 基于LSTM的樓層預測模型 | |
return lstm_model.predict(self.history_data) |
- 語音交互創新
- 方言自適應算法(支持34種地方話系)
- 轎廂降噪技術(60dB環境聲抑制)
- 應急指令優先("救命"觸發緊急制動)
三、部署實施流程
mermaid
graph TD | |
A[設備安裝] --> B[協議適配] | |
B --> C[狀態機訓練] | |
C --> D[多模態校準] | |
D --> E[壓力測試] | |
E --> F[正式運行] |


)
】)





![[Linux]從零開始的vs code交叉調試arm Linux程序教程](http://pic.xiahunao.cn/[Linux]從零開始的vs code交叉調試arm Linux程序教程)









