汽車安全 2030 預測 (功能安全FuSa、預期功能安全SOTIF、網絡安全CyberSecurity):成本、效益與行業影響
到 2030 年,汽車行業將迎來一場安全技術的深度變革,其中 “三重安全防護”(功能安全 FuSa、預期功能安全 SOTIF、網絡安全)備受矚目。據預測,“三重安全防護” 將占整車 BOM 成本的 12%,同時有望降低 39% 的交通事故率。這一預測背后,隱藏著技術與安全的平衡邏輯,以下將從成本構成、安全效益、技術協同及行業影響四維度展開詳細分析:
📊 一、成本結構解析:12%的BOM成本從何而來?
三重安全防護的成本主要由硬件、軟件及驗證體系三部分構成,覆蓋整車全生命周期:
- 硬件成本(占比7%-8%)
-
傳感器冗余系統 :激光雷達價格約 500 美元 / 個,毫米波雷達約 100 美元 / 個,高精度攝像頭約 50 美元 / 個。以 L4 級車型為例,需配置 11-15 個傳感器。比如,一款高端自動駕駛車型,配置 12 個傳感器,僅傳感器成本就達 4800 - 6600 美元。
-
安全芯片與控制器 :滿足 ASIL-D 等級的域控制器價格約 200 美元 / 個,HSM 硬件安全模塊約 30 美元 / 個。
-
電池防護結構 :針對新能源汽車的強化側碰防護框架,增加成本約 2000 元 / 車。隨著新能源汽車的普及,電池安全備受關注,強化的電池防護結構能有效降低碰撞時電池起火、爆炸等風險。
-
下圖展示了不同級別車型傳感器配置數量與成本的大致關系:
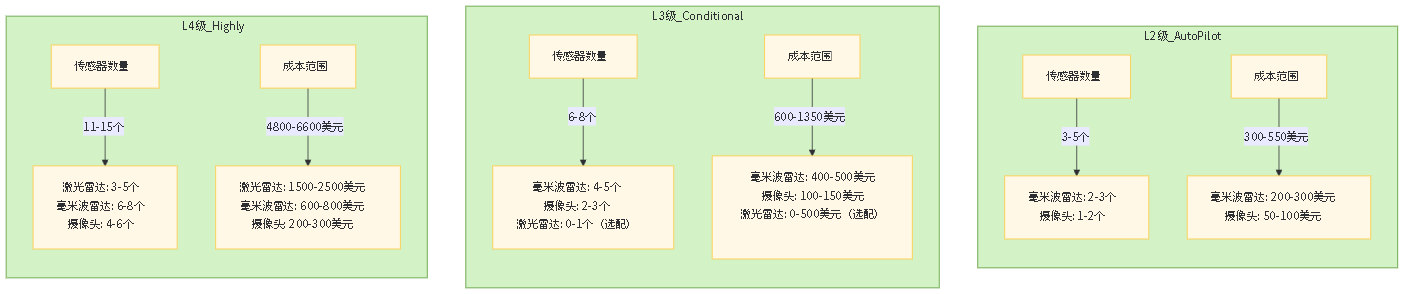
數據說明
- 傳感器單價:
- 激光雷達:500美元/個(L4級車型配置為主)
- 毫米波雷達:100美元/個(全級別通用)
- 高精度攝像頭:50美元/個(全級別通用)
- L2/L3級車型傳感器類型占比:
- 以毫米波雷達+攝像頭為主(激光雷達僅高端L3車型選配)
- L4級車型典型配置(如Robotaxi):
- 激光雷達:3-5個
- 毫米波雷達:6-8個
- 攝像頭:4-6個
關鍵對比維度
| 車型級別 | 核心傳感器差異 | 成本驅動因素 | 典型配置案例 |
|---|---|---|---|
| L2級 | 無激光雷達,依賴毫米波雷達+攝像頭 | 傳感器數量少,單價低 | 特斯拉Autopilot(8攝像頭,無激光雷達) |
| L3級 | 可選配激光雷達(如奧迪A8) | 激光雷達選配導致成本波動大 | 奔馳DRIVE PILOT(1激光雷達+多攝像頭) |
| L4級 | 多激光雷達+大量毫米波雷達/攝像頭 | 激光雷達占比超30%,單價占總成本60%以上 | Waymo Robotaxi(5激光雷達+29攝像頭) |
-
軟件與算法(占比 3%-4%) :
- AI 模型開發 :SOTIF 場景生成算法、網絡入侵檢測模型開發成本超 500 萬 / 車型。開發一款先進的 SOTIF 場景生成算法,需要耗費大量的人力、物力進行數據采集、標注和模型訓練,以確保算法能夠準確地預測各種復雜交通場景下的潛在風險。
- OTA 安全認證 :端云協同加密通信系統占車聯網模塊成本 15%。為了保障車輛 OTA 升級過程中的信息安全,需要建立可靠的加密通信體系,防止黑客攻擊和數據泄露。
-
驗證與認證(占比 1%-2%) :
- 仿真測試平臺 :每日百萬公里級虛擬測試,如奔馳的 SOTIF 平臺,通過高精度的仿真模型和復雜的測試場景,對車輛的安全性能進行全面評估,確保車輛在各種極端工況下的安全性。
- 實車碰撞升級 :滿足新國標側面碰撞測試,成本增加約 1200 元 / 車。新的碰撞測試標準更加嚴格,對車輛的車身結構、安全氣囊等安全裝置提出了更高的要求,促使車企加大在碰撞測試方面的投入。
表:三重安全防護成本分項占比(2030年預測)
| 成本類別 | 占BOM成本比例 | 典型組件 | 成本驅動因素 |
|---|---|---|---|
| 硬件系統 | 7%-8% | 激光雷達、HSM芯片、電池防護結構 | 傳感器冗余、芯片算力提升 |
| 軟件算法 | 3%-4% | SOTIF場景引擎、AEB控制算法 | AI訓練數據量、OTA復雜度 |
| 驗證體系 | 1%-2% | 仿真平臺授權、碰撞測試認證 | 法規升級、測試里程要求 |
| 數據來源:行業成本模型分析 |
?? 二、安全效益機制:39%事故率下降如何實現?
三重防護通過分層攔截風險,覆蓋事故鏈各環節。
-
主動安全層(降低 25% 事故) :
-
AEB 系統升級 :新國標要求 60km/h 避撞靜止車輛,實際高階系統(如佑駕創新 iPilot)已支持 130km/h 剎停。

-
多傳感器融合 :毫米波雷達穿透雨霧 + 攝像頭語義識別,誤觸發率降至 0.1 次 / 萬公里。在惡劣天氣條件下,多傳感器融合的優勢尤為明顯,能夠有效提高車輛對周圍環境的感知準確性,減少誤判和漏判。
-
-
被動安全層(降低 10% 事故) :
- 碰撞標準提升 :2025 版側碰標準將壁障重量從 950kg 增至 1400kg,模擬真實車重分布,骨盆傷害指標要求提高 40%。更高的碰撞標準促使車企優化車輛的車身結構設計,提升乘員保護性能。
- 電池安全設計 :碰撞后 30 分鐘內電池零起火(如比亞迪 CTB 技術)。比亞迪的 CTB 電池車身一體化技術,將電池與車身結構緊密結合,提高了電池在碰撞中的安全性,有效防止電池起火、爆炸等危險情況的發生。
-
網絡安全層(降低 4% 事故) :
- 實時入侵檢測 :CAN 總線指紋技術識別假冒節點(>99.2% 準確率)。通過監測車輛網絡中的數據流量和節點行為,及時發現并阻止潛在的網絡攻擊,保障車輛的行駛安全。
- OTA 安全加固 :防止惡意固件篡改剎車指令(如特斯拉 2024 年阻截率 98.7%)。特斯拉通過完善的 OTA 安全機制,對車輛的軟件更新進行嚴格的安全檢查和驗證,確保車輛在接收和安裝軟件更新時的安全性。
案例 :搭載全棧三重安全的車型(如蔚來 ET7),在 C-NCAP 2024 測試中行人保護得分率 91%,較未搭載車型高 23%。這一案例充分展示了三重安全防護在提升車輛安全性方面的顯著效果,蔚來 ET7 憑借其先進的安全技術,在保護行人安全方面表現出色,為行業樹立了新的標桿。
🔗 三、成本與安全的平衡邏輯
12% 成本投入與 39% 事故下降的 “剪刀差” 源于三重防護的協同效應。
- 技術復用降本 :域控制器同時處理 FuSa 監控、SOTIF 場景預測、網絡加密,減少 30% 冗余硬件。域控制器作為車輛的中央計算單元,能夠整合多種安全功能,實現硬件資源的共享和優化,從而降低硬件成本。
- 軟件定義安全 :OTA 升級使 SOTIF 場景庫持續擴充,無需新增傳感器即可提升性能。通過 OTA 升級,車輛可以不斷接收新的 SOTIF 場景數據和算法優化,提升對復雜交通場景的應對能力,而無需對硬件進行大規模的改動,降低了成本投入。
- 政策杠桿效應 :中國 AEB 新國標強制安裝(2026 年實施),推動毫米波雷達規模化降價(2023-2030 年降幅達 60%)。政府政策的推動作用,促使汽車零部件供應商加大研發投入,提高生產規模,從而降低零部件價格,為車企降低了成本,同時也提高了整個行業的安全水平。
圖:三重防護協同降低全事故鏈風險 :
事故前預防 事故中防護 事故后止損│ │ │├─主動安全層─┐ ├─被動安全層─┐ ├─網絡安全層─┐│AEB/ESP │ │強化車身 │ │入侵阻斷 ││傳感器融合 │───? │安全氣囊 │───? │應急解鎖 ││(降25%事故)│ │(降10%事故)│ │(降4%事故) │└─────────┘ └─────────┘ └─────────┘
🚀 四、行業影響與挑戰
-
市場分化加速 :
- 高端車型 :率先部署激光雷達 + 千 TOPS 算力(成本占比 15%-18%)。高端汽車品牌為了在市場競爭中脫穎而出,不斷提升車輛的安全性能和科技含量,投入大量資源研發和應用先進的安全技術,如激光雷達和高性能芯片,以提供更高級別的自動駕駛輔助功能和更全面的安全保護。
- 經濟車型 :依賴 1V3R(1 攝像頭 + 3 雷達)方案,成本占比壓至 8%-10%。經濟型汽車則更注重成本控制,在滿足基本安全法規要求的基礎上,采用相對簡單但有效的傳感器配置方案,以實現一定的安全性能提升,同時保持價格的競爭力。
-
技術融合難點 :
- 實時性沖突 :加密算法增加網絡延遲(如 AES-256 延時 5ms),影響剎車響應。在車輛的網絡安全防護中,加密算法雖然能夠提高數據的安全性,但也會增加網絡傳輸的延遲,這對于車輛的制動系統等對實時性要求極高的功能來說,可能會產生一定的影響,需要在安全和性能之間找到平衡。
- 場景覆蓋缺口 :極端天氣 SOTIF 驗證需千億公里仿真,算力成本高昂。為了確保車輛在各種極端天氣條件下的安全性能,需要進行大量的仿真測試,但目前的算力水平和測試成本限制了仿真測試的規模和范圍,導致部分極端場景的驗證存在缺口,給車輛的安全性帶來了潛在風險。
-
政策與標準驅動 :
- 聯合國 R155/R156 強制網絡安全認證(2024 年覆蓋歐盟 / 中國) :這些國際標準的實施,推動了全球汽車網絡安全技術的發展和應用,促使車企加強車輛網絡安全防護能力,提高整個行業的網絡安全水平。
- C-NCAP 2024 將 AEB 納入五星評級必備項 :通過將 AEB 系統納入五星評級的必備條件,激勵車企加快 AEB 系統的研發和應用,提高車輛在緊急制動情況下的安全性能,從而提升車輛的整體安全評級,增強市場競爭力。
💎 結論:技術與生命的價值方程式
12% 的 BOM 成本不僅是硬件堆砌,更是覆蓋 “感知 - 決策 - 執行 - 救援” 全鏈路的系統性投資。當 39% 事故下降轉化為每年減少超 20 萬起傷亡(中國交管局 2030 年預測),其社會經濟價值遠超成本本身 —— 這正是汽車工業從 “移動工具” 向 “安全伙伴” 進化核心邏輯。隨著芯片集成度提升和法規標準化,2030 年后三重防護成本有望降至 8%-10%,進一步普惠大眾市場。
參考資料:
https://news.youth.cn/gn/202505/t20250530_16031769.htm
https://www.dongchedi.com/article/7359451799265215027
https://finance.eastmoney.com/a/202505293417545034.html
https://chejiahao.autohome.com.cn/info/15685647



![[Hackers and Painters] 讀書筆記 | 設計模式思想 | LISP](http://pic.xiahunao.cn/[Hackers and Painters] 讀書筆記 | 設計模式思想 | LISP)






)
)
微服務(grpc/grpc消費者))

)
入門 - (1) 相關概念)


:未命名的命名空間)
