目錄
- 前言
- 一、恒流源電路
- 1.低端反饋
- 2.低端反饋注意事項
- 注意1:電阻Rx
- 注意2:三極管和運放的限制
- 3.高端反饋
- 注意:自激振蕩
- 方案二
- 二、直流穩壓電源電流
- 1.帶反饋
- 2.不帶反饋
- 3.區別

前言
基礎知識可以看個人筆記:個人筆記
一、恒流源電路
1.低端反饋
下面就是就是一個恒流源的組成電路,其中 I 就是恒定的電流,并且是受Vin的控制的

主要Rf的阻值勾搭,I分流進來的電流就可以忽略不計,那么 I 就是約等于 V/ R
計算還是和運放的計算方法一樣:
- V+ = V- = Vin,I = V/R
- 對于結點A:V- * (1/R1 + 1/Rf) - V/Rf = 0
- 兩邊同時乘以Rf:V- * (Rf/R1 + 1) - V = 0
- 得到V = V- * (Rf/R1 + 1) =Vin * (Rf/R1 + 1)
- 計算得到這里的恒定電流 I = 2 / 4Ω = 0.5A
- 而此時無論Rx的阻值怎么取,I 還是恒定為0.5A,當然也是有限度的


可以看到Rx怎么取,輸出的電流都是恒定為0.5A,而輸出電壓是會隨著Rx的變化而變化,這點剛好和之前的恒壓源的電路相反
- 恒流源:輸出的電流是固定的,但是輸出的電壓會隨著負載的變化而變化
- 恒壓源:輸出的電壓是固定的,但是輸出的電流會隨著負載的變化而變化
2.低端反饋注意事項
注意1:電阻Rx
電流恒定是有條件的

I實際上是由電壓Vx提供的,這不過利用負反饋來讓電壓變化,從而讓V的電壓變化,從而讓 I 恒定
也就是說前提條件是Rx不能太大,如果太大,那么V根本分不到電壓(相當于斷路了),實際上輸出的電流就是:12?Rx,根本就不受Vin的控制的
又或者說:輸出的恒定電流是1A,那么我Rx要想流過1A,假設Rx是100Ω,那就相當于Rx要有一個100V的電壓,而Vx只有12V,這是不可能實現的(忽略掉三極管的最小導通壓降)
而考慮上壓降的話,也就是說Rx的電壓最大只有12-0.7 = 11.3V,這個電路 I 前面計算過恒定是0.5,并且V前面也計算過分壓是2V,那么Rx最大就不能超過11.3V?0.5A - 4Ω= 18.6Ω,超過的話輸出的 I 就會變小
注意2:三極管和運放的限制

就圖中的三極管,之前學過,三極管其實就是一個電流控制電流型的器件,也就是 Ic = βIb
而假設這里的三極管放大系數β為100,而Rx的恒流要求是10A,那么Ib 就要0.1A,而實際上大多數運放的輸出電流最大是不超過50mA的,有一些只有十幾mA
并且就算運放能輸出50mA,但是三極管一旦從進入飽和區,Ie的電流基本就恒定了,也就是Ic的電流基本恒定了,此時就算Ib電流繼續增大,Ic也無法增大了,如下圖,Ic是不會一直增大,它最后直接變為平滑,此時不管Uce如何增加,也不會變。而Uce可以認為是等于Ube,此時三極管就相當于開關了,供應的電流想要繼續放大就要取決于接在集電極(Ic)的電源的大小了
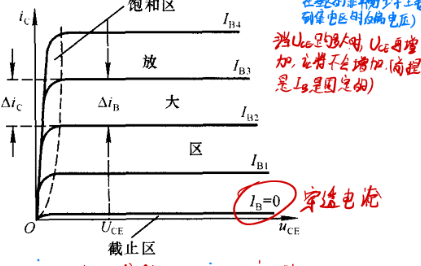

結論就是,在對于這個電路,輸出的恒定電流不僅僅取決于運放的最大輸出電流(三極管放大區下要繼續加大電流就得加大Ib的輸入電流),還取決于三極管集電極接的電源的大小(飽和區下要繼續增大電流只能通過加大輸入電源VCC)
示例:

根據這里可以計算到β差不多就是310,其實還是100,但是這種接法會導致Ic泄流進Ib,和Vout的輸出的電流產生抵消
Ic = Ib + Ie,而Ib為0.3mA,可以忽略不記,就可以當作流過探針3的電流幾乎來自Ic,而實際上Ic的電流是會受Ib控制的,放大區下:Ib * β = Ic

這時候如果把2Ω的電阻換成0.2Ω,也就是輸出的恒定電流會變成10A,但是,實際上并達不到:

最大只有1.82A,這就是因為運放輸出的最大電流只有40.6mA,可能這時候會認為是探針3的電阻影響到了,并且R5電阻的電壓都不是2V,那把10Ω的電阻調小來看:

可以看到運放最大輸出還是只有40.6mA,這時候Ic可以看到已經基本就是310?Ib > Ic了,已經是一個飽和區的狀態了,此時流過R的電阻基本取決于電源VCC,嘗試把VCC增大:

可以看到增大到240V,確實可以輸出10A了,但實際上顯示中,電路中怎么可能有240的電壓接入
所以還是一個結論:輸出的恒定電流不僅僅取決于運放的最大輸出電流(三極管放大區下要繼續加大電流就得加大Ib的輸入電流),還取決于三極管集電極接的電源的大小(飽和區下要繼續增大電流只能通過加大輸入電源VCC,當然也可以再接一個三極管繼續放大),同時在恒定電流下,接在發射極Rx也不能超過上限

3.高端反饋
反饋是接在了正向輸入端
牢記:
- V+ > V-,Vout會增加
- V+ < V-,Vout會減少

接上電源12V后,A、B點的電壓是12V,那么V+>V-,Vout輸出會增大,同時通過RL反饋給V+,使得V+減小。
直到V+減小到11V和Vref一樣,也就是和V-一樣的時候,Vout就差不多維持不變了,此時三極管肯定也導通了
當Vout的反饋作用下,V+減壓到11V,此時Vout也差不多就增加到恒定值了
示例:

開關沒閉合下,可以看到在反饋的作用下,V+從12V會被拉到7.72V,Vout一直增加,輸出的電流很大,這時候開關閉合:

發現最后V+就穩定在了11,和V-一樣,Vout也下降了
這種接法泄流比較小,因此β是100,基本Ic = 100 * Ib,并且這里的運放是一個理想的運放
注意:自激振蕩

按道理穩定后輸出應該是恒定不變的,但是實際上會輸出一個正弦波,這是因為運放的控制速度比輸出的反饋速度快太多了,反饋的速度會跟不上運放的控制速度,最后會導致輸出造成正弦波的振蕩
**這其實就是經典的巴克豪森振蕩條件(Barkhausen Criteria),**振蕩出現的兩個條件:
- 環路增益 |Aβ| ≥ 1(A 是放大器增益,β 是反饋系數);
- 環路總相位移為 0 或 2π 的整數倍(即“等效正反饋”);
真實運放內部是多級放大電路,存在以下問題:
- 有限增益帶寬積(GBW):頻率越高,增益越小;
- 存在相位延遲(滯后):輸入和輸出之間會有滯后;
- 內部電容、電感形成低通或帶通特性;
- 高頻時,信號反饋回輸入端會帶上相位差。
當某一頻率下,反饋信號落后輸入信號 180°,而此時放大器增益剛好 ≥ 1:
- 此時負反饋變成了正反饋!
系統就會開始自激振蕩,形成正弦波!
解決方法圍繞:
- 反饋跟不上運放的控制速度:加快反饋速度或者減少運放的控制速度
減少運放的控制速度: 選擇合適的運放,帶足夠的相位裕度和增益裕度 ,仿真中就是減少均一增益帶寬的頻率:

如果不想更換運放,對于這個電路則可以從三極管和反饋入手:

(1)因為A點的電壓的下降或者增加的速度,實際上就是由三極管來決定,三極管關斷的速度快一些,A點的反饋電壓就可以更快增加或者減少,從而跟上運放的控制速度,所以可以更換一個關斷速度更快的三極管
(2)或者增加外部頻率補償電容 ,就圖中的紅色部分是修改后的
-
其中運放的反向輸入端和輸出會接一個積分電容:
-
- 加入積分電容后,反饋路徑在高頻時會衰減更多,降低高頻增益,增加相位裕度,從而防止振蕩(幾pF~幾十pF)。簡單點就是減少輸出的速度,高頻信號:電容快速充放電 → 相當于“短路” → 信號被短到地了(高頻信號被濾掉了一部分)
-
而反饋電阻也會加一個電容,道理也是一樣, 這個電容在信號有高頻成分時,能讓正向輸入端也能快速地感知變化
-
- 它讓正相輸入端的頻率響應從原來的“純電阻參考”變成“有一定頻率跟蹤能力”;
- 解決輸出端所接的三極管開關頻率有限導致的反饋頻率跟不上運放的控制速度,加快反饋的速度
-
需要注意的是一般正向輸入端還要加一個接地電阻,然電容可以泄能,并且反向輸入端的Vref要在原來的基礎上減少一半,對于B點來說:(1/1 + 1/1)Vb -Va =0,也就是Va = 2Vref,沒加之前是Va = Vref
正向輸入端串聯電阻并聯電容(前饋電容)
📌 作用:
- 這個電容會在高頻時將輸出端的變化“快速注入”正向輸入;
- 它 加快了正向輸入對輸出的“跟蹤”能力;
- 本質上也是抑制因反饋慢而產生的振蕩,但方式不同——
- 反向積分電容 → 降低反饋增益,減緩運放輸出速度;
- 正向前饋電容 → 加快輸入端“知情速度”。
反向輸入端和輸出之間并聯積分電容,這是積分型負反饋或稱為“相位補償電容”:
📌 作用:
- 低頻時不起作用(截止),不影響放大器DC工作點;
- 高頻時導通,形成負反饋“短路”通道;
- 這樣高頻增益下降、相位裕度增大 → 抑制高頻振蕩;
- 電容值一般選在幾pF~幾十nF 之間,根據系統極點頻率調整。
一個在“慢下來”,一個在“快起來”,共同作用 → 相位裕度提升,振蕩消除。
| 結構 | 作用 | 本質 |
|---|---|---|
| 運放輸出 - 反向輸入 電容(積分) | 抑制高頻增益,防止振蕩 | 相位補償,提高穩定性 |
| 正向輸入串電阻并聯電容 | 快速響應輸出變化,加速反饋 | 提高反饋速度,消除滯后 |
| 更快的三極管 | 加速實際A點電壓的變化 | 提高閉環響應速度 |
方案二
采用是一個PNP三極管

由于BE其實就是個二極管,而二極管在導通后是有一個鉗位功能的,就是會將電壓鉗位在0.7V
一開始A的電壓肯定還是12V
- 此時b和e之間的電壓差是12V,滿足二極管的導通條件
- Ie的電流是會流進b的,而由于運放內部是有很大的阻抗的,這就會導致Vout的電壓會上升,所以一開始Vout的電流其實是負的(從b流進輸出端的)
- 而由于三極管中be的鉗位功能,會把電壓拉到0.7V,那么Vout的電壓上升(并且上升的是比較快的),e的電壓也會下降,也就是A點的電壓也會慢慢下降;同時運放的輸出電流達到最大值后也會開始參與控制,將輸出端的電流慢慢拉回去(因為輸出端最后的電流其實是不能等于負的)
- 當A點的電壓下降到11V,Vout的電壓是10.3V的時候,剛好be之間就是0.7V,鉗位住了,利用了三極管的鉗位功能
- 后續運放作用下,會一直將Vout維持在10.3V
- 此時流進RL的電流也穩定下來了
計算也很簡單:
- 而V1=Vref=V2=Va=11
- I = (12-Va)/1=1A

二、直流穩壓電源電流
1.帶反饋
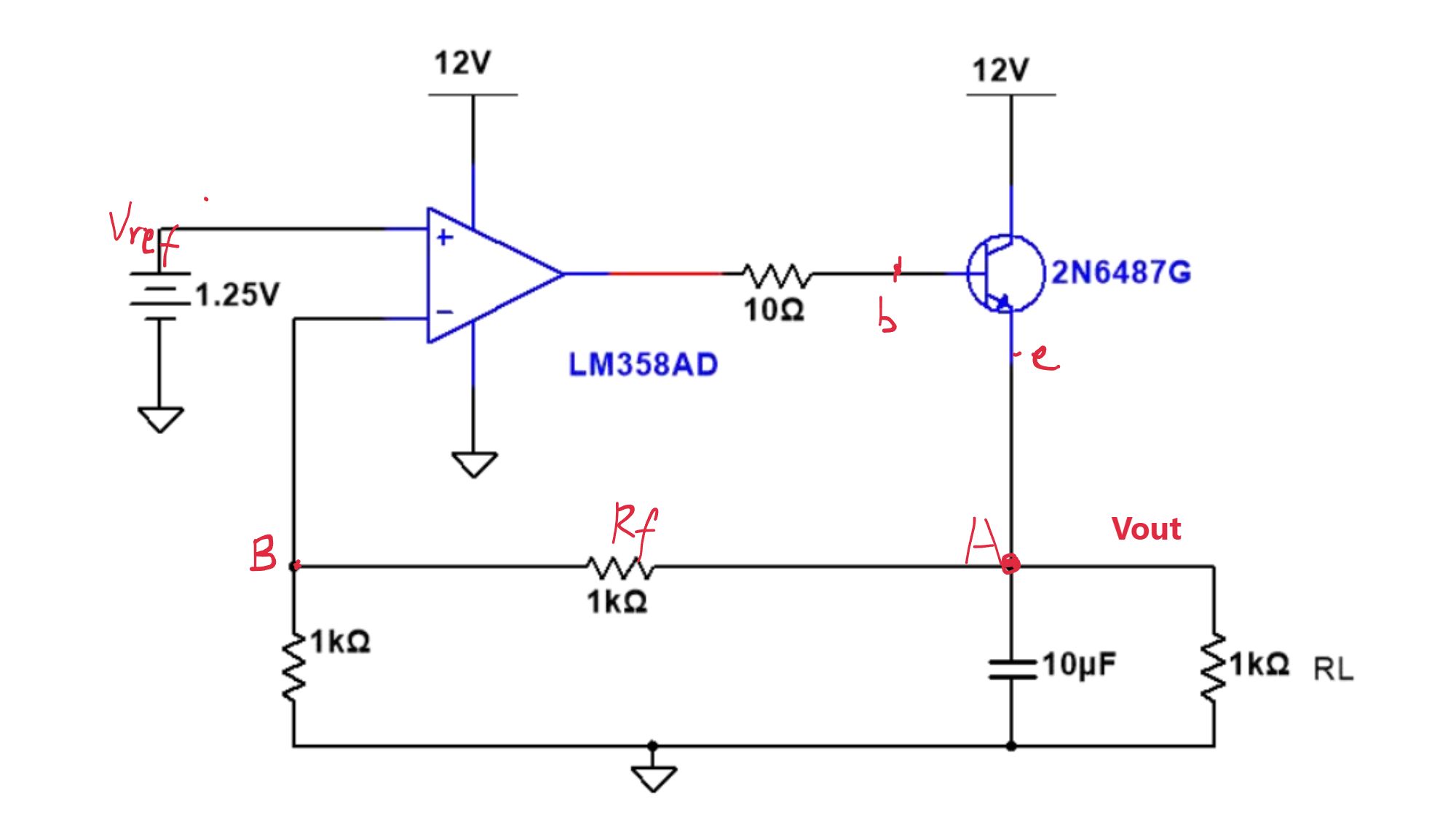
直接推公式:V+ = V- = Vref = Vb
- 對于B點,列結點電壓方程:Vb(1/1 + 1/1) - Vout * 1 =0
- Vout = 2Vb = 2Vref = 2.5V
具體的原因還是圍繞V+>V-輸出增加,V+<V-輸出減少
- 當接入Vref的時候,V+為1.25V,V-為0V,那么運放輸出端輸出會增加
- 而三極管中的鉗位作用,be會維持在0.7V,那么當隨著b輸出電壓的增加,e也會增加
- 直到e增加到了2.5V,此時B點分壓就是1.25V,和V+相同了,開始維持穩定
- 也就是最后輸出一個穩定的電壓
2.不帶反饋

這種就是有弊端,三極管會發熱,用穩壓二極管,那么A點就會穩定在5.6V,而由于三極管be的壓降功能,C點的電壓就是≈5V(或者4.9V),那么此時三極管承受的電壓就是12-5=7V的電壓,而此時的電路外部負載電流假設為1A,那么三極管就承受7W的功耗
此時三極管是工作于放大狀態的(Ub明顯大于Ua的,反向偏置,而be之間是正向偏置,符合放大條件)
3.區別
不帶反饋:
- 穩壓能力差:電壓變化依賴于穩壓二極管的特性,且 溫度漂移較大
- 負載變化時電壓波動大
- 輸出電流能力依賴于三極管和基極限流電阻
- 反饋路徑=無,只能“被動穩定”
- 當負載并聯電阻上來,輸出的電壓會變化,不會重新恢復到要求的電壓
帶反饋:
- 穩壓精度高:取決于參考源和運放精度;
- 負載調整率好:負載電流變化時,反饋及時調整;負載并聯電阻進來,輸出的電壓會變小,內部就將其重新調回目標的電壓
- 輸出電流能力強(三極管提供電流,運放控制)
- 頻率響應可調(通過補償電容等手段防止震蕩)
- 溫漂小,輸出穩定性高





)


:Scrapy框架)










