目錄
一、獲取uC/OS-III源碼
二、移植源代碼
(1)建立工程文件
(2)移植uC/OS-III源碼
(3)添加工程組件和頭文件路徑?
(4)添加頭文件路徑?
三、修改代碼
總結
一、獲取uC/OS-III源碼
官網下載地址:http://micrium.com/downloadcenter/
下載的詳細操作可借鑒此博客“STM32F103C8T6移植uC/OS-III基于HAL庫超完整詳細過程_ostimedlyhmsm(0,0,0,800);-CSDN博客
二、移植源代碼
(1)建立工程文件
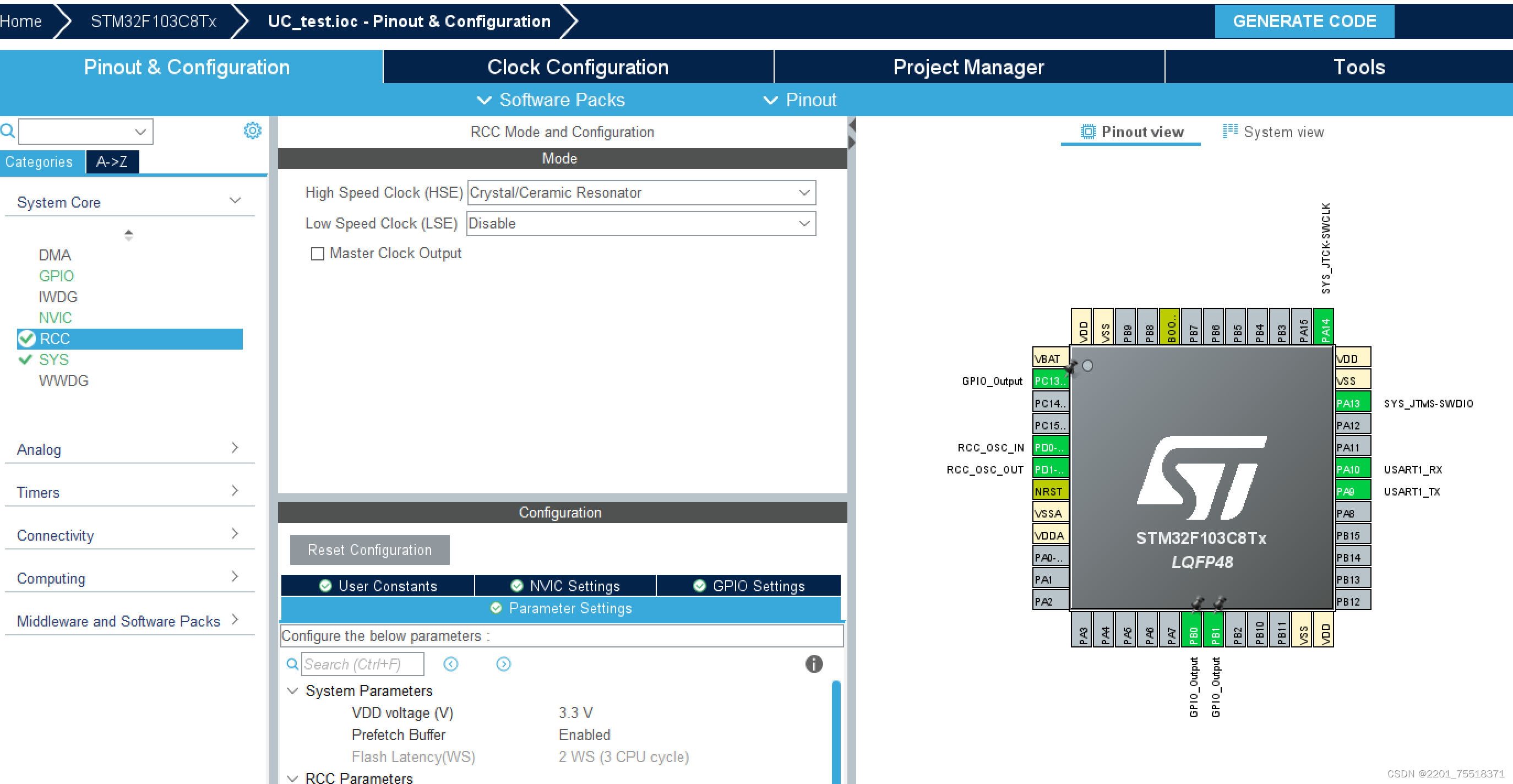
1、配置RCC為Crystal/Ceramic Resonator
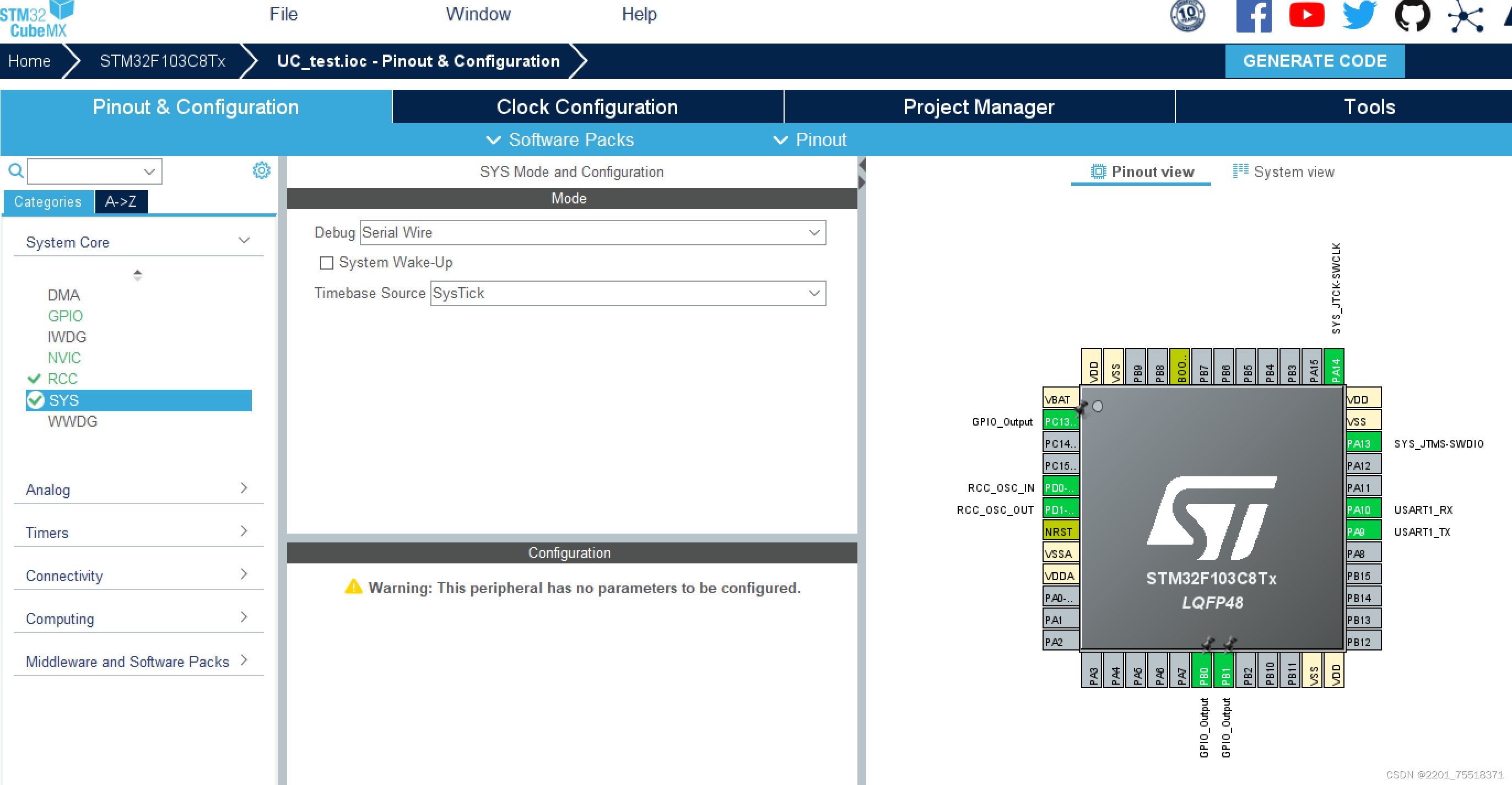
2、選擇調試接口,點擊 System Core,選擇SYS,在右側彈出的菜單欄中選 Serial Wire
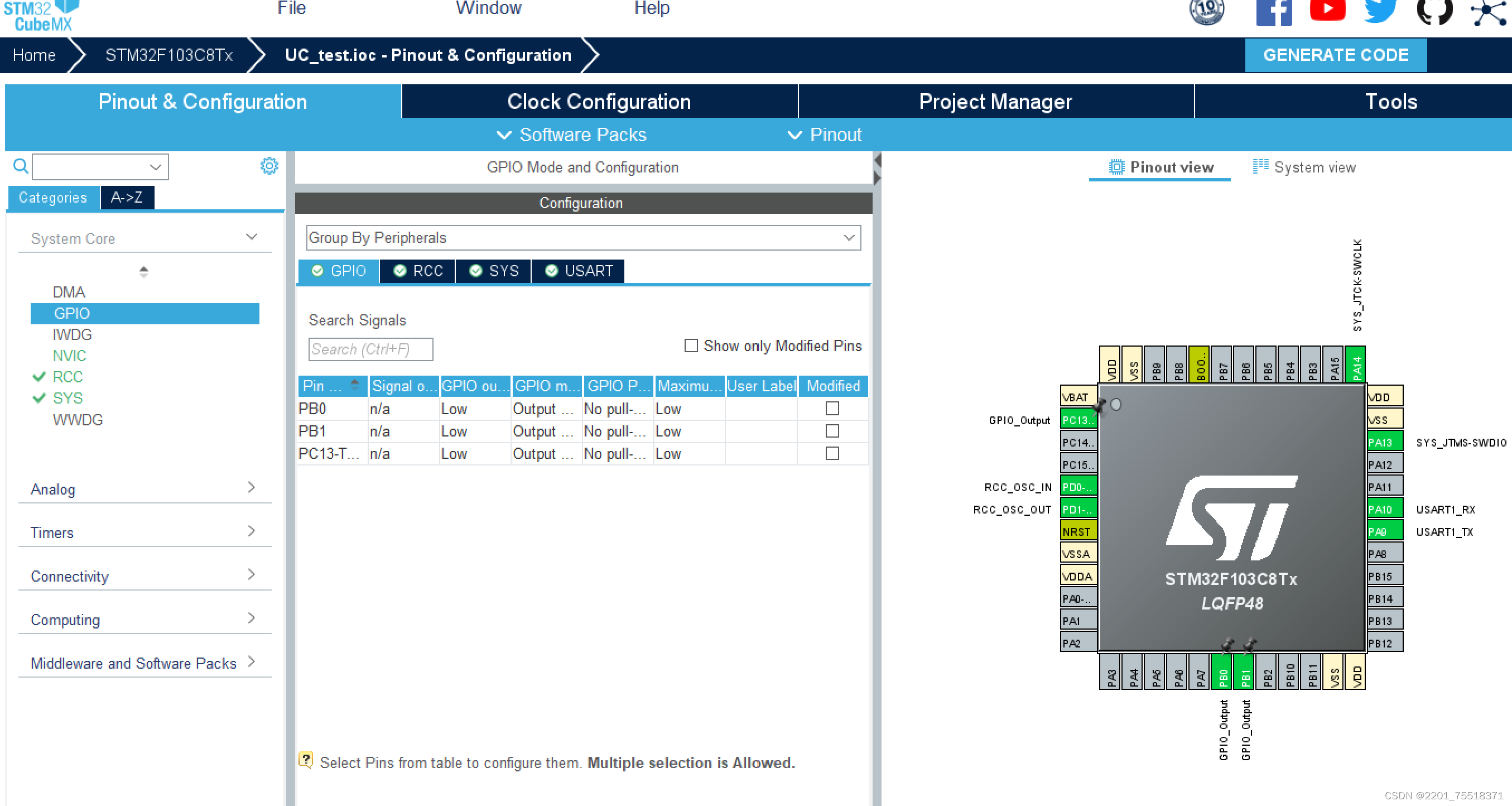
3、配置PC13、PB0、PB1為GPIO_Output?
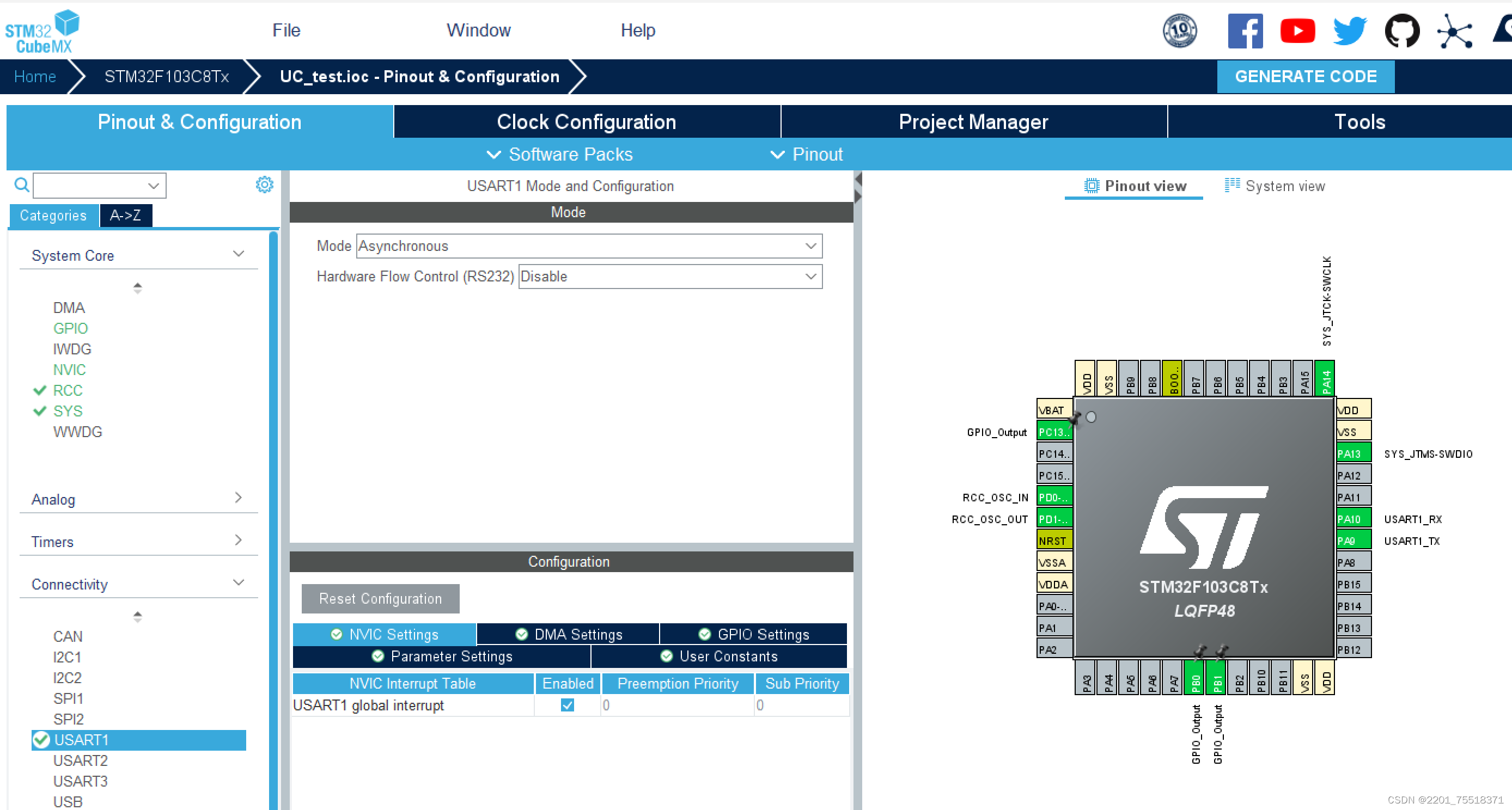
4、配置USART1
?
5、將時鐘設置為72MHz
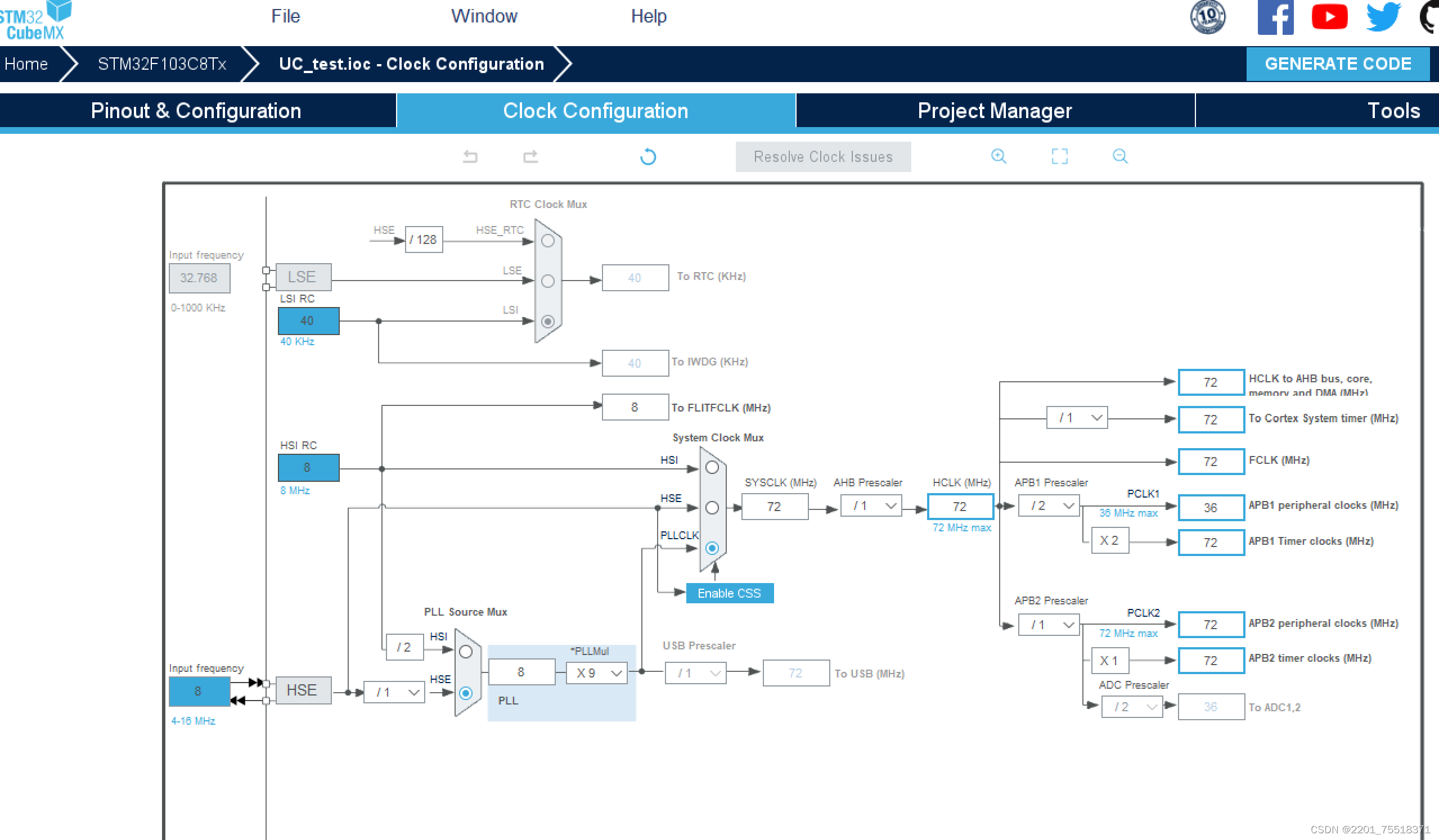 ?之后就可以生成項目
?之后就可以生成項目
(2)移植uC/OS-III源碼
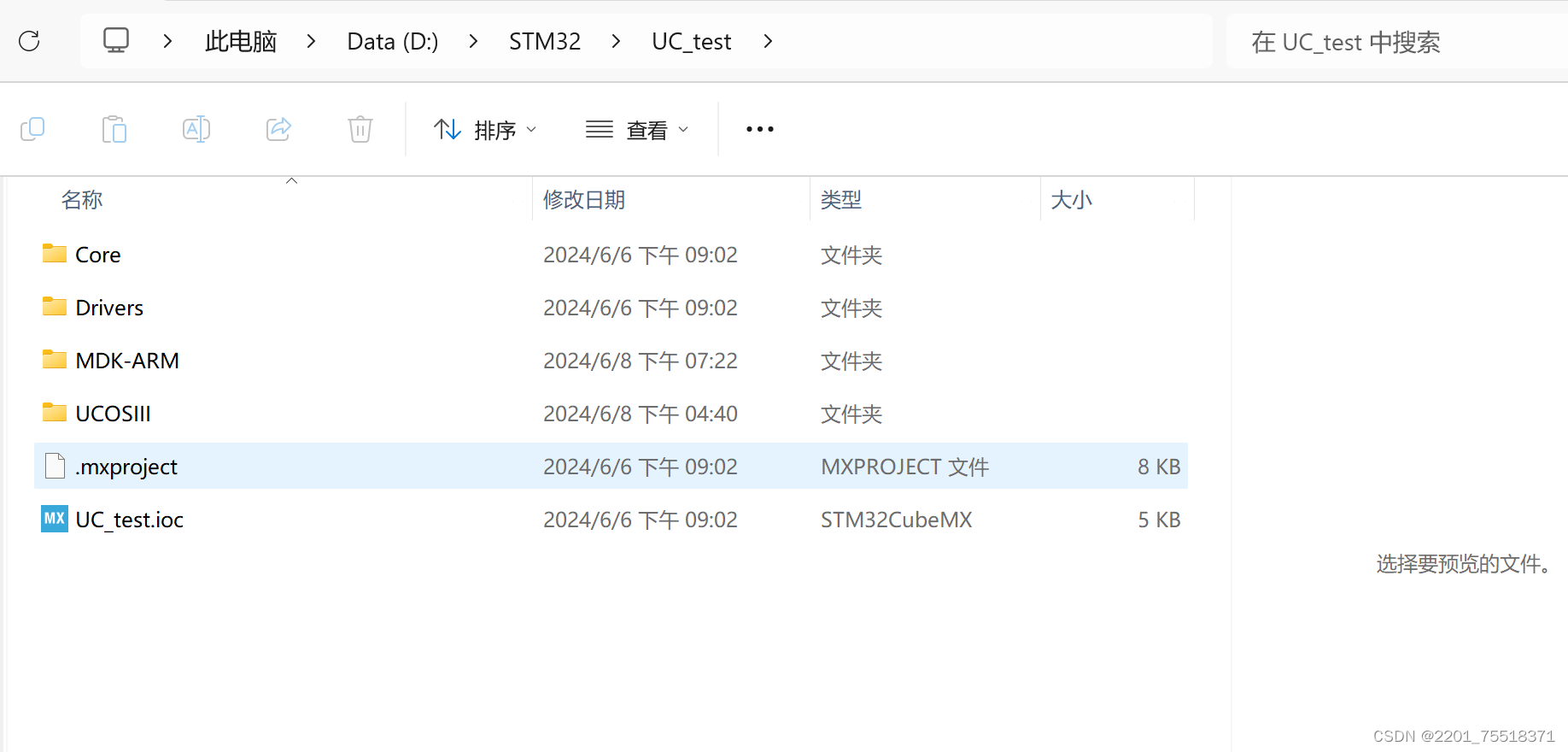
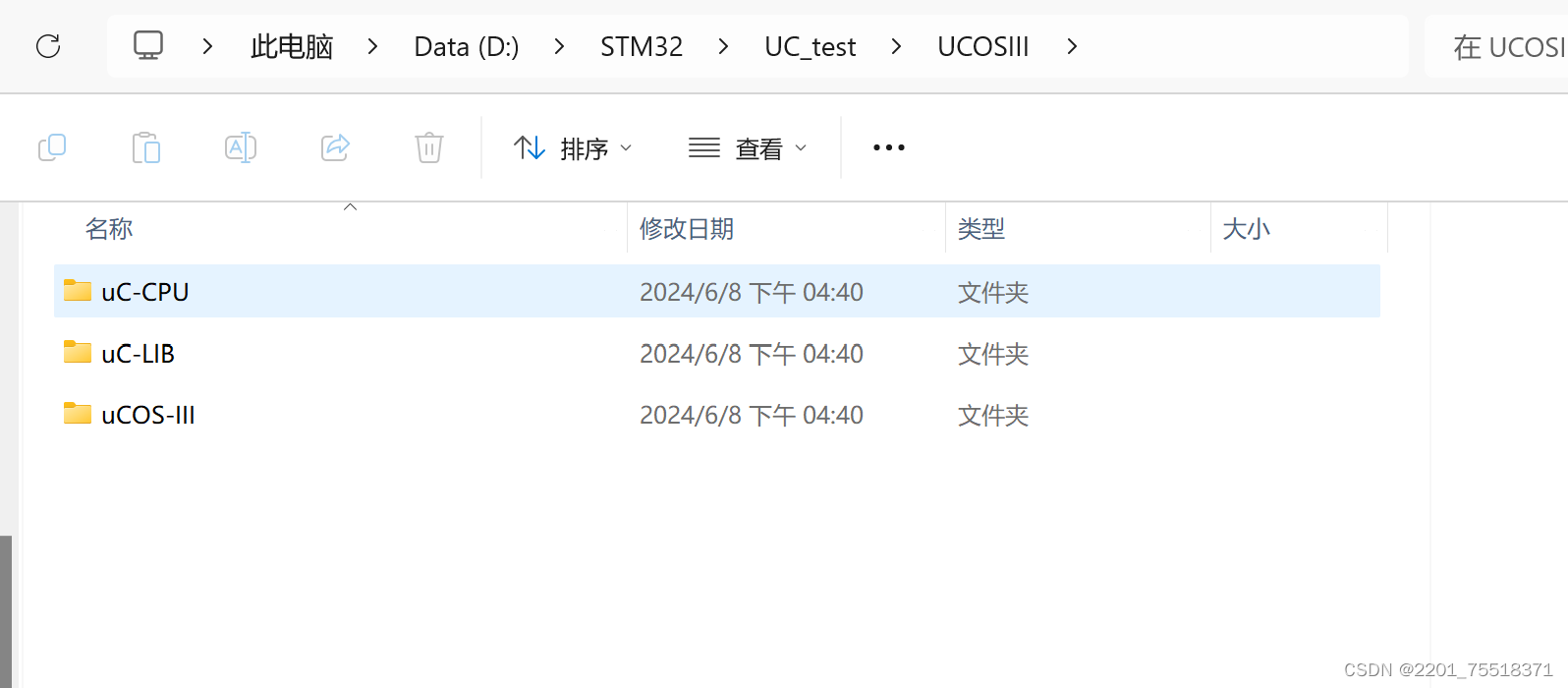
1、在生成的keil工程文件夾f103c8_uCOSIII_1_test中新建一個 UCOSIII 的文件夾,將我們下載的源代碼中三個文件夾: Uc-CPU、 uC-LIB、 Ucos-III 復制到我們新建的文件夾中:
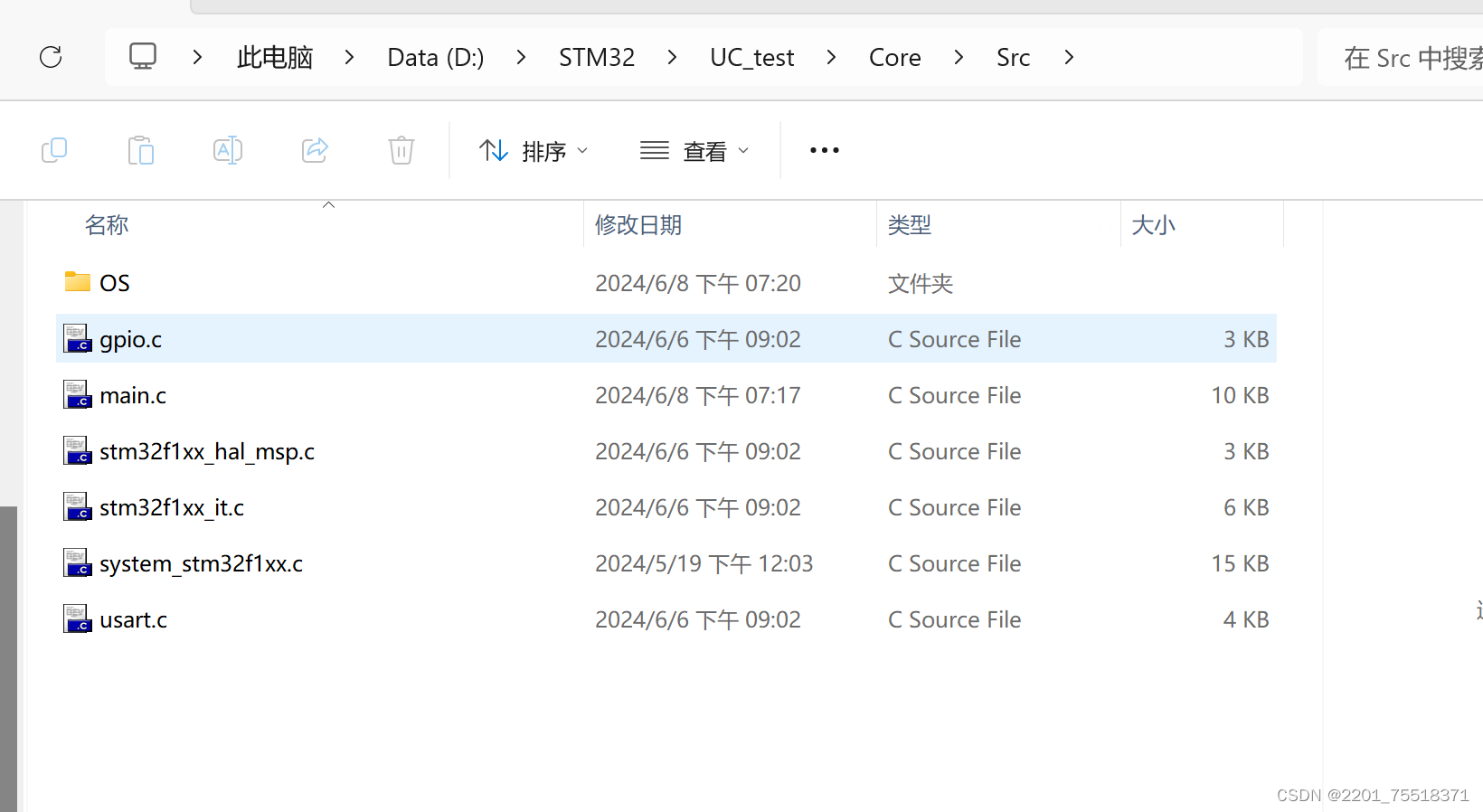
 ?在Src文件夾下新建一個OS文件夾?
?在Src文件夾下新建一個OS文件夾?
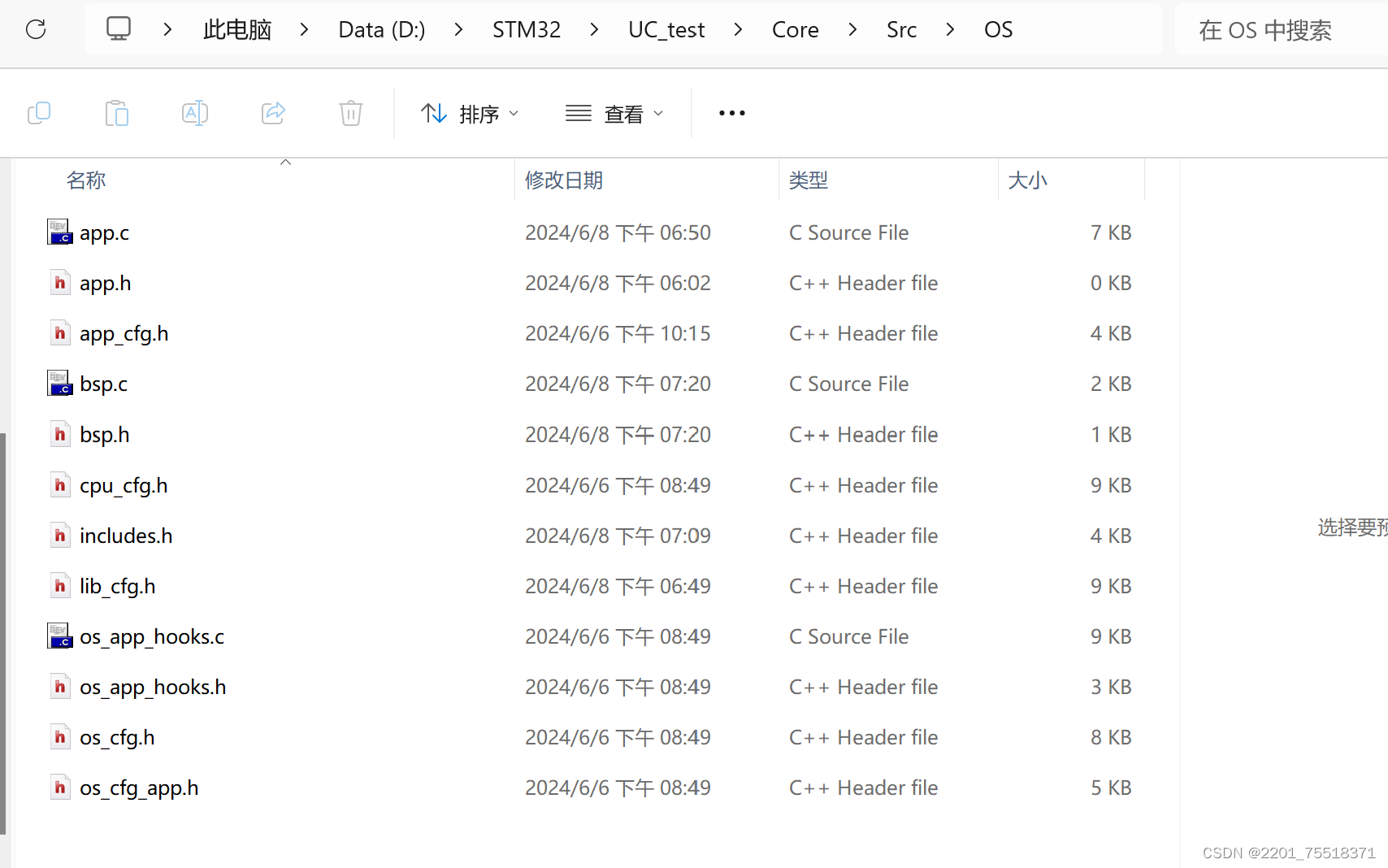
將剛才下載源碼打開,將路徑:uCOS-III 下的文件:
app.c 、 app_cfg.h 、 cpu_cfg.h 、 includes.h 、 lib_cfg.h 、 os_app_hooks.c 、os_app_hook.h、os_cfg.h、os_cfg_app.h復制到上一步建立的OS文件夾中,同時新建三個空白文件: bsp.c、bsp.h、app.h
(3)添加工程組件和頭文件路徑?
打開f103c8_uCOSIII_1_test工程, 按照如圖所示添加六個新的組:?bsp、uCOSIII_CPU、 uCOSIII_LIB、 uCOSIII_Ports、 uCOSIII_Source、 OS_cfg
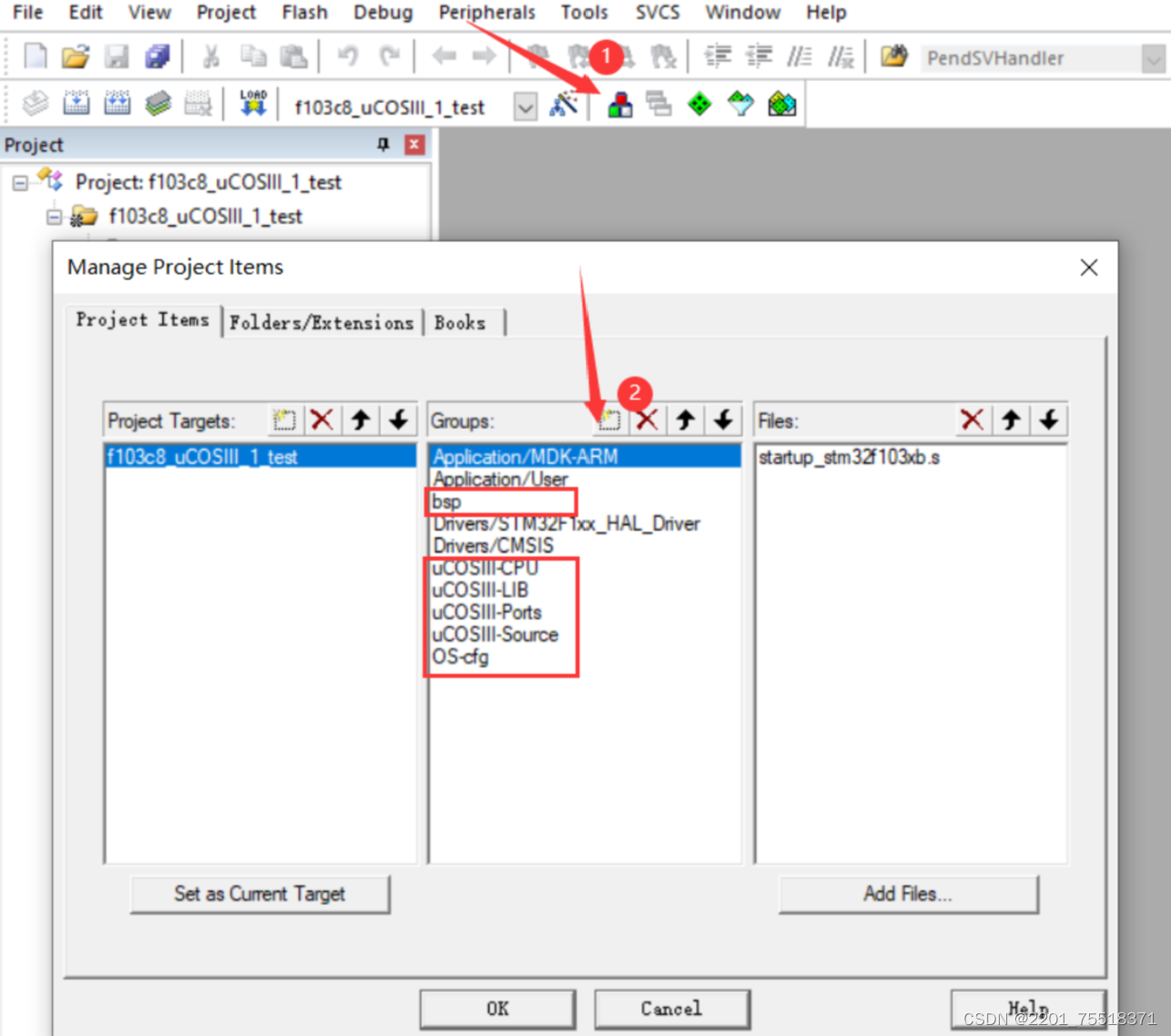
將其中 bsp.c 和 bsp.h文件添加至 bsp 組中,將 app.c 添加進 Application/User 組中
 ?
?
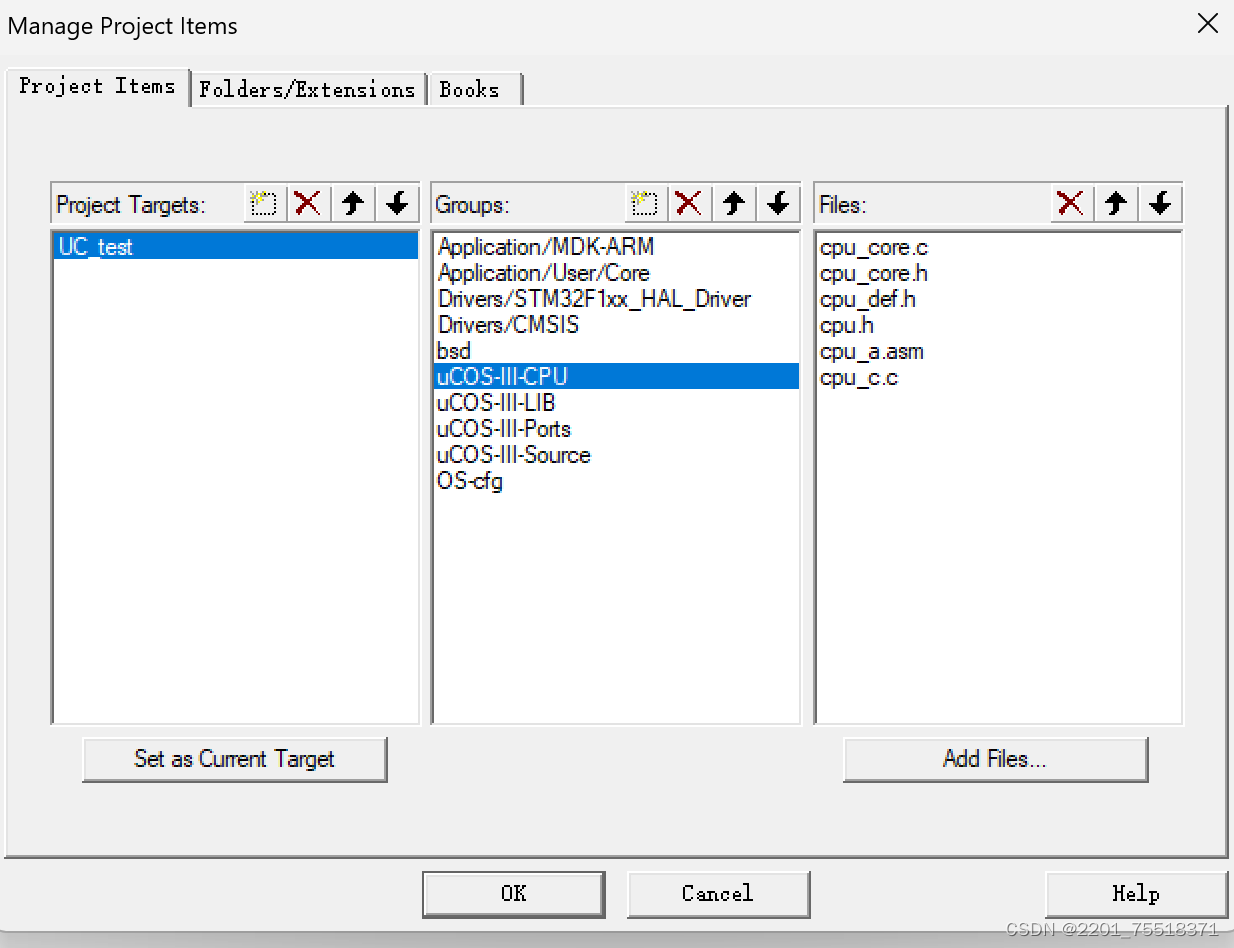
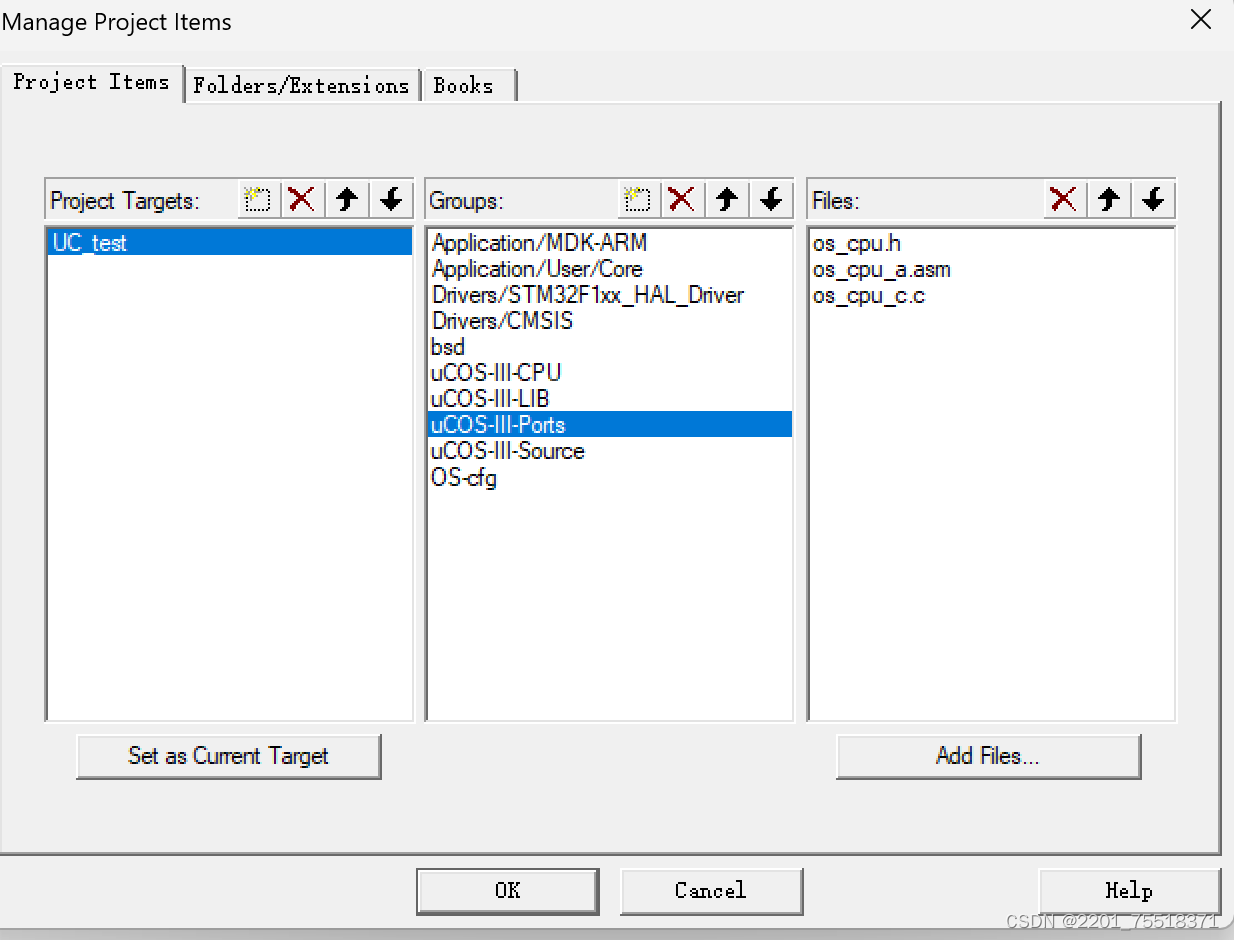
uCOSIII_CPU 組件, 點擊 Add Files…按鈕,將文件目錄跳轉至: UCOSIII/uC-CPU, 選擇 ALL files 文件類型,將其中的三個文件點擊 Add 添加, 然后再打開: ARM-Cortex-M3\RealView, 同樣選擇 ALL files 文件類型,將三個文件添加進 uCOSIII_CPU 組
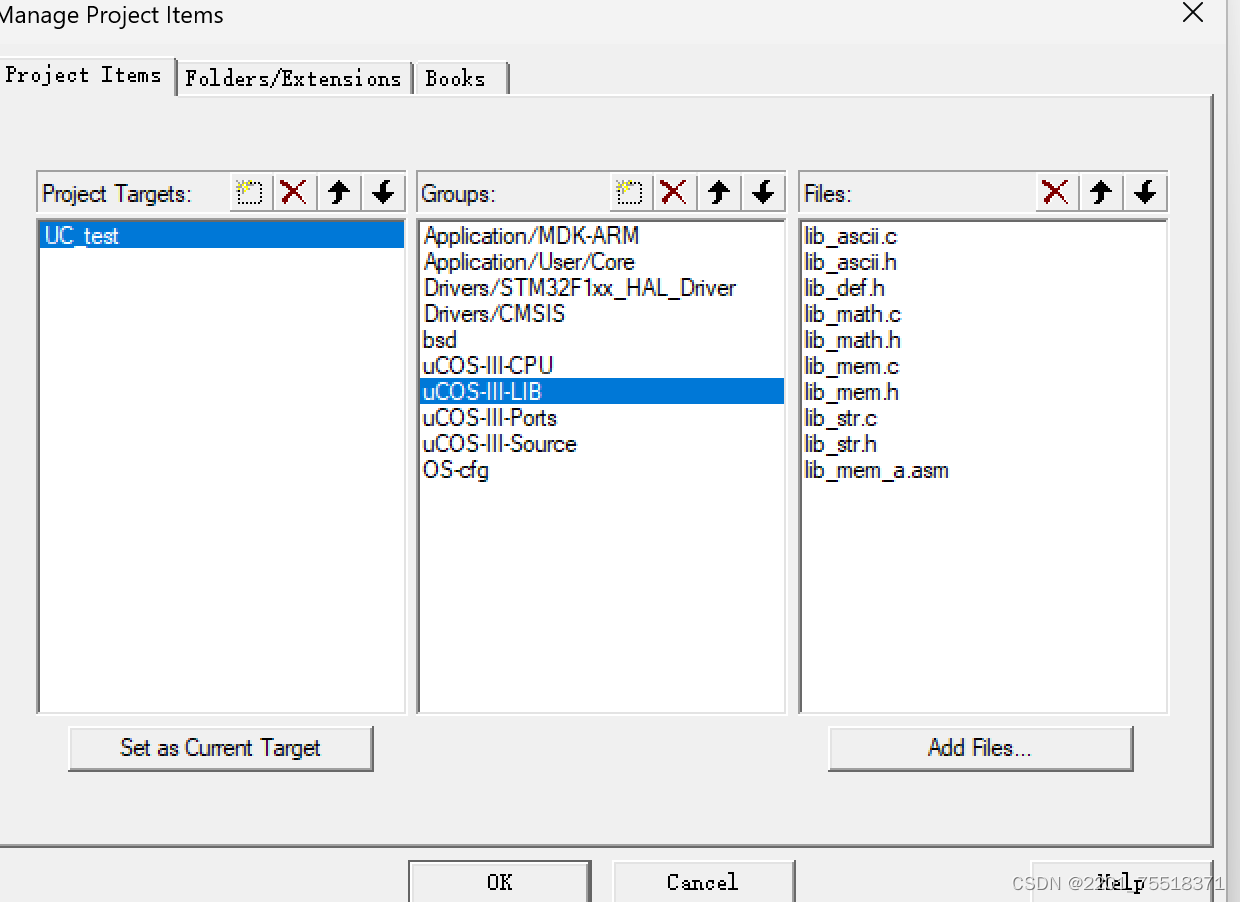
UCOSIII/uCLIB,選擇 ALL files 文件類型,將其中的九個文件添加進 uCOSIII_LIB 組;然后繼續打開: Ports/ARM-Cortex-M3/Realview, 添加 lib_mem_a.asm 文件
 ?UCOSIII/UcosIII/Ports/RAM-Cortex-M3/Generic/RealView。選擇 ALL files 文件類型, 將其中三個文件添加進 uCOSIII_Ports 組
?UCOSIII/UcosIII/Ports/RAM-Cortex-M3/Generic/RealView。選擇 ALL files 文件類型, 將其中三個文件添加進 uCOSIII_Ports 組
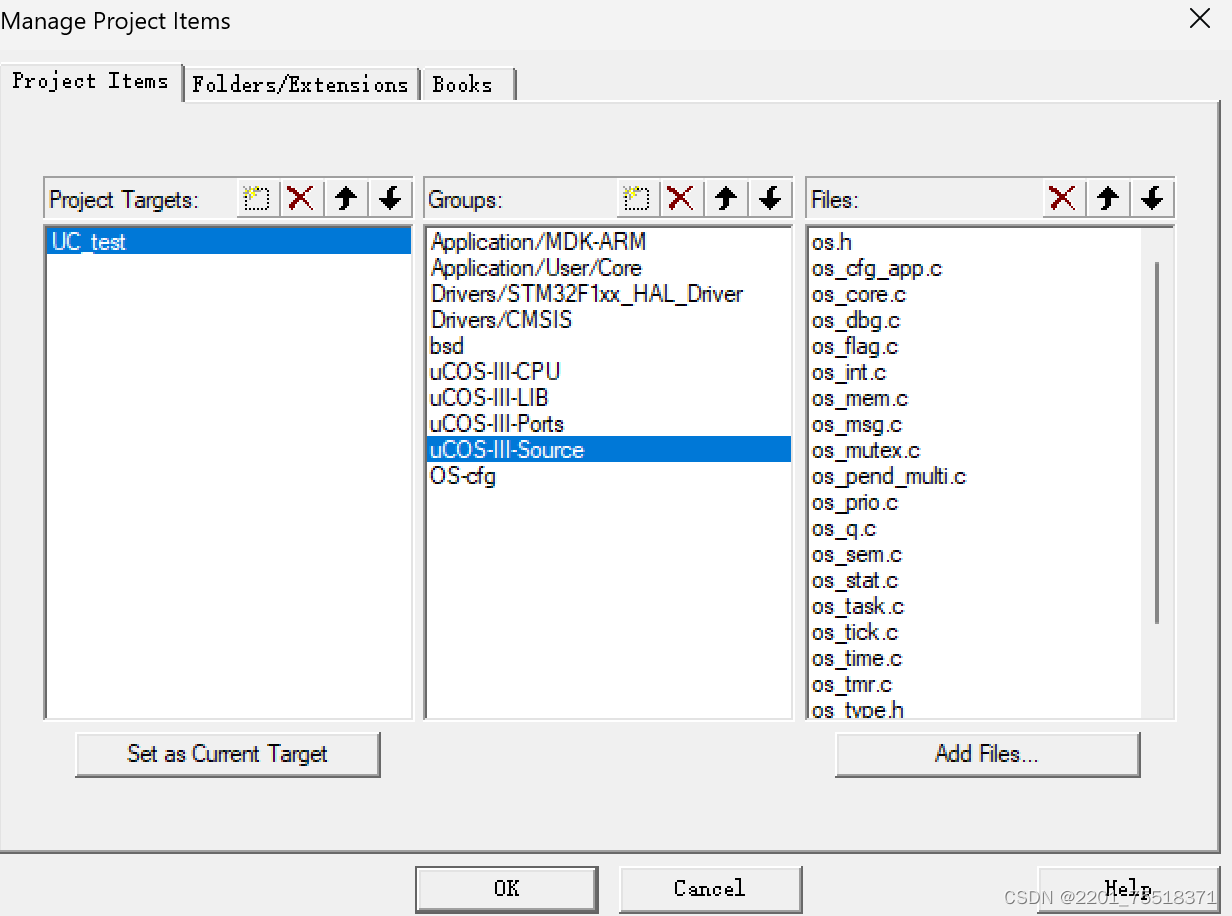
UCOSIII/UcosIII/Source。選擇 ALL files 文件類型, 將其中二十個文件添加進 uCOSIII_Sourc 組。
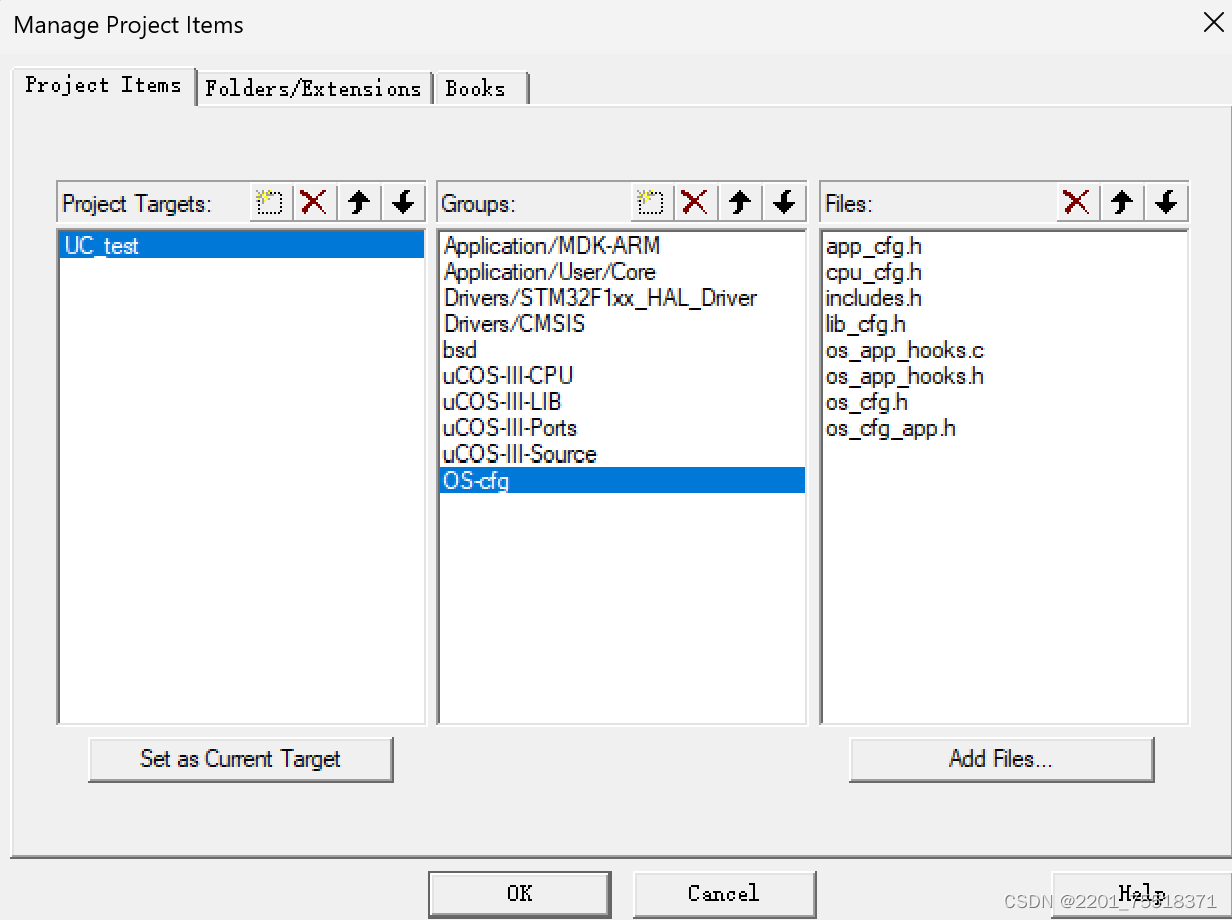
 ?Src/OS。選擇 ALLfiles 文件類型, 將圖中的八個文件添加進 OS/cfg組
?Src/OS。選擇 ALLfiles 文件類型, 將圖中的八個文件添加進 OS/cfg組
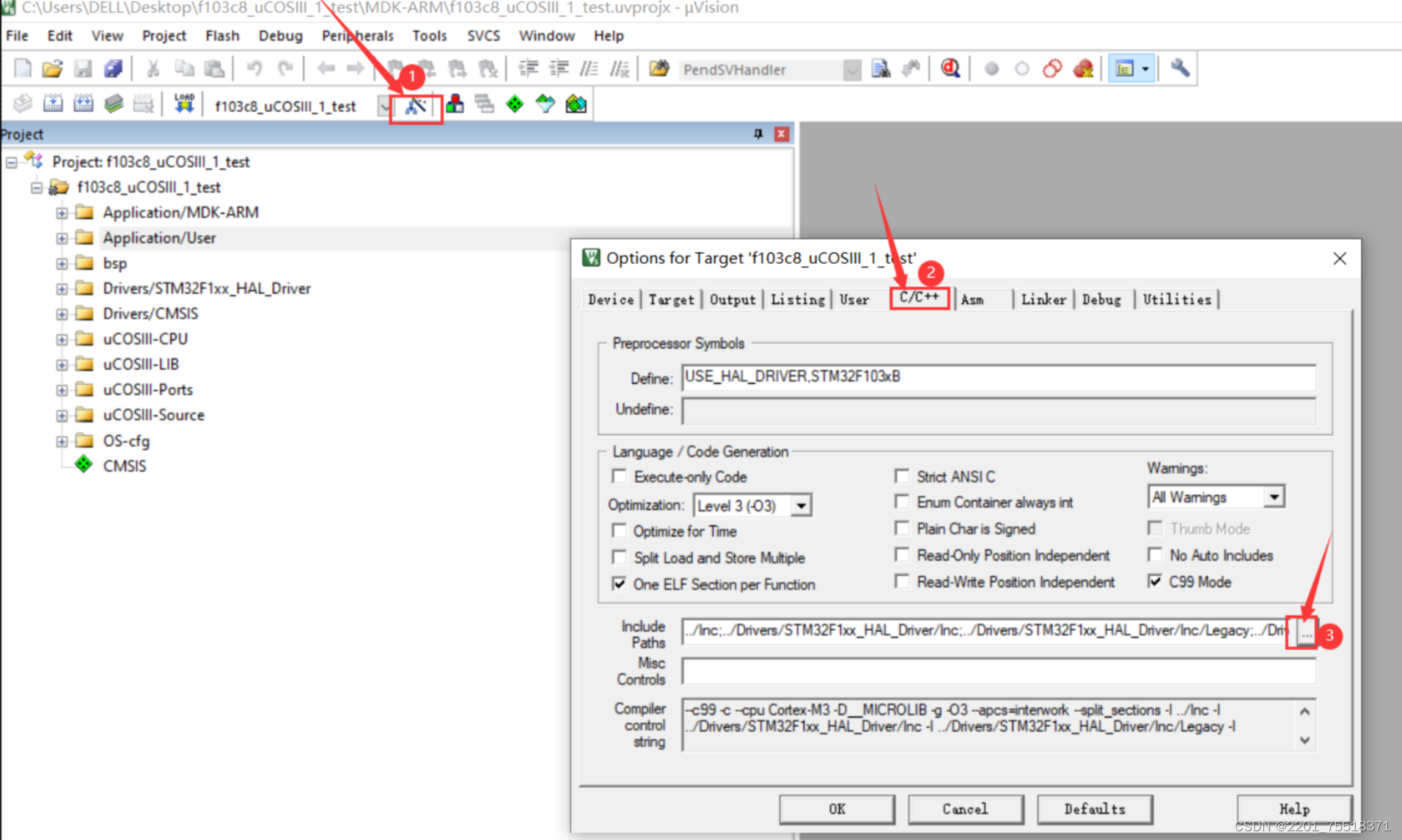
(4)添加頭文件路徑?
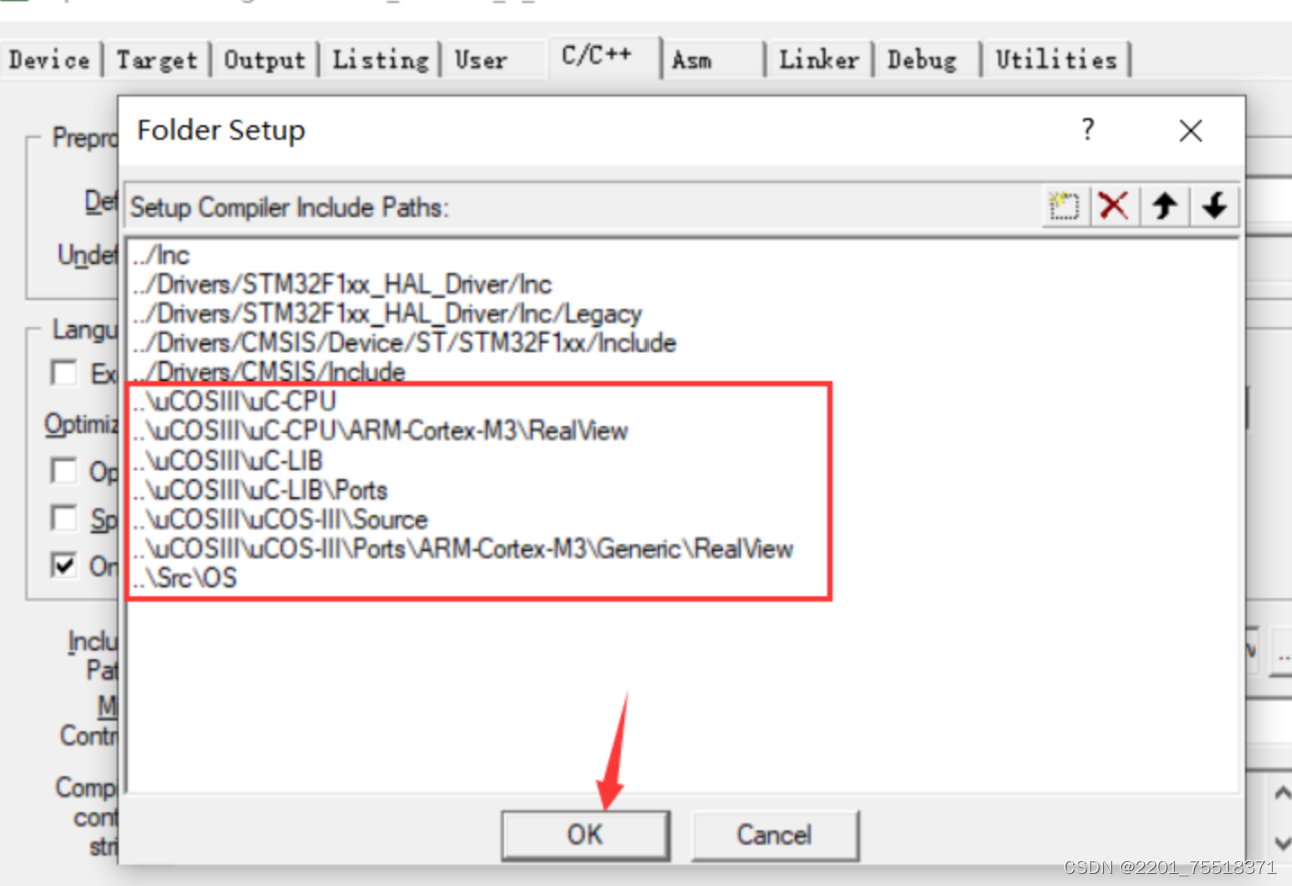 ?
?
三、修改代碼
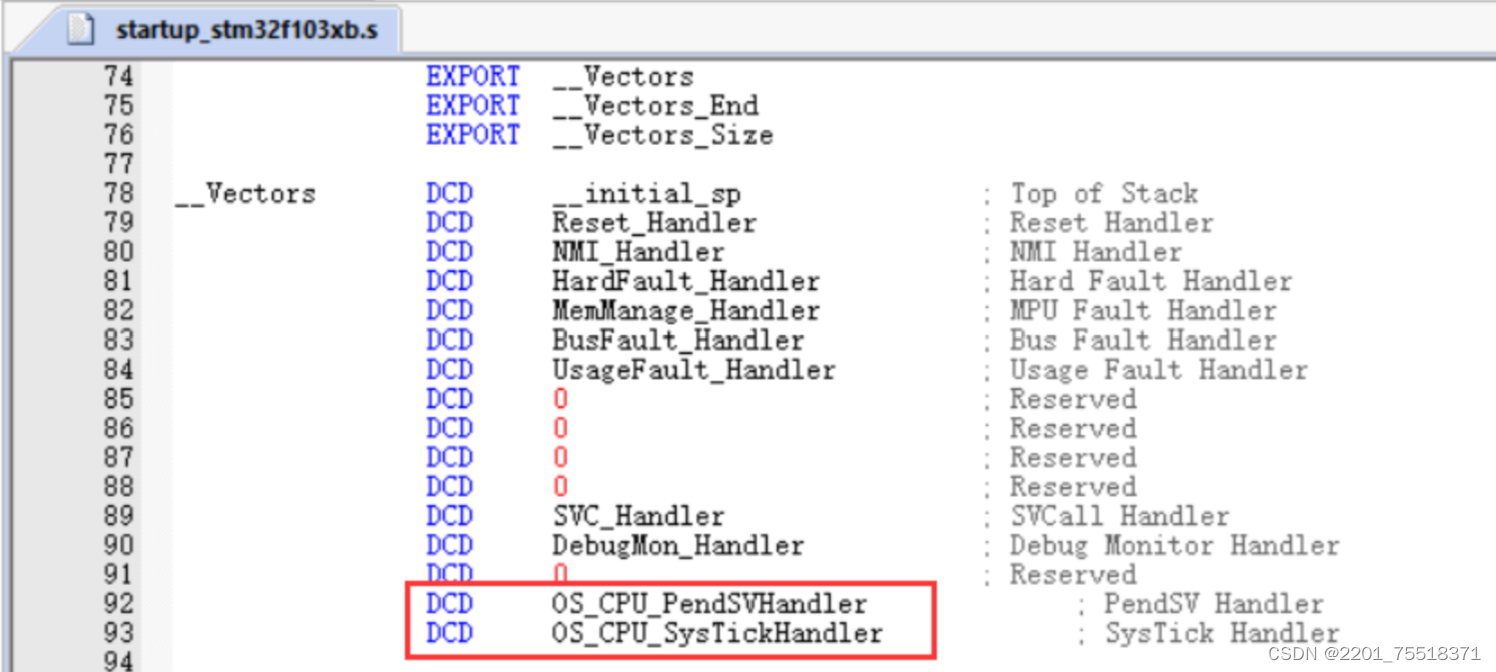
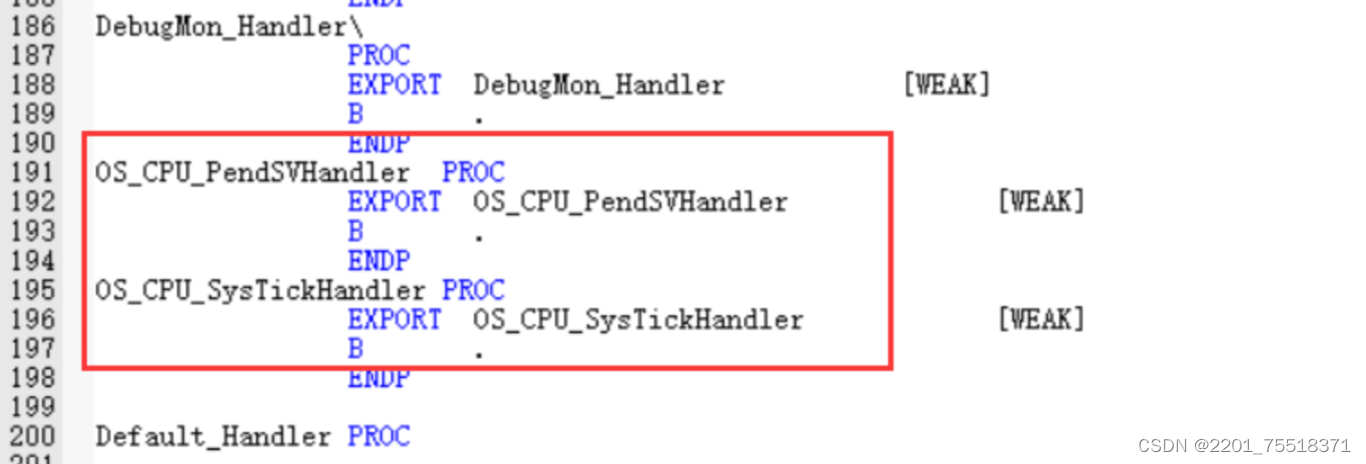
?1. 啟動文件
 ?2. app_cfg.h
?2. app_cfg.h
將#define APP_CFG_SERIAL_EN DEF_ENABLED改為
#define APP_CFG_SERIAL_EN DEF_DISABLED將#define APP_TRACE BSP_Ser_Printf改為
#define APP_TRACE (void)?3.修改includes.h文件
在#include <bsp.h>后面添加
#include “gpio.h”
#include “app_cfg.h”?將#include <stm32f10x_lib.h>?改為
#include “stm32f1xx_hal.h”?4.bsp.c?
// bsp.c
#include "includes.h"#define DWT_CR *(CPU_REG32 *)0xE0001000
#define DWT_CYCCNT *(CPU_REG32 *)0xE0001004
#define DEM_CR *(CPU_REG32 *)0xE000EDFC
#define DBGMCU_CR *(CPU_REG32 *)0xE0042004#define DEM_CR_TRCENA (1 << 24)
#define DWT_CR_CYCCNTENA (1 << 0)CPU_INT32U BSP_CPU_ClkFreq (void)
{return HAL_RCC_GetHCLKFreq();
}void BSP_Tick_Init(void)
{CPU_INT32U cpu_clk_freq;CPU_INT32U cnts;cpu_clk_freq = BSP_CPU_ClkFreq();#if(OS_VERSION>=3000u)cnts = cpu_clk_freq/(CPU_INT32U)OSCfg_TickRate_Hz;#elsecnts = cpu_clk_freq/(CPU_INT32U)OS_TICKS_PER_SEC;#endifOS_CPU_SysTickInit(cnts);
}void BSP_Init(void)
{BSP_Tick_Init();MX_GPIO_Init();
}#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
void CPU_TS_TmrInit (void)
{CPU_INT32U cpu_clk_freq_hz;DEM_CR |= (CPU_INT32U)DEM_CR_TRCENA; /* Enable Cortex-M3's DWT CYCCNT reg. */DWT_CYCCNT = (CPU_INT32U)0u;DWT_CR |= (CPU_INT32U)DWT_CR_CYCCNTENA;cpu_clk_freq_hz = BSP_CPU_ClkFreq();CPU_TS_TmrFreqSet(cpu_clk_freq_hz);
}
#endif#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
CPU_TS_TMR CPU_TS_TmrRd (void)
{return ((CPU_TS_TMR)DWT_CYCCNT);
}
#endif#if (CPU_CFG_TS_32_EN == DEF_ENABLED)
CPU_INT64U CPU_TS32_to_uSec (CPU_TS32 ts_cnts)
{CPU_INT64U ts_us;CPU_INT64U fclk_freq;fclk_freq = BSP_CPU_ClkFreq();ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);return (ts_us);
}
#endif#if (CPU_CFG_TS_64_EN == DEF_ENABLED)
CPU_INT64U CPU_TS64_to_uSec (CPU_TS64 ts_cnts)
{CPU_INT64U ts_us;CPU_INT64U fclk_freq;fclk_freq = BSP_CPU_ClkFreq();ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);return (ts_us);
}
#endif?5.bsp.h
// bsp.h
#ifndef __BSP_H__
#define __BSP_H__#include "stm32f1xx_hal.h"void BSP_Init(void);#endif
6.main.c?
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <includes.h>
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV */
//任務控制塊
static OS_TCB AppTaskStartTCB;//任務堆棧
static CPU_STK AppTaskStartStk[APP_TASK_START_STK_SIZE];/* 私有函數原形 --------------------------------------------------------------*/
static void AppTaskCreate(void);
static void AppObjCreate(void);
static void AppTaskStart(void *p_arg);
/* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/**Initializes the CPU, AHB and APB busses clocks */RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/**Initializes the CPU, AHB and APB busses clocks */RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */OS_ERR err;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */
// HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */
// SystemClock_Config();/* USER CODE BEGIN SysInit */OSInit(&err); /* USER CODE END SysInit *//* Initialize all configured peripherals */
// MX_GPIO_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE *//* 創建任務 */OSTaskCreate((OS_TCB *)&AppTaskStartTCB, /* Create the start task */(CPU_CHAR *)"App Task Start",(OS_TASK_PTR ) AppTaskStart,(void *) 0,(OS_PRIO ) APP_TASK_START_PRIO,(CPU_STK *)&AppTaskStartStk[0],(CPU_STK_SIZE) APP_TASK_START_STK_SIZE / 10,(CPU_STK_SIZE) APP_TASK_START_STK_SIZE,(OS_MSG_QTY ) 0,(OS_TICK ) 0,(void *) 0,(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),(OS_ERR *)&err);/* 啟動多任務系統,控制權交給uC/OS-III */OSStart(&err); /* Start multitasking (i.e. give control to uC/OS-III). */}/*** 函數功能: 啟動任務函數體。* 輸入參數: p_arg 是在創建該任務時傳遞的形參* 返 回 值: 無* 說 明:無*/
static void AppTaskStart (void *p_arg)
{OS_ERR err;(void)p_arg;BSP_Init(); /* Initialize BSP functions */CPU_Init();Mem_Init(); /* Initialize Memory Management Module */#if OS_CFG_STAT_TASK_EN > 0uOSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endifCPU_IntDisMeasMaxCurReset();AppTaskCreate(); /* Create Application Tasks */AppObjCreate(); /* Create Application Objects */while (DEF_TRUE){HAL_GPIO_TogglePin(LED0_GPIO_Port,LED0_Pin);HAL_GPIO_WritePin(LED1_GPIO_Port,LED1_Pin, GPIO_PIN_SET);OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/* USER CODE BEGIN 4 */
/*** 函數功能: 創建應用任務* 輸入參數: p_arg 是在創建該任務時傳遞的形參* 返 回 值: 無* 說 明:無*/
static void AppTaskCreate (void)
{}/*** 函數功能: uCOSIII內核對象創建* 輸入參數: 無* 返 回 值: 無* 說 明:無*/
static void AppObjCreate (void)
{}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state *//* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{ /* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/7.lib_cfg.h
將#define ?LIB_MEM_CFG_HEAP_SIZE ? ? ? ? ?27u * 1024ug改為
#define LIB_MEM_CFG_HEAP_SIZE 10u * 1024u
?之后就可編譯運行。
總結
移植的過程很繁瑣,需要耐心不能出錯,否則就會無法運行。
參考鏈接:
STM32F103C8T6移植uC/OS-III基于HAL庫超完整詳細過程_ostimedlyhmsm(0,0,0,800);-CSDN博客
)




)

](http://pic.xiahunao.cn/【傳知代碼】DETR[端到端目標檢測](論文復現))



_python 教程下載。】)



)


)
