更多精彩,詳見文末~~~
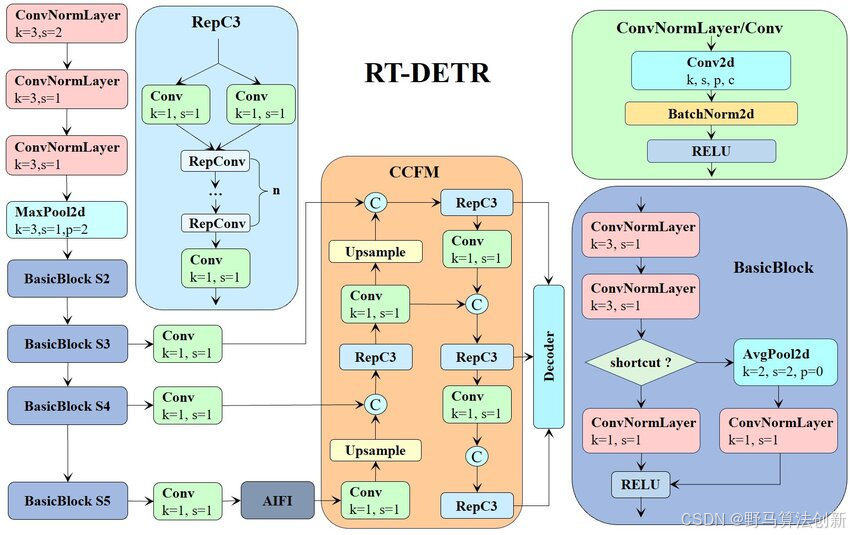
在目標檢測的高速發展中,RT-DETR作為DETR(DEtection TRansformer)的高效變體,憑借其優異的性能和較快的推理速度,已經成為許多實際應用中的首選算法。然而,盡管RT-DETR在精度和效率上有了顯著提升,但在實際應用中依然面臨一些挑戰和瓶頸。那么,如何在現有RT-DETR的基礎上進行創新和改進,進一步提升其性能呢?今天,我們將從多個角度探討如何對RT-DETR進行優化,突破現有局限,迎接更廣泛的應用場景。
痛點一:推理速度瓶頸——如何加速推理?
盡管RT-DETR相比傳統DETR在推理速度上已經有了顯著改進,但在一些對實時性要求極高的場景(如自動駕駛、安防監控等),其推理速度仍顯得不足夠快。那么,如何進一步加速推理過程呢?
創新方向:輕量化網絡設計
RT-DETR的推理速度瓶頸很大程度上來自其龐大的網絡結構和計算復雜度。為了解決這一問題,可以通過以下創新方向進行優化:
-
網絡剪枝:通過去除冗余的網絡層和參數,減少計算量。尤其是在Transformer結構中的多頭自注意力層,可以采用剪枝算法去除對結果貢獻較小的頭,從而加快推理速度。
-
量化與低精度計算:將模型權重從32位浮點數減少到16位甚至8位,這不僅能減小模型大小,還能加速推理過程,尤其適用于邊緣設備。
-
卷積與Transformer結合:在RT-DETR中引入輕量級卷積神經網絡(CNN)來進行特征提取,減少Transformer的計算負擔。通過CNN進行初步的特征提取后,再將這些特征送入Transformer進行細化,可以大大提升模型的推理效率。
痛點二:小物體檢測能力不足——如何提升小物體檢測精度?
雖然RT-DETR在大物體檢測上表現出色,但在小物體的檢測精度上,仍然存在一定差距。傳統DETR和RT-DETR對于小物體的定位和識別常常不盡如人意,這主要是因為小物體的特征較為模糊,且相較于大物體占據圖像的像素較少,容易被忽略。
創新方向:引入多尺度特征融合
為了提升小物體的檢測能力,可以采用以下幾種創新方法:
-
多尺度特征融合:在RT-DETR中引入多尺度特征圖,結合不同尺度的卷積層和自注意力機制,將不同層次的信息進行融合。這能幫助模型更好地捕捉小物體的細節,從而提升對小物體的檢測能力。
-
注意力機制優化:優化自注意力機制,使其能夠更加關注圖像中的小物體區域,減少大物體對特征學習的干擾。可以通過調整注意力計算方式,使得對小物體的注意力分配更加集中,提高小物體的召回率。
-
生成錨框機制的創新:改進RT-DETR的錨框設計,使用更加動態和靈活的錨框機制,使得模型能夠適應不同尺度的目標,尤其是小物體的檢測。
痛點三:內存消耗高——如何優化內存使用?
在處理大規模數據集時,RT-DETR可能面臨較高的內存消耗問題,尤其是在高分辨率圖像或復雜的場景下,模型的計算需求和內存占用都可能達到瓶頸。
創新方向:內存優化技術
-
梯度累積與分布式訓練:采用梯度累積技術,將多個小批次合并為一個大批次進行訓練,從而減少每次訓練時所需的內存。對于大規模數據集,可以結合分布式訓練框架,將訓練任務分配到多個設備上,進一步減少單個設備的內存壓力。
-
內存映射優化:通過內存映射(memory-mapping)技術優化數據加載過程,避免在訓練時將整個數據集加載到內存中,從而減少內存消耗。
痛點四:缺乏跨任務能力——如何提升多任務處理能力?
目前,RT-DETR雖然在目標檢測中表現出色,但在多任務學習(如同時進行目標檢測與目標跟蹤、語義分割等任務)上,還存在一定的局限性。為了適應更多應用場景,RT-DETR需要具備更強的跨任務能力。
創新方向:多任務學習框架
-
聯合優化目標函數:通過引入多任務學習框架,將目標檢測與其他任務(如目標跟蹤、語義分割)聯合訓練,利用共享的特征表示提高模型的泛化能力。
-
任務相關注意力機制:設計多任務相關的注意力機制,使得模型能夠在不同任務間共享知識,提高多任務學習的效率。



部署前后端分離程序)







)
路由)
)





