目錄
1.程序功能描述
2.測試軟件版本以及運行結果展示
3.部分程序
4.算法理論概述
5.參考文獻
6.完整程序
1.程序功能描述
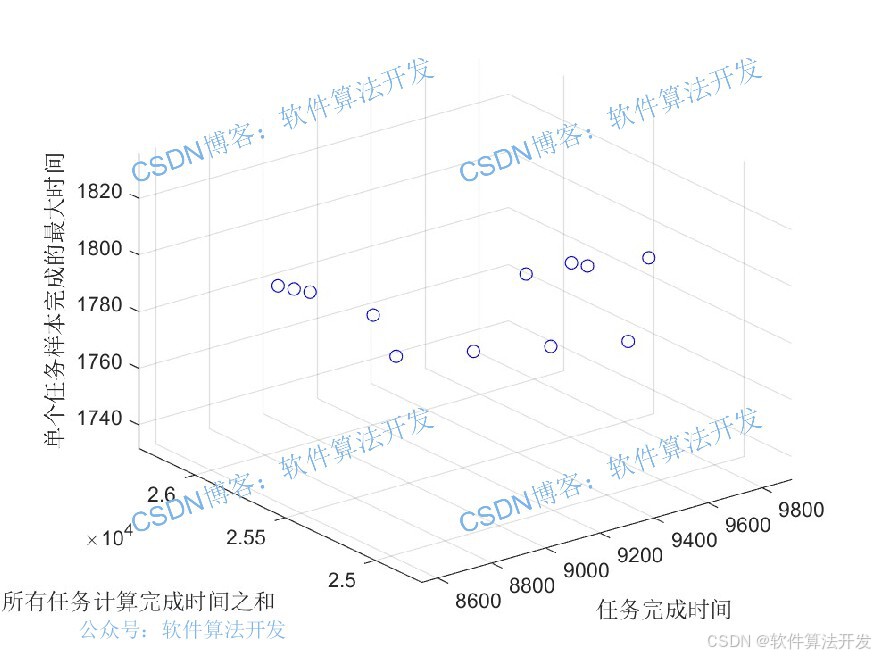
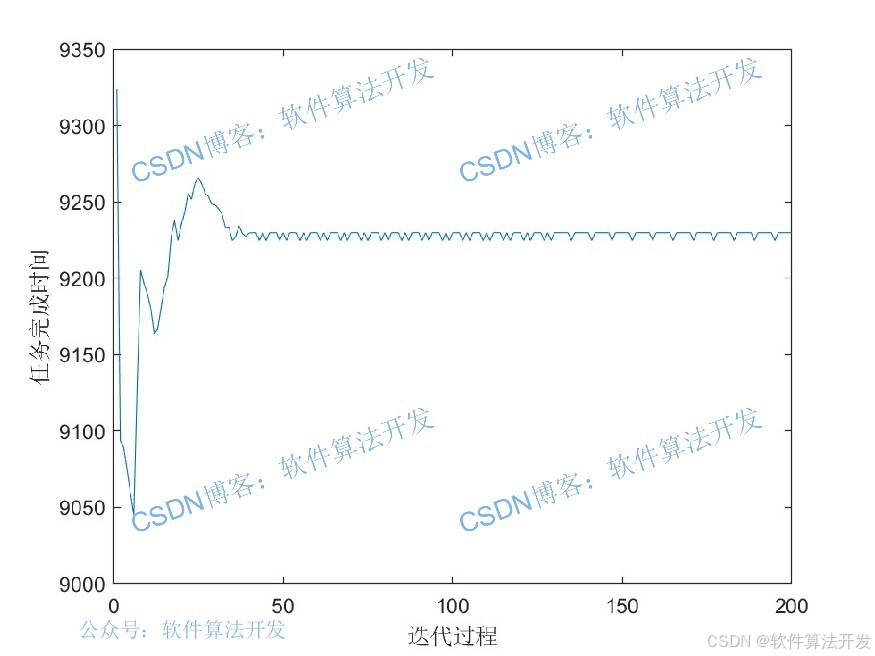
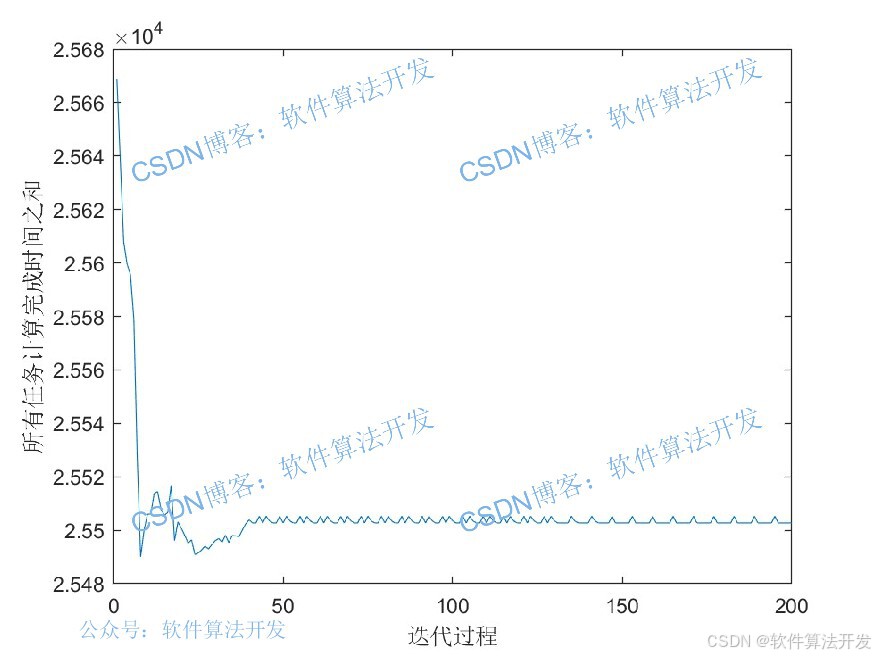
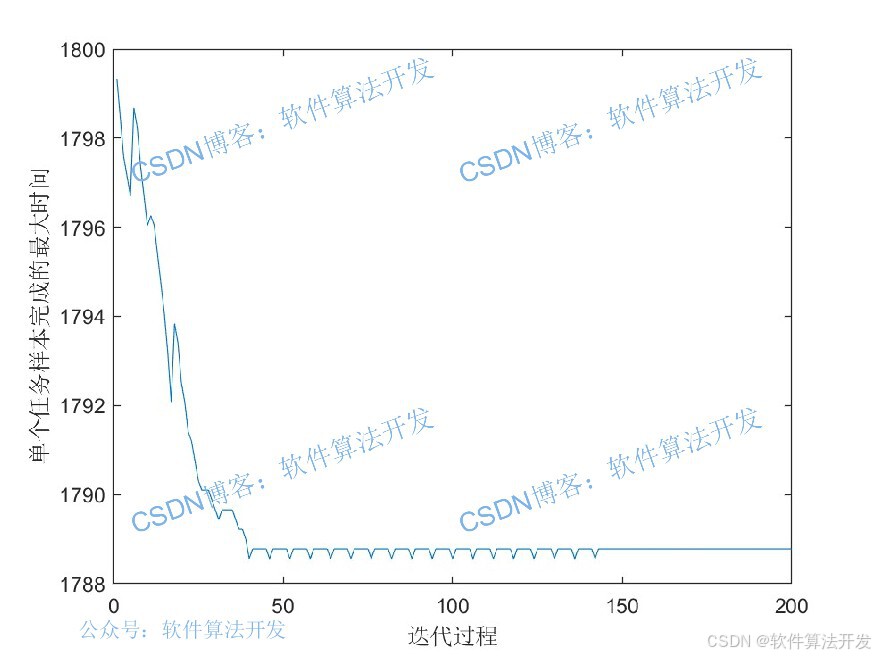
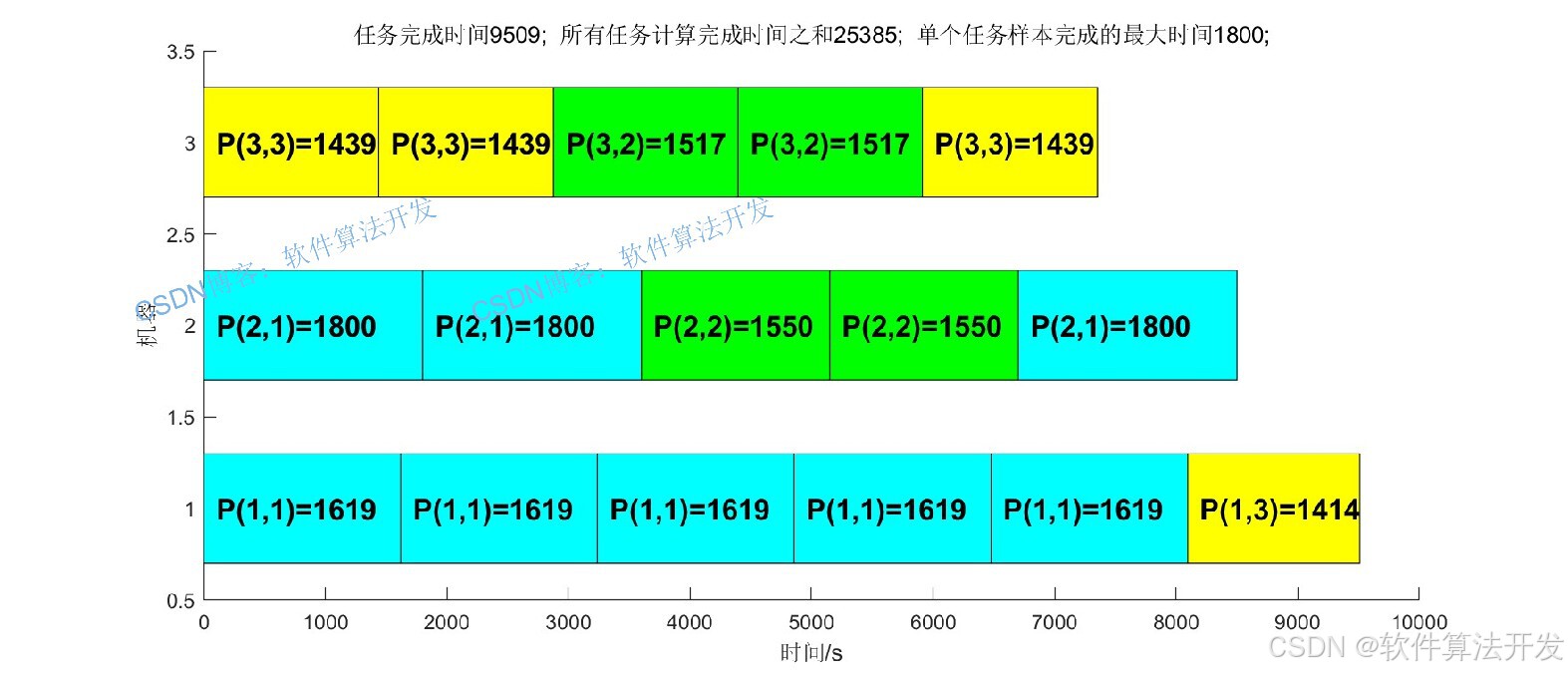
? ? ? ?車間生產調度是制造業的核心環節,其目標是在滿足設備約束、工序優先級等條件下,優化多個相互沖突的生產指標(如最小化生產周期、總延遲時間、設備負載等)。傳統單目標優化方法難以平衡多目標需求,而NSGA-II(非支配排序遺傳算法 II)?作為一種高效的多目標優化算法,通過帕累托最優理論和精英保留策略,能同時優化多個目標并生成分布均勻的最優解集,因此被廣泛應用于車間生產調度問題。
2.測試軟件版本以及運行結果展示
MATLAB2022A/MATLAB2024B版本運行
3.部分程序
% 交叉操作:生成交叉后代crosspop = repmat(empty,ncross,1); % 初始化交叉后代種群% 調用交叉函數生成后代(使用當前種群、交叉數量、層級信息和變量數量)crosspop = func_crossover(crosspop,pop,ncross,F,nvar);%%%%%%%%%%%%% 變異操作:生成變異后代mutpop = repmat(empty,nmut,1); % 初始化變異后代種群% 調用變異函數生成后代(使用當前種群、變異數量、上下界和變量數量)mutpop = func_mutation(mutpop,pop,nmut,lb,ub,nvar);% 合并父代、交叉后代和變異后代,形成新的種群pop = [pop;crosspop;mutpop];% 對合并后的種群進行非支配排序[pop,F] = func_sorting(pop);% 計算合并后種群的擁擠距離pop = func_crowding_distance(pop,F);
06_0077m4.算法理論概述
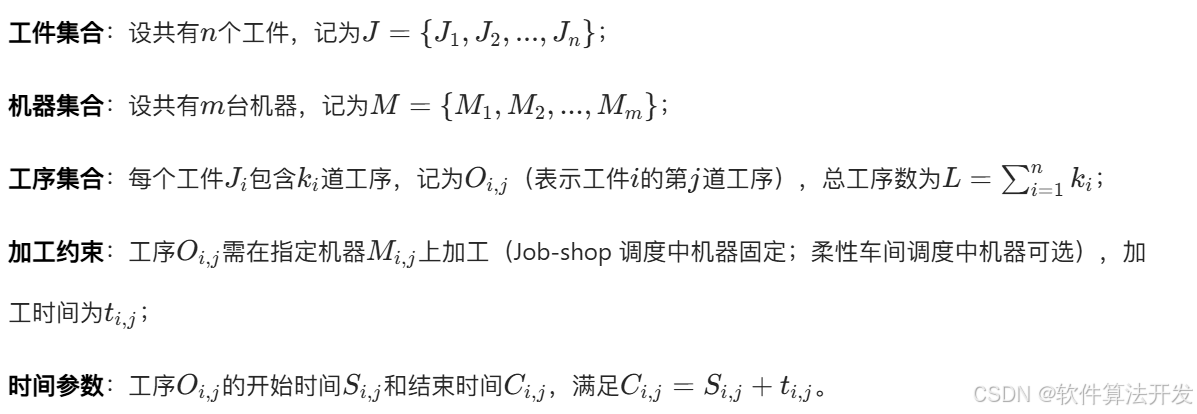
? ? ? 車間生產調度的核心是合理分配生產資源(如機器、人力),確定工件的加工順序和加工時間,以實現多目標優化。其數學建模需明確問題要素、約束條件和目標函數。
問題要素
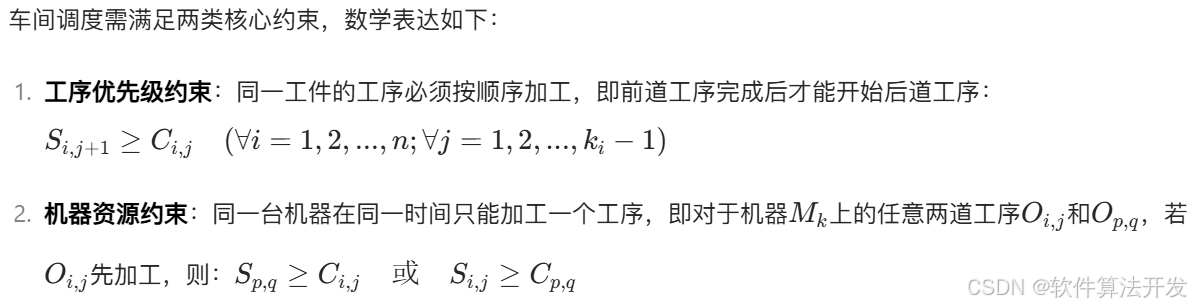
約束條件
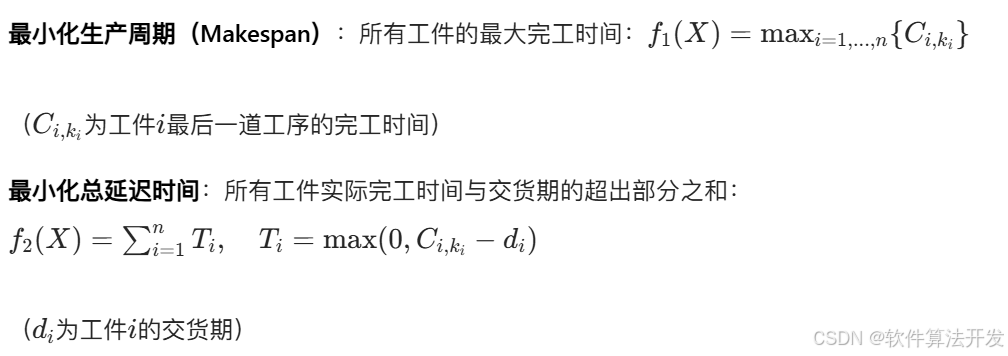
目標函數
車間調度的目標通常相互沖突(如縮短生產周期可能增加設備負載),需用多目標函數描述。
? ? ? ?NSGA-II是Deb等人在2002年提出的多目標遺傳算法改進版本,解決了初代NSGA計算復雜、解集分布性差的問題,核心優勢在于非支配排序、擁擠度計算和精英保留策略。
非支配排序是NSGA-II的核心步驟,目的是將種群中的解按“優劣”分級,具體流程:
1.對種群中每個解X,計算被其支配的解的數量(記為nX?),以及支配它的解的集合(記為SX?);
2.初始化前沿等級rank=1,將所有nX?=0的解(不被任何解支配)歸為第 1 前沿(F1?);
3.對F1?中的每個解X,遍歷其支配集合SX?,對每個Y∈SX?,令nY?=nY??1;若nY?=0,則將Y歸入下一個前沿Frank+1?;
4.重復步驟 3,直到所有解都被分配到相應前沿(F1?,F2?,...,Fr?),每個解的rank值為其所在前沿的序號。
5.參考文獻
[1]雷鈞杰,沈春婭,胡旭東,等.基于NSGAII和神經網絡的織造車間大規模調度[J].紡織學報, 2023, 44(11):208-215.DOI:10.13475/j.fzxb.20220301801.
[2]羅來兵,方遼遼,沈春婭,et al.基于改進 NSGAII 算法的渦流紡車間調度方法[J].Acta Materiae Compositae Sinica, 2025, 42(2).DOI:10.19398/j.att.202408022.
[3]荊巍巍,章磊,田俊.基于自適應NSGA-II算法的柔性車間多目標生產調度[J].組合機床與自動化加工技術, 2020(008):000.
[4]金志斌,吉衛喜,蘇璇,等.結合支配強度的NSGA-II的柔性車間低碳調度[J].現代制造工程, 2023(5):6-14.DOI:10.16731/j.cnki.1671-3133.2023.05.002.
6.完整程序
VVV







)











)