Forecasting from LiDAR via Future Object Detection
基礎信息
- 論文:cvpr2022
- paper https://openaccess.thecvf.com/content/CVPR2022/papers/Peri_Forecasting_From_LiDAR_via_Future_Object_Detection_CVPR_2022_paper.pdf
- github:https://github.com/neeharperi/FutureDet?tab=readme-ov-file
- 單位:Carnegie Mellon University,RWTH Aachen University,TUM Munich,Argo AI
摘要
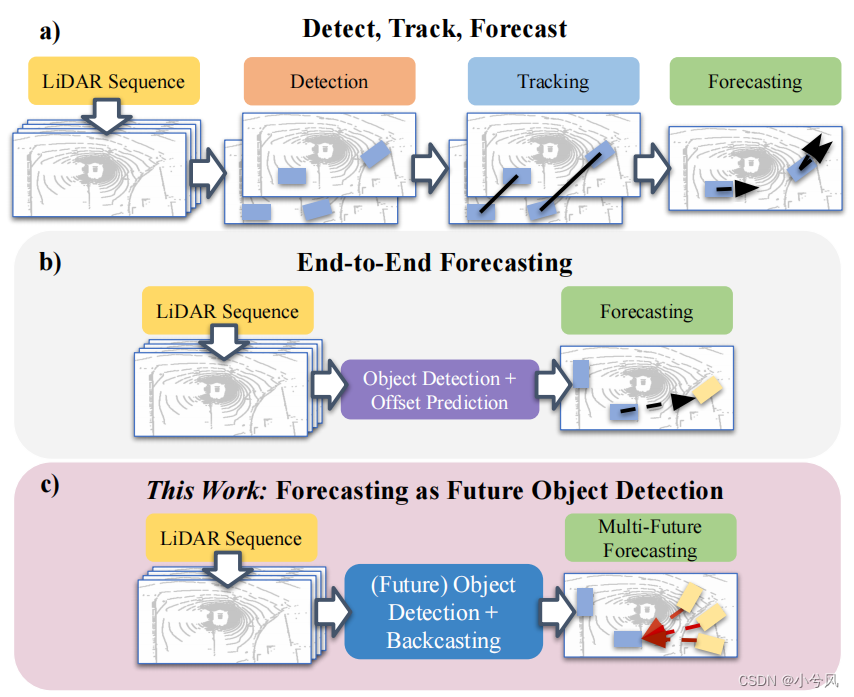
1.目標檢測和預測是具身感知的基本組成部分。
2. 然而,這兩個問題目前都是孤立地進行研究
3. 在本文中,我們提出了一種端到端基于點云數據的端到端檢測和運動預測方法,而不是根據一些真值。
4. 我們不是預測當前的幀位置再向前預測,而是直接預測未來的物體位置和反推每個軌跡的起點
5. 與其他模塊化或端到端基線相比,我們的方法不僅提高了整體的準確性,而且還促使我們重新思考顯式跟蹤在具體化感知中的作用。
6. 此外,通過以多個方式連接未來和當前位置,我們的方法能夠推斷多個未來,這是以前被認為是端到端方法困難的能力。
7. 我們在流行的nuScenes數據集上進行了廣泛的實驗,并證明了我們的方法的經驗有效性
8. 此外,我們還研究了對端到端設置重用標準預測指標的適當性,并發現了一些允許我們構建簡單的基線來博弈這些指標的限制。
9. 我們通過一套新的聯合預測和檢測度量來解決這個問題,該度量將常用的AP度量從檢測社區擴展到度量預測精度。
10. 我們的代碼可以在GitHub上找到。


(持續更新ing))
創建一個簡單的SpringBoot工程)


MVC與Web環境)












