研究背景:日常生活中,健康人依靠手完成對物體的操作。對于手部截肢患者,手部的缺失導致他們難以有效地操作物體,進而影響正常的日常生活。擁有一個能夠實現擬人地自然抓取多種日常物體的五指動力假手是手部截肢患者的夙愿,有助于提高患者自尊心和生活的信心。傳統假肢手多依賴腦機接口(BCI)或肌電信號(EMG)控制,但存在手勢適應性差、意圖識別精度低等問題。盡管視覺系統能增強物體感知,卻難以實現動態擬人化抓握動作。截肢者在使用現有假肢時,常面臨操作不自然、功能受限的困擾,不僅影響日常效率,更可能削弱其心理自信。為此,該團隊提出了一種創新解決方案——基于視覺系統的動力假手,通過動態手勢建模與智能意圖預測,顯著提升了假肢的擬人化水平與實用性。研究內容:該研究由哈爾濱工業大學(深圳)、中國科學院沈陽自動化研究所、南方科技大學等團隊聯合完成,首次實現了假肢手在抓取過程中抓取動作的擬人化。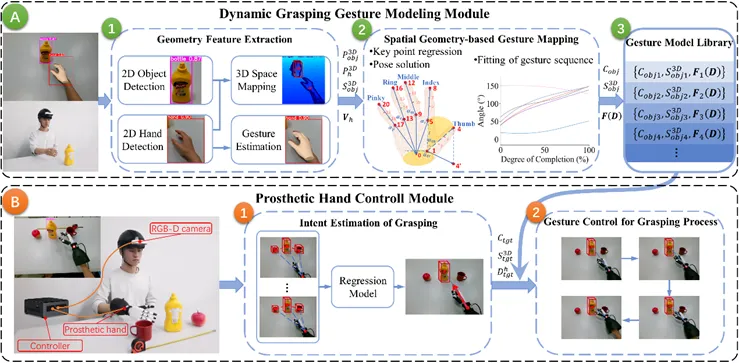
如圖1所示,智能假手系統架構展示了視覺驅動假手系統的兩大核心模塊,分別為抓取手勢動態建模功能模塊和假肢手控制功能模塊。動態抓握手勢建模模塊(A部分):通過頭戴攝像頭捕捉健康人手部抓握物體的視覺數據,依次完成物體3D重建、手勢關鍵點提取,并構建手物距離與關節角度的多項式函數,最終形成可擴展的手勢模型庫。假手控制模塊(B部分):結合實時視覺數據,利用運動軌跡回歸算法預測用戶抓取目標,從模型庫調用對應手勢函數,驅動假手實現擬人化抓握。該設計實現了“視覺感知-意圖預測-動態控制”的全自動化閉環。
圖1智能假肢手系統概述。(A) 上半部分為動態抓取手勢建模模塊工作流程。 (B) 下半部分為假肢手控制模塊工作流程。該團隊以右手假肢為例進行研究。動態抓取手勢建模模塊的數據來源于人右手抓取多種物體。圖2詳細呈現空間幾何手勢映射方法(SG-GM)的流程。物體感知(a部分):采用YOLOv5檢測目標,結合深度信息重建物體3D點云,并通過背景剔除與聚類分割提取精確幾何特征。手勢解析(b部分):改進的SRHandNet模型定位手部區域,結合IntagHand算法估計21個關節角度,生成MANO手部網格模型。動態映射(c部分):將手-物距離序列與關節角度擬合為多項式函數,構建手勢模型庫,確保假手從接近到抓握全程動作連貫擬人。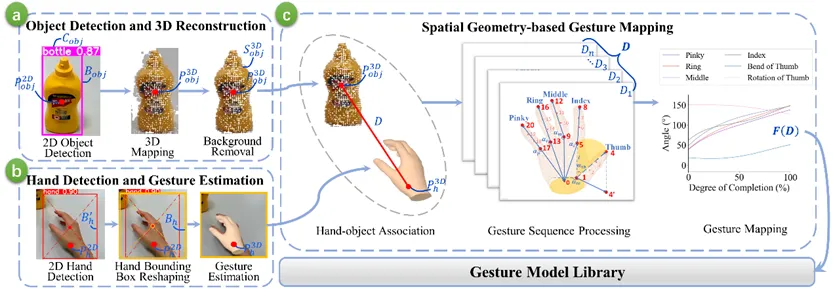
圖2基于空間幾何的手勢映射方法(SG-GM)流程。人體抓取物體過程中,腕部在空間的運動曲線通常可近似為一條直線。基于該原理,我們提出了MTR-GIE算法。我們將采集
個假肢手腕部的位置。根據這些腕部位置回歸一條空間直線,用于預測假肢手的運動方向,進而實現抓取意圖的估計,圖3揭示了多物體環境下意圖估計算法(MTR-GIE)的數學內核:軌跡回歸:基于假肢手腕的連續空間坐標(紅點),通過最小二乘法擬合出預測運動直線(綠藍平面交線)。空間分割:構建橙色空間分割平面,篩選位于預測軌跡左側且距離最近的物體作為抓取目標。該算法僅依賴頭戴攝像頭數據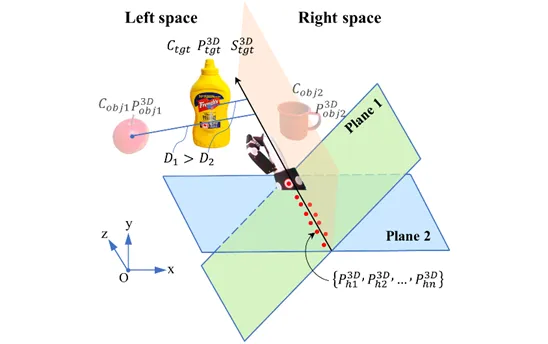
圖3 基于運動軌跡回歸的抓取意圖估計算法(MTR-GIE)估計抓取意圖的示意圖。總結與展望本文提出的具有視覺的動力假肢系統具備對自然手勢構建模型的能力,針對新的物體能夠快速的構建手勢。同時,該假肢系統實現了擬人化的手勢控制,能夠適應多物體抓取場景。此外,本文提出的基于運動軌跡回歸的抓取意圖估計算法在假肢運動過程中快速確認抓取目標,大幅度降低了對抓取時間和自然手勢控制的影響。系統在單物體環境下抓取成功率為95.43%,抓取時間為3.07±0.41s,接近于人手正常抓取物體所用時間。假肢手與人手抓取動作的相似度為0.911。在多物體環境下意圖估計準確率為94.35%,抓取成功率為88.75%。本文提出的方法能夠使假肢手快速地實現面向新物體的、擬人的抓取,為探索假肢手控制提供了新的解決途徑和思路。Yansong Xu, Xiaohui Wang, Junlin Li, Xiaoqian Zhang, Feng Li, Qing Gao, Chenglong Fu, and Yuquan Leng, “A Powered Prosthetic Hand with Vision System for Enhancing the Anthropopathic Grasp,” in IEEE Transactions on Neural Systems and Rehabilitation Engineering, doi: 10.1109/TNSRE.2025.3567392.文章鏈接:https://ieeexplore.ieee.org/document/10988884
冷雨泉教授團隊:新型視覺驅動智能假肢手,擬人化抓握技術突破,助力截肢者重獲生活自信
本文來自互聯網用戶投稿,該文觀點僅代表作者本人,不代表本站立場。本站僅提供信息存儲空間服務,不擁有所有權,不承擔相關法律責任。 如若轉載,請注明出處:http://www.pswp.cn/web/82365.shtml 繁體地址,請注明出處:http://hk.pswp.cn/web/82365.shtml 英文地址,請注明出處:http://en.pswp.cn/web/82365.shtml
如若內容造成侵權/違法違規/事實不符,請聯系多彩編程網進行投訴反饋email:809451989@qq.com,一經查實,立即刪除!相關文章

android 媒體框架之MediaCodec
一、MediaCodec 整體架構與設計思想
MediaCodec 是 Android 底層多媒體框架的核心組件,負責高效處理音視頻編解碼任務。其架構采用 生產者-消費者模型,通過雙緩沖區隊列(輸入/輸出)實現異步數據處理:
輸入緩沖區隊列…

Starrocks Full GC日志分析
GC日志樣例:
[2025-06-03T07:36:06.1770800] GC(227) Pause Full (G1 Evacuation Pause)
[2025-06-03T07:36:06.1960800] GC(227) Phase 1: Mark live objects
[2025-06-03T07:36:06.9480800] GC(227) Cleaned string and symbol table, strings: 47009 processed,…

React從基礎入門到高級實戰:React 高級主題 - React 微前端實踐:構建可擴展的大型應用
React 微前端實踐:構建可擴展的大型應用
引言
在2025年的技術生態中,Web應用的規模和復雜性持續增長,微前端(Micro Frontends)已成為應對大型項目挑戰的主流架構。通過將前端應用拆分為多個獨立模塊,微前…

定時器:中央對齊模式剖析
中央對齊模式(Center-Aligned Mode)下,當配置為 模式3(CMS[1:0] 11) 時,定時器會同時觸發 上溢中斷(ARR中斷) 和 下溢中斷(0中斷),即一個PWM周期…

MySQL強化關鍵_019_索引優化
目 錄 一、最左前綴原則
1.完全使用索引
2.部分使用索引
3.不使用索引
4.效率折損
(1)使用范圍查找
(2)索引斷開 二、索引失效場景
1. 索引列參與運算
2.索引列模糊查詢以“%”開始
3.索引列是字符串類型,查…

【Oracle】安裝單實例
個人主頁:Guiat 歸屬專欄:Oracle 文章目錄 1. 安裝前的準備工作1.1 硬件和系統要求1.2 檢查系統環境1.3 下載Oracle軟件 2. 系統配置2.1 創建Oracle用戶和組2.2 配置內核參數2.3 配置用戶資源限制2.4 安裝必要的軟件包 3. 目錄結構和環境變量3.1 創建Ora…

6年“豹變”,vivo S30系列引領手機進入場景“體驗定義”時代
出品 | 何璽 排版 | 葉媛
5月29日晚,備受用戶期待的vivo S30系列如約而至。
相比前幾代S系列產品,S30系列變化顯著,堪稱“豹變”。首先,其產品打造思路發生了質變,產品體驗更好,綜合競爭力更為強。其次&a…


Rust 學習筆記:使用自定義命令擴展 Cargo
Rust 學習筆記:使用自定義命令擴展 Cargo Rust 學習筆記:使用自定義命令擴展 Cargo Rust 學習筆記:使用自定義命令擴展 Cargo
Cargo 支持通過 $PATH 中的 cargo-something 形式的二進制文件拓展子命令,而無需修改 Cargo 本身。
…

NodeMediaEdge任務管理
NodeMediaEdge任務管理
簡介
NodeMediaEdge是一款部署在監控攝像機網絡前端中,拉取Onvif或者rtsp/rtmp/http視頻流并使用rtmp/kmp推送到公網流媒體服務器的工具。 在未使用NodeMediaServer的情況下,或是對部分視頻流需要單獨推送的需求,也可…

蒲公英盒子連接問題debug
1、 現象描述 2、問題解決 上圖為整體架構圖,其中左邊一套硬件設備是放在機房,右邊是放在辦公室。左邊的局域網連接了可以訪問外網的路由器,利用蒲公英作為旁路路由將局域網暴露在外網環境下。 我需要通過蒲公英作為旁路路由來進行遠程訪問&…

Golang 依賴注入:構建松耦合架構的關鍵技術
依賴注入(Dependency Injection, DI) 是一種設計模式,用于實現控制反轉(Inversion of Control, IoC),通過將依賴項的創建和管理交給外部組件,而不是在類或函數內部直接創建依賴項,從…

Transformer核心原理
簡介
在人工智能技術飛速發展的今天,Transformer模型憑借其強大的序列處理能力和自注意力機制,成為自然語言處理、計算機視覺、語音識別等領域的核心技術。本文將從基礎理論出發,結合企業級開發實踐,深入解析Transformer模型的原…

虛擬線程與消息隊列:Spring Boot 3.5 中異步架構的演進與選擇
企業級開發領域正在經歷一場翻天覆地的巨變,然而大多數開發者卻對此渾然不覺,完全沒有意識到。Spring Boot 3.5 帶來的革命性的虛擬線程 (Virtual Threads) 和增強的響應式能力,絕不僅僅是小打小鬧的增量改進——它們正在從根本上改變我們對異…
)
網絡編程(計算機網絡基礎)
認識網絡
1.網絡發展史
ARPnetA(阿帕網)->internet(因特網)->移動互聯網->物聯網
2.局域網與廣域網 局域網 概念:的縮寫是LAN(local area network),顧名思義,是個本地的網絡,只能實現小范圍短距…

Windows Server部署Vue3+Spring Boot項目
在Windows Server 上部署Vue3 Spring Boot前后端分離項目的詳細步驟如下: 一、環境準備 安裝JDK 17 下載JDK MSI安裝包(如Oracle JDK 或 OpenJDK) 雙擊安裝,配置環境變量: JAVA_HOME:JDK安裝路徑…
(3_模板展開_C++)(哈希表+stringstream))
CCF CSP 第37次(2025.03)(3_模板展開_C++)(哈希表+stringstream)
CCF CSP 第37次(2025.03)(3_模板展開_C) 解題思路:思路一(哈希表stringstream): 代碼實現代碼實現(思路一(哈希表stringstream))&…

數據安全管理進階:81頁 2024數據安全典型場景案例集【附全文閱讀】
《2024 數據安全典型場景案例集》聚焦政務數據安全,覆蓋數據細粒度治理、授權運營、接口安全、系統接入、批量數據共享、使用側監管、風險監測、賬號管控、第三方人員管理、密碼應用等十大典型場景,剖析各場景風險并提供技術方案,如基于 AI 的…

Leetcode 261. 以圖判樹
1.題目基本信息
1.1.題目描述
給定編號從 0 到 n - 1 的 n 個結點。給定一個整數 n 和一個 edges 列表,其中 edges[i] [ai, bi] 表示圖中節點 ai 和 bi 之間存在一條無向邊。
如果這些邊能夠形成一個合法有效的樹結構,則返回 true ,否則返…
)
【ISAQB大綱解讀】LG 1-8:區分顯性陳述和隱性假設(R1)
軟件架構師: 應明確提出假設或先決條件,從而防止隱性假設 知道隱性假設可能會導致利益相關方之間的潛在誤解 1. 應明確提出假設或先決條件,防止隱性假設
為什么重要?
隱性假設是架構風險的溫床 例如:假設“所有服務都…