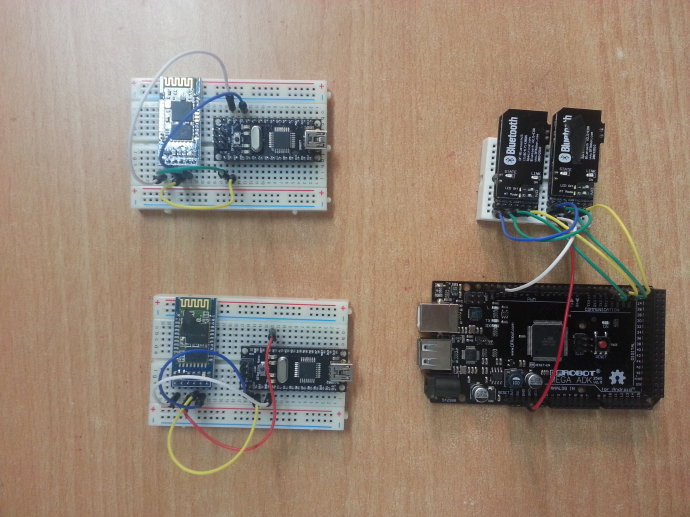
一直想做無線傳感器,通過藍牙來接收數據,無奈因為arduino接收串口數據的一些問題,一直擱到現在。因為學校里給學生開了選修課,所以手邊有一些nano和mega可以使用,所以就做了用兩個nano加上兩個藍牙模塊來發射數據,用mega加兩個藍牙模塊來接收數據。因為mega可以同時使用4路串口,所以考慮用mega來作為主控機,用來接收來自傳感器的數據,每個傳感器加一個nano和藍牙來無線發射數據。
因為是測試,所以在nano中寫了一個簡單的發射信號的語句。以下四nano中的程序:
————————————————我是分界線——————————————————————
int i=1;
void setup() {?
??Serial.begin(9600);???}
??void loop(){
?????????Serial.print(i);
???????Serial.print("$");
???????delay(50);
???????i++;????????
????}
————————————————我是分界線——————————————————————
以下是mega中的程序:
——————————————————我是分界線————————————————————————
String comdata = "";
String shuju="";
String shuju2="";
int i;
void setup()
?{
?????Serial.begin(9600);
?????Serial1.begin(9600);
?????Serial2.begin(9600);
?}
void loop()
?{
?????while (Serial1.available() > 0)?
?????{
?????????shuju += char(Serial1.read());
?????????delay(2);
?????}
?????while (Serial2.available() > 0)
?????{
???????shuju2 +=char(Serial2.read());
???????delay(2);
?????}
?????if (shuju.length() > 0)
?????{
?????????i=shuju.indexOf("$");
?????????if(i!=-1){
?????????comdata=shuju.substring(0,i);
?????????Serial.print("#1=");???????
?????????Serial.print(comdata);
?????????Serial.println("$");
?????????shuju=shuju.substring(i+1,shuju.length());
?????????comdata = "";
?????????i=0;
?????????}
?????}
???????if (shuju2.length() > 0)
?????{
?????????i=shuju2.indexOf("$");
?????????if(i!=-1){
?????????comdata=shuju2.substring(0,i);
?????????Serial.print("#2=");
??????????Serial.print(comdata);
??????????Serial.println("$");
?????????shuju2=shuju2.substring(i+1,shuju2.length());
?????????comdata = "";
?????????i=0;
?????????}????}?}
——————————————我是分界線————————————————————
上篇忘記介紹藍牙模塊的設置了,如果想要利用兩路藍牙來接收數據,那么這兩路藍牙必須設置不同的密碼,以下是藍牙模塊的設置方法,可以將藍牙模塊接到串口模塊上,然后里喲你串口軟件發指令給藍牙模塊,以下設置是針對DFrobot的藍牙模塊的,它上面有開關可以設置接收命令狀態。如果不是DFrobot的藍牙模塊,只要將KEY針腳接高電平就是可以接受命令狀態。將兩個藍牙模塊設置為主,然后設置不同的密碼。再將另外兩個設置為從,設置對應主藍牙的密碼。以下是具體的命令設置:
在發送欄中輸入AT(不分大小寫),然后點擊發送,可看見模塊返回OK,這表示AT指令通訊正常。當AT指令設置完畢后,將2號開關AT Mode撥到2端退出AT命令模式,重新上電后設置才生效。
1.AT指令集如下:
| 指令 | 響應 | 參數 |
| AT | OK | 無 |
2.模塊重啟指令:
| 指令 | 響應 | 參數 |
| AT+RESET | OK | 無 |
3.設置和查詢模塊連接模式:
當模塊無法被適配器、主機連接時,需配置該參數,配置為AT+CMODE=1。
| 指令 | 響應 | 參數 |
| AT+CMODE=< Param > | OK | Param: 0 —— 指定藍牙地址連接模式 (指定藍牙地址由綁定指令設置) 1 —— 任意藍牙地址連接模式 (不受綁定指令設置地址的約束) 默認連接模式:0 |
| AT+CMODE? | +CMODE: < Param > OK |
?
4.設置和查詢模塊角色:
當模塊無法被適配器、主機搜索到時,需配置該參數,配置為從角色。
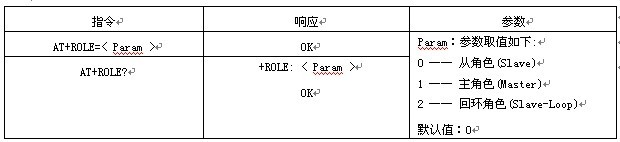
模塊角色說明:
Slave(從角色) ——被動連接,可以和任意藍牙適配器配對使用;
Master (主角色)——查詢周圍從設備,并主動發起連接,從而建立主、從藍牙設備間的透明數據傳輸通道。
Slave-Loop(回環角色) ———被動連接,接收遠程藍牙主設備數據并將數據原樣返回給遠程藍牙主設備;
5.設置和查詢配對碼:

6.設置和查詢串口參數:
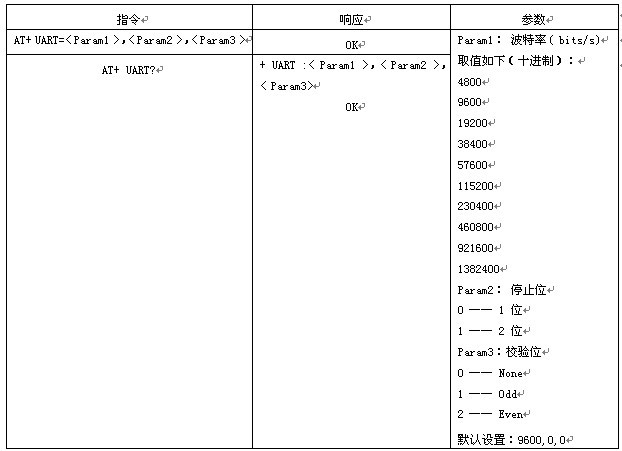
舉例:設置串口波特率:115200,1位停止位,無校驗
AT+ UART=115200,0,0\r\n
OK
AT+ UART?
+UART:115200,0,0
OK
注:在應用中,選擇1位停止位,無校驗。



)





![鴻蒙 arkts 實現手機號中間四位隱藏, 可以使用 substring [ 簡單適用新手 ]](http://pic.xiahunao.cn/鴻蒙 arkts 實現手機號中間四位隱藏, 可以使用 substring [ 簡單適用新手 ])


方法)

)




