地址: https://pan.baidu.com/s/1AtAry19X3BgavLqXcM4scg
提取碼:1234
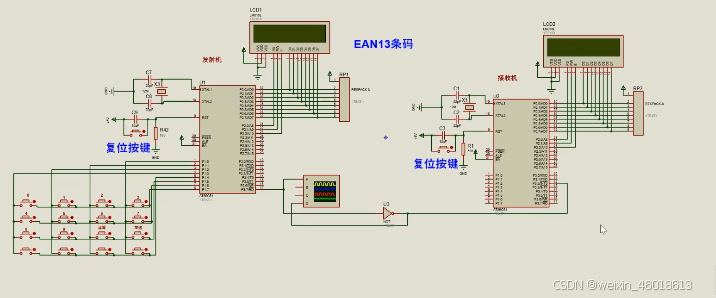
仿真圖:
芯片/模塊的特點:
AT89C52/AT89C51簡介:
AT89C51 是一款常用的 8 位單片機,由 Atmel 公司(現已被 Microchip 收購)生產。它基于標準的 8051 內核,并在此基礎上進行了一些增強和改進。以下是 AT89C51 芯片的詳細介紹:
- 主要特性:
內核: 基于標準的 8051 內核,指令集兼容。
存儲器:
程序存儲器 (Flash ROM): 4KB 可編程 Flash ROM,用于存儲程序代碼。 這意味著代碼可以被擦除和重新編程,方便開發和調試。
數據存儲器 (RAM): 128 字節內部 RAM,用于存儲程序運行時的變量和數據。
工作電壓: 4.0V - 5.5V。
時鐘頻率: 0 MHz - 24 MHz。 芯片可以工作在不同的時鐘頻率下,這影響了指令的執行速度。
I/O 端口: 32 個可編程 I/O 口線,分為 4 個 8 位端口 (P0, P1, P2, P3)。 這些端口可以配置為輸入或輸出,用于連接外部設備。
定時器/計數器: 兩個 16 位定時器/計數器。 用于實現定時和計數功能。
中斷: 5 個中斷源:2 個外部中斷、2 個定時器中斷、1 個串口中斷。 中斷允許單片機響應外部事件,提高系統的實時性。
串行通信: 全雙工 UART 串行端口。 用于與其他設備進行串行通信。
功耗模式: 支持空閑模式和掉電模式,以降低功耗。 空閑模式下,CPU 停止工作,但外設繼續運行;掉電模式下,所有功能都停止工作,功耗最低。
封裝形式: DIP40, PLCC44, TQFP44 等多種封裝形式。
2. 引腳說明 (以 DIP40 為例):
VCC: 電源正極。
GND: 電源地。
P0.0 - P0.7: P0 口,8 位雙向 I/O 口。 具有復用功能,可以作為外部存儲器的地址/數據總線。
P1.0 - P1.7: P1 口,8 位雙向 I/O 口。
P2.0 - P2.7: P2 口,8 位雙向 I/O 口。 在訪問外部存儲器時,提供高 8 位地址。
P3.0 - P3.7: P3 口,8 位雙向 I/O 口。 具有第二功能,例如串口通信、外部中斷、定時器/計數器輸入等。
RST: 復位引腳,高電平有效。
ALE/PROG: 地址鎖存允許/編程脈沖。 在訪問外部存儲器時,用于鎖存 P0 口的低 8 位地址。 在編程時,作為編程脈沖輸入。
PSEN: 外部程序存儲器允許輸出。 用于讀取外部程序存儲器中的指令。
EA/VPP: 外部訪問允許/編程電壓。 當 EA 為高電平時,單片機首先執行內部程序存儲器中的指令;當 EA 為低電平時,單片機只執行外部程序存儲器中的指令。 在編程時,用于施加編程電壓。
XTAL1, XTAL2: 晶振引腳,用于連接外部晶振,提供時鐘信號。
3. 工作原理:
AT89C51 的工作原理和標準的 8051 單片機類似:
復位: 單片機上電后,首先進行復位操作,使單片機進入初始狀態。
取指令: CPU 從程序存儲器中讀取指令。
譯碼: CPU 對指令進行譯碼,確定指令的功能。
執行: CPU 執行指令,例如進行算術運算、邏輯運算、數據傳輸、控制 I/O 口等。
循環: 重復步驟 2-4,直到程序執行完畢或進入中斷服務程序。
4. 應用領域:
AT89C51 應用非常廣泛,包括:
工業控制: 例如電機控制、溫度控制、液位控制等。
儀器儀表: 例如數字萬用表、示波器、頻率計等。
家用電器: 例如洗衣機、空調、電飯煲等。
消費電子: 例如遙控器、玩具、電子鐘等。
通信設備: 例如無線模塊、傳感器網絡等。
5. 編程:
AT89C51 可以使用多種編程語言進行編程,最常用的是 C 語言和匯編語言。
C 語言: C 語言具有結構化、模塊化、可移植性強等優點,適合開發復雜的應用程序。常用的 C 語言編譯器有 Keil C51 等。
匯編語言: 匯編語言可以直接操作硬件,代碼效率高,適合開發對實時性要求高的應用程序。
6. 優點:
成熟可靠: 8051 內核經過多年的發展和應用,非常成熟可靠。
易于學習: 8051 的指令集簡單易懂,學習曲線平緩。
開發工具豐富: 有大量的開發工具和參考資料可供選擇。
價格低廉: AT89C51 芯片價格低廉,適合大批量應用。
7. 缺點:
存儲器容量有限: 4KB Flash ROM 和 128 字節 RAM 相對較小,可能不適合復雜的應用程序。
運算速度較慢: 與現代的 32 位單片機相比,運算速度較慢。
外設功能較少: 外設功能相對簡單,可能需要使用外部擴展芯片。
在使用AT89C52/AT89C51芯片時,為了確保其穩定運行并延長其使用壽命,需注意以下關鍵事項:
- 電源管理
電壓范圍:AT89C52/AT89C51的工作電壓范圍為4.0V至5.5V,確保電源電壓在此范圍內,避免過高或過低的電壓導致芯片損壞。
去耦電容:在VCC和GND引腳之間添加0.1μF的去耦電容,以濾除電源噪聲,確保電源穩定。 - 復位電路
復位引腳(RST):復位引腳需要在上電時保持高電平(至少2個機器周期)以確保芯片正確復位。可以使用RC電路或專用復位芯片來實現可靠的復位。
復位時間:確保復位時間足夠長(通常為10ms以上),以避免復位不完全。 - 時鐘設置
晶振選擇:選擇符合芯片規格的晶振,典型值為12MHz。確保晶振和負載電容(通常為20pF至30pF)匹配,以保證時鐘信號的穩定性。
時鐘引腳:將晶振正確連接到XTAL1和XTAL2引腳,并確保電容接地。 - I/O端口配置
端口模式:在軟件中正確配置I/O端口為輸入或輸出模式,避免端口沖突。
電流限制:每個I/O引腳的最大輸出電流為20mA,整個端口的電流不應超過80mA,以防止芯片過熱或損壞。 - 編程與擦寫
編程器:使用支持AT89C52/AT89C51的編程器進行代碼燒錄,確保編程電壓和時序正確。
擦寫次數:AT89C52/AT89C51的Flash存儲器支持約1000次擦寫操作,避免頻繁擦寫以延長芯片壽命。 - 外部存儲器接口
地址和數據線:如果需要擴展外部存儲器,確保地址線和數據線連接正確,并添加適當的鎖存器(如74HC373)以分離地址和數據。
控制信號:正確連接ALE、PSEN、EA等控制信號,以確保外部存儲器的正常訪問。 - 熱管理
散熱:在高負載或高溫環境下,確保芯片有良好的散熱條件,必要時可以添加散熱片。
工作溫度:芯片的工作溫度范圍為0°C至70°C(商業級),避免在超出此范圍的環境中使用。 - 調試與測試
功能測試:在開發過程中,進行充分的功能測試和壓力測試,確保所有模塊正常工作。
調試工具:使用邏輯分析儀、示波器等工具進行調試,觀察信號波形,幫助排查問題。 - 可靠性與安全性
防靜電:在處理芯片時,佩戴防靜電手環或使用防靜電工作臺,避免靜電放電(ESD)損壞芯片。
電路保護:在電源和I/O端口添加保護電路(如TVS二極管、保險絲等),以提高電路的抗干擾能力和安全性。 - 特殊功能寄存器(SFR)
寄存器配置:在使用定時器、串口、中斷等特殊功能時,正確配置相關的特殊功能寄存器(SFR),以確保功能正常運行。
中斷優先級:合理設置中斷優先級,避免高優先級中斷長時間占用CPU資源,導致低優先級中斷無法響應。 - 低功耗模式
空閑模式:在不需要全速運行時,可以進入空閑模式以降低功耗。
掉電模式:在長時間不使用時,可以進入掉電模式以進一步降低功耗,但需注意在此模式下只有外部中斷或硬件復位才能喚醒芯片。
LCD1602液晶屏的特點:
LCD1602液晶屏是一種常見的字符型液晶顯示模塊,具有以下更詳細的特點:
- 顯示特性:
字符矩陣: 每個字符由 5x8 或 5x10 的點陣組成。 這意味著你可以通過控制這些點來顯示不同的字符。
顯示容量: 16 字符/行 x 2 行。總共 32 個字符的顯示空間。
可視角度: 通常在一定范圍內具有良好的可視角度,但視角過大或過小可能會導致對比度下降或顯示模糊。
對比度調節: 大多數 LCD1602 模塊都帶有對比度調節功能,可以通過一個電位器來調節顯示的清晰度。
可定制字符 (CGRAM): LCD1602 允許用戶自定義少量字符,通常是 8 個。 這允許你顯示一些簡單的符號或圖形,但自定義過程相對復雜。
2. 接口特性:
并行接口: LCD1602 使用并行接口進行數據傳輸。 這意味著多個數據位同時傳輸,通常使用 4 位或 8 位數據線。
4 位模式: 節省 I/O 口線,但數據傳輸速度較慢。
8 位模式: 數據傳輸速度較快,但占用更多的 I/O 口線。
控制信號: 主要的控制信號包括:
RS (Register Select): 用于選擇是寫入指令寄存器還是數據寄存器。
RW (Read/Write): 用于選擇是讀取 LCD 的數據還是向 LCD 寫入數據。
E (Enable): 使能信號,用于啟動數據傳輸。
背光控制: 有些 LCD1602 模塊帶有背光控制引腳,可以通過控制該引腳來開關背光。
3. 控制器特性 (HD44780 兼容):
指令集: HD44780 控制器有一套標準的指令集,用于控制 LCD 的各種功能,例如:
清屏: 清除 LCD 上的所有顯示內容。
光標控制: 控制光標的移動和顯示方式。
顯示模式設置: 設置顯示模式,例如光標是否閃爍,字符是否移動等。
初始化: 對 LCD 進行初始化,設置顯示模式和接口方式。
數據讀寫: 通過控制 RS 和 RW 信號,可以讀取 LCD 的狀態和數據,也可以向 LCD 寫入指令和數據。
忙標志: HD44780 控制器會設置一個忙標志,用于指示 LCD 是否正在執行操作。 在寫入指令或數據之前,需要先讀取忙標志,確保 LCD 處于空閑狀態。
4. 電氣特性:
工作電壓: 通常為 5V,也有 3.3V 的版本。
工作電流: 較低,通常在幾毫安到幾十毫安之間。
背光電流: 背光電流相對較高,取決于背光的類型和亮度。
5. 優缺點:
優點:
易于使用:控制方式簡單,容易上手。
價格低廉:成本較低,適合各種應用。
功耗低:適合電池供電的應用。
顯示清晰:能夠清晰地顯示字符。
尺寸小巧:便于集成到各種設備中。
缺點:
顯示內容有限:只能顯示 ASCII 字符,無法顯示復雜的圖形或漢字。
可視角度有限:視角過大或過小可能會導致顯示效果不佳。
響應速度較慢:與 OLED 等顯示技術相比,響應速度較慢。
需要外部控制器:需要使用 HD44780 兼容的控制器進行驅動。
矩陣鍵盤的工作原理:
- 硬件連接:
行列線: 矩陣鍵盤由若干行線 (Row) 和列線 (Column) 組成,按鍵位于行線和列線的交叉點上。
連接方式: 每個按鍵的一端連接到一條行線,另一端連接到一條列線。
I/O 口: 行線和列線分別連接到微控制器的 I/O 端口。例如,一個 4x4 的矩陣鍵盤需要 4 根行線和 4 根列線,總共占用 8 個 I/O 口。
2. 工作原理 (掃描過程):
矩陣鍵盤的工作原理基于行列掃描法,通過循環掃描行線和列線來檢測按鍵狀態。 通常的掃描過程如下:
步驟 1: 設置行線為輸出,列線為輸入 (或者反過來)。
步驟 2: 行掃描 (以行線為輸出為例)。
方法: 逐行輸出低電平,其余行輸出高電平。 例如,先設置第一行為低電平,其余行為高電平,然后讀取列線的狀態。
讀取列線: 讀取所有列線的電平。
如果某一列為低電平,則說明該列與當前輸出低電平的行線相交處的按鍵被按下。
如果所有列線都為高電平,則說明當前行沒有按鍵被按下。
步驟 3: 重復行掃描。 依次將每一行設置為低電平,并讀取列線狀態,直到所有行都掃描完畢。
步驟 4: 列掃描 (可選,用于消除抖動和提高可靠性)。
如果行掃描檢測到有按鍵按下,可以進行列掃描來進一步確認。
方法: 類似于行掃描,逐列輸出低電平,并讀取行線狀態。
確認按鍵: 如果行掃描和列掃描都檢測到同一個按鍵被按下,則可以確認該按鍵確實被按下了。
3. 消抖處理:
機械抖動: 機械按鍵在按下或釋放時,會產生短暫的抖動,導致微控制器多次檢測到按鍵信號。
消抖方法:
軟件消抖: 在程序中加入延時,等待按鍵穩定后再讀取按鍵狀態。 例如,檢測到按鍵按下后,延時 10-20 毫秒,再次讀取按鍵狀態,如果仍然是按下狀態,則確認按鍵被按下。
硬件消抖: 使用 RC 濾波電路來消除抖動。
4. 舉例說明 (4x4 矩陣鍵盤):
假設有一個 4x4 的矩陣鍵盤,行線為 Row1-Row4,列線為 Col1-Col4。
行掃描:
Row1 = 0, Row2 = 1, Row3 = 1, Row4 = 1; 讀取 Col1-Col4。 如果 Col2 = 0,則說明 Row1 和 Col2 交叉處的按鍵被按下。
Row1 = 1, Row2 = 0, Row3 = 1, Row4 = 1; 讀取 Col1-Col4。
Row1 = 1, Row2 = 1, Row3 = 0, Row4 = 1; 讀取 Col1-Col4。
Row1 = 1, Row2 = 1, Row3 = 1, Row4 = 0; 讀取 Col1-Col4。
確定按鍵: 根據行掃描和列掃描的結果,可以確定哪個按鍵被按下。
- 優點:
節省 I/O 口: 與直接連接方式相比,矩陣鍵盤可以使用更少的 I/O 口控制更多的按鍵。
成本低: 硬件成本較低,只需要簡單的導線和按鍵。
6. 缺點:
軟件復雜: 需要編寫掃描程序來檢測按鍵狀態,增加了軟件的復雜性。
多鍵同時按下問題: 如果多個按鍵同時按下,可能會導致檢測錯誤 (串鍵)。 一些高級的矩陣鍵盤設計可以解決這個問題。
 流提取運算符的重載和const成員)










)







)