題目
給你一個 m x n 的迷宮矩陣 maze (下標從 0 開始),矩陣中有空格子(用 ‘.’ 表示)和墻(用 ‘+’ 表示)。同時給你迷宮的入口 entrance ,用 entrance = [entrancerow, entrancecol] 表示你一開始所在格子的行和列。
每一步操作,你可以往 上,下,左 或者 右 移動一個格子。你不能進入墻所在的格子,你也不能離開迷宮。你的目標是找到離 entrance 最近 的出口。出口 的含義是 maze 邊界 上的 空格子。entrance 格子 不算 出口。
請你返回從 entrance 到最近出口的最短路徑的 步數 ,如果不存在這樣的路徑,請你返回 -1 。
一、代碼實現
func nearestExit(maze [][]byte, entrance []int) int {m := len(maze)if m == 0 {return -1}n := len(maze[0])if n == 0 {return -1}entranceRow, entranceCol := entrance[0], entrance[1]queue := [][]int{{entranceRow, entranceCol}}maze[entranceRow][entranceCol] = '+' // 標記為已訪問directions := [][]int{{-1, 0}, {1, 0}, {0, -1}, {0, 1}}steps := 0for len(queue) > 0 {levelSize := len(queue)for i := 0; i < levelSize; i++ {cell := queue[0]queue = queue[1:]row, col := cell[0], cell[1]for _, dir := range directions {newRow := row + dir[0]newCol := col + dir[1]// 檢查邊界if newRow < 0 || newRow >= m || newCol < 0 || newCol >= n {continue}// 檢查是否可走且未訪問if maze[newRow][newCol] == '+' {continue}// 檢查是否是出口if isExit(newRow, newCol, entranceRow, entranceCol, m, n) {return steps + 1}// 標記為已訪問并入隊maze[newRow][newCol] = '+'queue = append(queue, []int{newRow, newCol})}}steps++}return -1
}func isExit(r, c, entranceR, entranceC, m, n int) bool {// 位于邊界且不是入口return (r == 0 || r == m-1 || c == 0 || c == n-1) && !(r == entranceR && c == entranceC)
}二、算法分析
1. 核心思路
- 廣度優先搜索(BFS):從入口出發分層擴展,首次到達邊界即最短路徑
- 出口判定:當節點位于迷宮邊界且非入口時視為合法出口
- 狀態管理:使用二維數組記錄訪問狀態,避免重復遍歷
2. 關鍵步驟
- 隊列初始化:將入口位置加入隊列,步數設為0
- 分層遍歷:每次處理一層節點,檢查是否符合出口條件
- 方向擴展:對合法相鄰節點(非墻、未訪問)進行入隊
- 終止條件:隊列為空時返回-1,表示無可行路徑
3. 復雜度
| 指標 | 值 | 說明 |
|---|---|---|
| 時間復雜度 | O(mn) | 最壞情況遍歷所有節點 |
| 空間復雜度 | O(mn) | 維護訪問數組和隊列的空間消耗 |
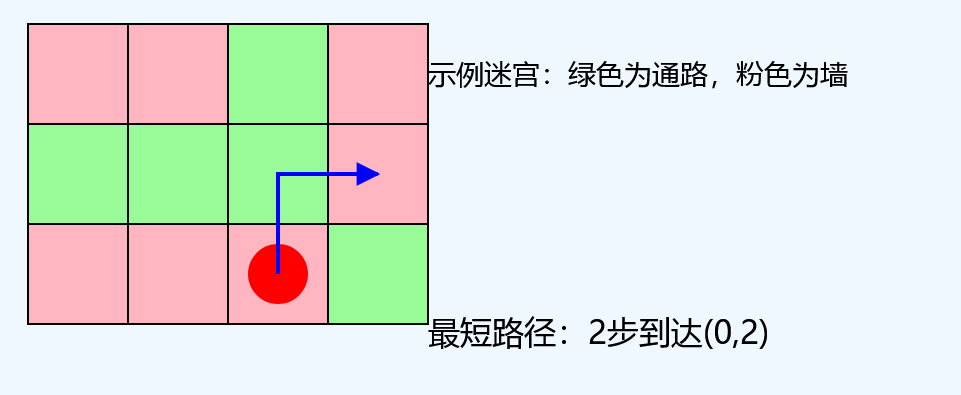
三、圖解示例
四、邊界條件與擴展
1. 特殊場景驗證
- 入口即出口:入口在邊界但不算出口,需尋找其他邊界點
- 全封閉迷宮:所有邊界點均為墻,返回-1
- 螺旋路徑:需繞行多層后到達邊界出口
2. 擴展應用
- 動態障礙物:支持實時更新墻的位置后重新計算路徑
- 多出口優化:尋找所有出口中的最近/最遠距離
- 三維迷宮:擴展為三維空間的路徑搜索問題
3. 其他語言
from collections import dequedef nearestExit(maze, entrance):m, n = len(maze), len(maze[0])directions = [(-1,0), (1,0), (0,-1), (0,1)]visited = [[False]*n for _ in range(m)]q = deque()# 初始化隊列和訪問狀態ent_r, ent_c = entranceq.append((ent_r, ent_c, 0))visited[ent_r][ent_c] = Truewhile q:r, c, steps = q.popleft()# 判斷當前節點是否為出口(邊界且非入口)if (r == 0 or r == m-1 or c == 0 or c == n-1) and (r, c) != (ent_r, ent_c):return steps# 遍歷四個方向for dr, dc in directions:nr, nc = r+dr, c+dcif 0 <= nr < m and 0 <= nc < n and not visited[nr][nc] and maze[nr][nc] == '.':visited[nr][nc] = Trueq.append((nr, nc, steps+1))return -1
五、總結與優化
1. 方法對比
| 方法 | 優勢 | 劣勢 | 適用場景 |
|---|---|---|---|
| BFS | 保證最短路徑 | 空間消耗較大 | 常規迷宮搜索 |
| DFS | 空間效率高 | 無法保證最短路徑 | 路徑存在性驗證 |
| A*算法 | 啟發式搜索效率高 | 需設計啟發函數 | 大型迷宮優化搜索 |
2. 工程優化
- 雙向BFS:從入口和出口同時搜索,減少搜索空間
- 壓縮存儲:使用位運算壓縮訪問狀態數組
- 并行計算:對多個方向進行并行路徑探索
3. 算法擴展
- 權重迷宮:不同路徑消耗不同步數,尋找最小消耗路徑
- 移動模式:支持對角線移動或限定轉向次數
- 動態規劃:預處理各點到邊界的最短距離
 去除無效的干擾!巧妙轉化)





)

)




下載安裝教程 - 兼容老舊Windows系統)


)

)
