目錄
一、汽車總線技術概述
二、主流汽車總線技術對比分析
1. CAN總線(Controller Area Network)
2. LIN總線(Local Interconnect Network)
3. FlexRay總線
4. MOST總線(Media Oriented Systems Transport)
5. 車載以太網(Automotive Ethernet)
6. 其他專用總線
三、總線技術對比總結
四、應用場景與選型建議
五、未來發展趨勢
一、汽車總線技術概述
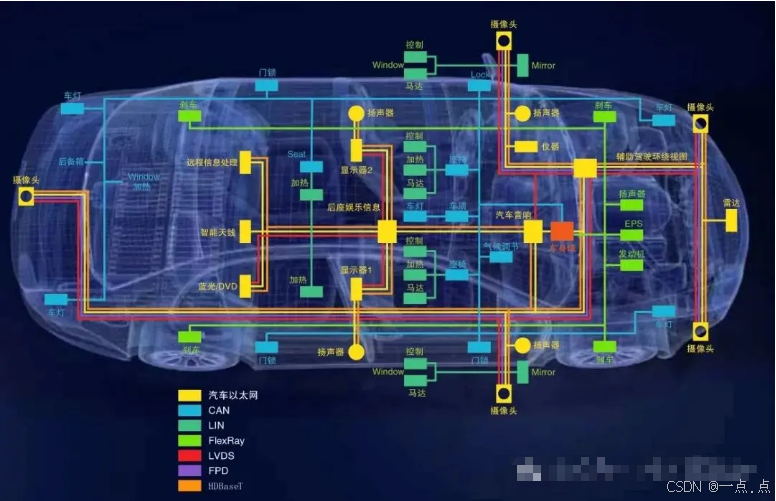
汽車總線是車載電子系統的通信骨架,用于實現ECU(電子控制單元)之間的數據傳輸。隨著汽車電子化、智能化發展,總線技術逐步演進,形成多種協議并存的分層架構。
二、主流汽車總線技術對比分析
1. CAN總線(Controller Area Network)
-
技術特性:
-
物理層:雙絞線差分信號,支持總線型拓撲。
-
數據速率:經典CAN(CAN 2.0)最高1 Mbps,CAN FD(靈活數據速率)可達5 Mbps。
-
訪問機制:基于優先級的CSMA/CA(載波偵聽多路訪問/沖突避免)。
-
幀結構:標準幀(11位ID)和擴展幀(29位ID)。
-
-
優點:
-
高可靠性:內置錯誤檢測與重傳機制。
-
低成本:廣泛普及,硬件成本低。
-
實時性:滿足多數控制場景需求。
-
-
缺點:
-
帶寬受限,難以支持大數據量傳輸。
-
無時間同步機制,不適合高精度控制。
-
-
應用場景:
-
動力系統(發動機、變速箱)、車身控制(車門、燈光)、診斷系統(OBD)。
-
-
變種技術:
-
CAN FD:提升數據場長度(64字節)和速率,用于ADAS傳感器數據。
-
2. LIN總線(Local Interconnect Network)
-
技術特性:
-
物理層:單線傳輸,UART通信簡化版。
-
數據速率:最高20 Kbps。
-
拓撲結構:主從模式,單一主節點控制通信。
-
-
優點:
-
超低成本,布線簡單。
-
低功耗設計,適合低復雜度節點。
-
-
缺點:
-
帶寬極低,僅支持簡單控制指令。
-
無容錯機制,可靠性較低。
-
-
應用場景:
-
車窗、雨刷、座椅調節等非關鍵子系統。
-
LIN 的目標是為現有汽車網絡(例如CAN 總線)提供輔助功能,因此LIN總線是一種輔助的總線網絡。在不需要CAN 總線的帶寬和多功能的場合,比如智能傳感器和制動裝置之間的通訊使用LIN 總線可大大節省成本。
3. FlexRay總線
-
技術特性:
-
物理層:雙通道冗余設計,支持星型或總線型拓撲。
-
數據速率:每通道10 Mbps,雙通道可達20 Mbps。
-
訪問機制:時間觸發(TDMA)與事件觸發混合模式。
-
-
優點:
-
高實時性:確定性的時間觸發通信。
-
高可靠性:冗余通道支持故障容錯。
-
-
缺點:
-
成本高,協議復雜度高。
-
配置復雜,開發周期長。
-
-
應用場景:
-
線控系統(Brake-by-Wire)、高端動力總成、主動懸架。
-
4. MOST總線(Media Oriented Systems Transport)
-
技術特性:
-
物理層:光纖或電氣傳輸,環形拓撲。
-
數據速率:MOST25(25 Mbps)、MOST50(50 Mbps)、MOST150(150 Mbps)。
-
訪問機制:同步時間槽分配。
-
-
優點:
-
高帶寬,支持多媒體數據流。
-
低延遲,音視頻同步能力強。
-
-
缺點:
-
成本高昂,擴展性受限。
-
環形拓撲單點故障影響全局。
-
-
應用場景:
-
車載信息娛樂系統(音頻、視頻)、導航系統。
-
5. 車載以太網(Automotive Ethernet)
-
技術特性:
-
物理層:雙絞線(100BASE-T1、1000BASE-T1)或光纖。
-
數據速率:100 Mbps~10 Gbps(如10BASE-T1S)。
-
協議棧:基于TCP/IP,支持DoIP(診斷協議)。
-
-
優點:
-
超高帶寬,支持自動駕駛大數據傳輸。
-
開放標準,兼容性強。
-
支持軟件定義網絡(SDN)。
-
-
缺點:
-
實時性需通過TSN(時間敏感網絡)增強。
-
電磁兼容性(EMC)要求高。
-
-
應用場景:
-
ADAS(攝像頭、雷達)、智能座艙、OTA升級。
-
-
關鍵協議:
-
TSN:提供時間同步和低延遲保障。
-
AVB(音視頻橋接):用于多媒體傳輸。
-
6. 其他專用總線
-
LVDS(低壓差分信號):
-
用于攝像頭/顯示屏高速點對點傳輸(1-3 Gbps)。
-
-
SENT(單邊半字傳輸協議):
-
低成本傳感器數據傳輸(如壓力、溫度)。
-
三、總線技術對比總結
| 特性 | CAN | LIN | FlexRay | MOST | 車載以太網 |
|---|---|---|---|---|---|
| 速率 | ≤5 Mbps | ≤20 Kbps | ≤20 Mbps | ≤150 Mbps | ≤10 Gbps |
| 成本 | 低 | 極低 | 高 | 高 | 中等-高 |
| 實時性 | 中等 | 低 | 高 | 中等 | 高(TSN) |
| 可靠性 | 高 | 低 | 極高 | 中等 | 高 |
| 拓撲 | 總線型 | 主從鏈 | 星型/總線 | 環形 | 星型/混合 |
| 典型應用 | 車身控制 | 簡單執行器 | 線控系統 | 多媒體 | ADAS/智能座艙 |
四、應用場景與選型建議
-
低復雜度控制:LIN > CAN(成本優先)。
-
高可靠性控制:FlexRay > CAN FD(動力/底盤)。
-
多媒體傳輸:MOST(傳統車型)→ 車載以太網(新型架構)。
-
自動駕駛與智能網聯:車載以太網 + TSN。
-
傳感器網絡:SENT(低速)、LVDS(高速)。
五、未來發展趨勢
-
以太網主導:逐步替代CAN/LIN,成為主干網絡。
-
TSN普及:解決實時性與帶寬矛盾。
-
區域架構:Zonal架構簡化布線,依賴高速總線。
-
無線通信:5G/V2X與有線總線協同。
通過以上分析可見,汽車總線技術呈現分層化、多元化的特點,未來將以以太網為核心,結合傳統總線形成混合網絡,以滿足智能化、網聯化的需求。
果此文章對您有所幫助,那就請點個贊吧,收藏+關注 那就更棒啦,十分感謝!!!




)










)

)

