

持續更新。。。。。。。。。。。。。。。
【ROS機器人】模塊安裝
- 一、Castle-X機器人底盤
- 1.1 結構概述
- 1.2 驅動執行結構
- 1.3 環境傳感器
- 1.4 電氣系統
- 1.5 Castle-x機器人底盤測試
- 激光雷達傳感器測試及數據可視化
- 超聲波傳感器實時數據獲取
- 防跌落傳感器測試
- 陀螺儀測試
- 鍵盤控制測試
- 里程計測試及數據可視化
- 二、智能導覽模塊安裝與調試
- 三、紫外消殺模塊安裝與調試
- 四、智能機械臂安裝與調試
- 五、物聯網模塊配置與調試
一、Castle-X機器人底盤
1.1 結構概述
Castle-X機器人底盤其整體硬件結構可分為三大部分:分別是驅動執行系統、環境感知系統和電氣系統。
- 驅動執行系統負責機器人的移動管理
- 環境感知系統則負責對機器人周圍環境的感知,通過傳感器獲取周圍環境的信息。
- 電氣系統則是機器人的大腦以及血管動脈,負責機器人的控制、執行、電源供給等
三者互相配合,缺一不可。
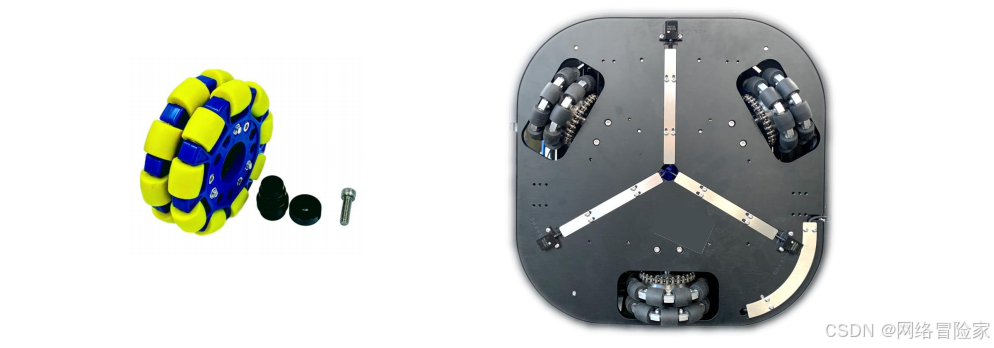
1.2 驅動執行結構
Castle-X機器人底盤驅動執行系統由三個歐米輪互成120度夾角安裝,三個直流減速電機分別帶動三個歐米輪提供服務機器人移動的動力。
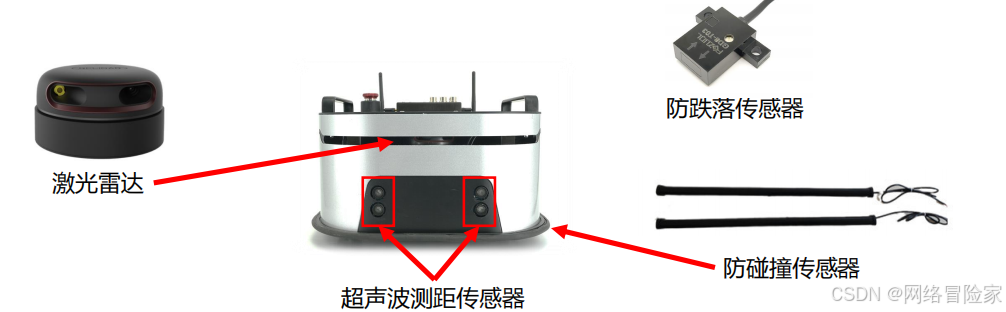
1.3 環境傳感器
安裝了兩個超聲波測距傳感器和一個激光雷達傳感器,使得機器人能夠感知周圍的環境,此外還安裝了三個防跌落傳感器和一個防碰撞傳感器用于判斷機器人當前是否處于安全狀態。
1.4 電氣系統
Castle-x機器人底盤帶有急停按鈕、WIFI模塊,后側還帶有兩個揚聲器&#x




訪問FPGA的專用SPI接口)





)




)
)


