操作系統定義、分類及功能+設備管理+作業管理
- 知識點
- 1-5
- 5-10
- 10-15
- 15-20
- 20-25
- 25-30
- 30-35
- 刷題
- 操作系統定義、分類及功能
- 1-5
- 5-10
- 10-15
- 作業管理
- 1-5
- 設備管理
- 1-5
- 5-10
知識點
1-5
1
嵌入式操作系統的特點:
1.微型化,從性能和成本角度考慮,希望占用的資源和系統代碼量少;
2.可定制,從減少成本和縮短研發周期考慮,要求嵌入式操作系統能運行在不同的微處理器平臺上,能針對硬件變化進行結構與功能上的配置,以滿足不同應用的需求;
3.實時性,嵌入式操作系統主要應用于過程控制、數據采集、傳輸通信、多媒體信息及關鍵要害領域需要迅速響應的場合,所以對實時性要求較高;
4.可靠性,系統構件、模塊和體系結構必須達到應有的可靠性,對關鍵要害應用還要提供容錯和防故障措施;
5.易移植性,為了提高系統的易移植性,通常采用硬件抽象層和板級支撐包的底層設計技術。
2
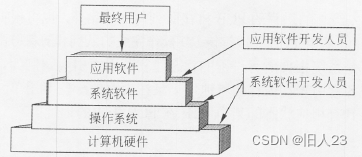
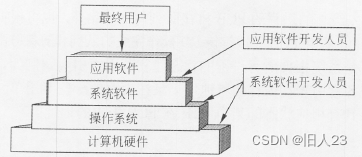
計算機系統由硬件和軟件兩部分組成。通常把未配置軟件的計算機稱為裸機。直接使用裸機不僅不方便,而且將嚴重降低工作效率和機器的利用率。操作系統(Operating System)目的是為了填補人與機器之間的鴻溝,即建立用戶與計算機之間的接口,而為裸機配置的一種系統軟件。
從圖中可見,操作系統是裸機上的第一層軟件,是對硬件系統功能的首次擴充。它在計算機系統中占據重要而特殊的地位,所有其他軟件,如編輯程序、匯編程序、編譯程序、數據庫管理系統等系統軟件,以及大量的應用軟件都是建立在操作系統基礎上的,并得到它的支持和取得它的服務。
從用戶角度看,當計算機配置了操作系統后,用戶不再直接使用計算機系統硬件,而是利用操作系統所提供的命令和服務去操縱計算機,操作系統己成為現代計算機系統中必不可少的最重要的系統軟件,因此把操作系統看作是用戶與計算機之間的接口。
3
實時是指計算機對于外來信息能夠以足夠快的速度進行處理,并在被控對象允許的時間范圍內做出快速響應。因此,實時操作系統與分時操作系統的第一點區別是交互性強弱不同,分時系統交互型強,實時系統交互性弱但可靠性要求高;第二點區別是對響應時間的敏感牲強,對隨機發生的外部事件必須在被控制對象規定的時間做出及時響應并對其進行處理;第三點區別是系統的設計目標不同,分時系統是設計成一個多用方的通用系統,交互能力強;而實時系統大都是專用系統。
4
嵌入式系統初始化過程可以分為3個主要環節,按照自底向上、從硬件到軟件的次序依次為:片級初始化、板級初始化和系統級初始化。
片級初始化完成嵌入式微處理器的初始化,包括設置嵌入式微處理器的核心寄存器和控制寄存器、嵌入式微處理器核心工作模式和嵌入式微處理器的局部總線模式等。片級初始化把嵌入式微處理器從上電時的默認狀態逐步設置成系統所要求的工作狀態。這是一個純硬件的初始化過程。
板級初始化完成嵌入式微處理器以外的其他硬件設備的初始化。另外,還需設置某些軟件的數據結構和參數,為隨后的系統級初始化和應用程序的運行建立硬件和軟件環境。這是一個同時包含軟硬件兩部分在內的初始化過程。
系統初始化過程以軟件初始化為主,主要進行操作系統的初始化。BSP將對嵌入式微處理器的控制權轉交給嵌入式操作系統,由操作系統完成余下的初始化操作,包含加載和初始化與硬件無關的設備驅動程序,建立系統內存區,加載并初始化其他系統軟件模塊,如網絡系統、文件系統等。最后,操作系統創建應用程序環境,并將控制權交給應用程序的入口。
5
操作系統有兩個重要作用:
①通過資管管理提高計算機系統的效率,操作系統是計算機系統的資源管理者,它含有對系統軟/硬件資源實施管理的一組程序。
②改善人機界面,向用戶提供友好的工作環境。
不需要語言編譯器設計的實現。
5-10
6
磁盤清理將刪除計算機上所有不需要的文件(這些文件由用戶或系統進行確認)。
磁盤碎片整理,就是通過系統軟件或者專業的磁盤碎片整理軟件對電腦磁盤在長期使用過程中產生的碎片和凌亂文件重新整理,釋放出更多的磁盤空間,可提高電腦的整體性能和運行速度。
7
匯編程序、編譯程序和數據庫管理系統軟件都屬于系統軟件。
8
因為先來先服務是誰先請求先滿足誰的請求,而最短尋找時間優先是根據當前磁臂到要請求訪問磁道的距離,誰短滿足誰的請求,故先來先服務和最短尋找時間優先算法可能會隨時改變移動臂的運動方向。
9
10
10-15
15-20
20-25
25-30
30-35
刷題
操作系統定義、分類及功能
1-5
1
嵌入式操作系統的特點:
1.微型化,從性能和成本角度考慮,希望占用的資源和系統代碼量少;
2.可定制,從減少成本和縮短研發周期考慮,要求嵌入式操作系統能運行在不同的微處理器平臺上,能針對硬件變化進行結構與功能上的配置,以滿足不同應用的需求;
3.實時性,嵌入式操作系統主要應用于過程控制、數據采集、傳輸通信、多媒體信息及關鍵要害領域需要迅速響應的場合,所以對實時性要求較高;
4.可靠性,系統構件、模塊和體系結構必須達到應有的可靠性,對關鍵要害應用還要提供容錯和防故障措施;
5.易移植性,為了提高系統的易移植性,通常采用硬件抽象層和板級支撐包的底層設計技術。
2
在 Linux 中,要更改一個文件的權限設置可使用chmod命令。
3
4
在Linux操作系統中,只有一個根目錄,根目錄使用“/”來表示。根目錄是一個非常重要的目錄,其他的文件目錄均由根目錄衍生而來。
5
實時是指計算機對于外來信息能夠以足夠快的速度進行處理,并在被控對象允許的時間范圍內做出快速響應。因此,實時操作系統與分時操作系統的第一點區別是交互性強弱不同,分時系統交互型強,實時系統交互性弱但可靠性要求高;第二點區別是對響應時間的敏感牲強,對隨機發生的外部事件必須在被控制對象規定的時間做出及時響應并對其進行處理;第三點區別是系統的設計目標不同,分時系統是設計成一個多用方的通用系統,交互能力強;而實時系統大都是專用系統。
5-10
6
嵌入式系統初始化過程可以分為3個主要環節,按照自底向上、從硬件到軟件的次序依次為:片級初始化、板級初始化和系統級初始化。
7
片級初始化完成嵌入式微處理器的初始化,包括設置嵌入式微處理器的核心寄存器和控制寄存器、嵌入式微處理器核心工作模式和嵌入式微處理器的局部總線模式等。片級初始化把嵌入式微處理器從上電時的默認狀態逐步設置成系統所要求的工作狀態。這是一個純硬件的初始化過程。
板級初始化完成嵌入式微處理器以外的其他硬件設備的初始化。另外,還需設置某些軟件的數據結構和參數,為隨后的系統級初始化和應用程序的運行建立硬件和軟件環境。這是一個同時包含軟硬件兩部分在內的初始化過程。
系統初始化過程以軟件初始化為主,主要進行操作系統的初始化。BSP將對嵌入式微處理器的控制權轉交給嵌入式操作系統,由操作系統完成余下的初始化操作,包含加載和初始化與硬件無關的設備驅動程序,建立系統內存區,加載并初始化其他系統軟件模塊,如網絡系統、文件系統等。最后,操作系統創建應用程序環境,并將控制權交給應用程序的入口。
8
操作系統有兩個重要作用:
①通過資管管理提高計算機系統的效率,操作系統是計算機系統的資源管理者,它含有對系統軟/硬件資源實施管理的一組程序。
②改善人機界面,向用戶提供友好的工作環境。
不需要語言編譯器設計的實現。
9
磁盤格式化是指把一張空白的盤劃分成一個個小區域并編號,以供計算機儲存和讀取數據。格式化是一種純物理操作,是在磁盤的所有數據區上寫零的操作過程,同時對硬盤介質做一致性檢測,并且標記出不可讀和壞的扇區。由于大部分硬盤在出廠時已經格式化過,所以只有在硬盤介質產生錯誤時才需要進行格式化。
磁盤分區就是將磁盤劃分成一塊塊的存儲區域。在傳統的磁盤管理中,將一個硬盤分為兩大類分區:主分區和擴展分區。主分區是能夠安裝操作系統、能夠進行計算機啟動的分區,這樣的分區可以直接格式化,然后安裝系統,直接存放文件。
磁盤里的文件都是按存儲時間先后來排列的,理論上文件之間都是緊湊排列而沒有空隙的。但是,用戶常常會對文件進行修改,而且新增加的內容并不是直接加到原文件的位置的,而是放在磁盤存儲空間的最末尾,系統會在這兩段之間加上聯系標識。當有多個文件被修改后,磁盤里就會有很多不連續的文件。一旦文件被刪除,所占用的不連 續空間就會空著,并不會被自動填滿,而且,新保存的文件也不會放在這些地方,這些 空著的磁盤空間,就被稱作“磁盤碎片”。因此,硬盤的每個分區里都會有碎片。碎片太多,其他的不連續文件相應也多,系統在執行文件操作時就會因反復尋找聯系標識,工作效率大大降低,直接的反映就是感覺慢。
磁盤清理將刪除計算機上所有不需要的文件(這些文件由用戶或系統進行確認)。
磁盤碎片整理,就是通過系統軟件或者專業的磁盤碎片整理軟件對電腦磁盤在長期使用過程中產生的碎片和凌亂文件重新整理,釋放出更多的磁盤空間,可提高電腦的整體性能和運行速度。
10
財務軟件、汽車防盜程序、辦公管理軟件和氣象預報軟件都屬于應用軟件,而選項A、C和D中含有這些軟件。選項B中匯編程序、編譯程序和數據庫管理系統軟件都屬于系統軟件。
10-15
11
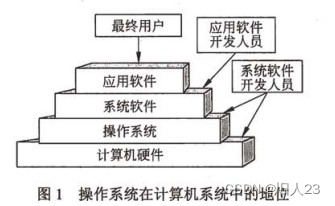
計算機系統由硬件和軟件兩部分組成。通常把未配置軟件的計算機稱為裸機,直接使用裸機不僅不方便,而且將嚴重降低工作效率和機器的利用率。操作系統(Operating System)的目的是為了填補人與機器之間的鴻溝,即建立用戶與計算機之間的接口而為裸機配置的一種系統軟件。由圖1可以看出,操作系統是裸機上的窠一層軟件,是對硬件系統功能的首次擴充。它在計算機系統中占據重要而特殊的地位,所有其他軟件,如編輯程序、匯編程序、編譯程序和數據庫管理系統等系統軟件,以及大量的應用軟件都是建立在操作系統基礎上的,并得到它的支持和取得它的服務。從用戶角度看,當計算機配置了操作系統后,用戶不再直接使用計算機系統硬件,而是利用操作系統所提供的命令和服務去操縱計算機,操作系統已成為現代計算機系統中必不可少的最重要的系統軟件,因此把操作系統看作是用戶與計算機之間的接口。因此,操作系統緊貼系統硬件之上,所有其他軟件之下(是其他軟件的共同環境)。
12
因為Windows XP操作系統支持FAT、FAT32或NTFS文件系統,所以利用“磁盤管理”程序可以對磁盤進行初始化、創建卷,并可以選擇使用FAT、FAT32或NTFS文件系統格式化卷。
13
文件級安全管理,是通過系統管理員或文件主對文件屬性的設置來控制用戶對文件的訪問。通常可設置以下幾種屬性:
?只執行:只允許用戶執行該文件,主要針對.exe和.com文件。
?隱含:指示該文件為隱含屬性文件。
?索引:指示該文件是索引文件。
?修改:指示該文件自上次備份后是否還被修改。
?只讀:只允許用戶讀該文件。
?讀/寫:允許用戶對文件進行讀和寫。
?共享:指示該文件是可讀共享的文件。
?系統:指示該文件是系統文件。
用戶對文件的訪問,將由用戶訪問權、目錄訪問權限及文件屬性三者的權限所確定。 或者說是有效權限和文件屬性的交集。例如對于只讀文件,盡管用戶的有效權限是讀/ 寫,但都不能對只讀文件進行修改、更名和刪除。對于一個非共享文件,將禁止在同一時間內由多個用戶對它們進行訪問。通過上述四級文件保護措施,可有效地保護文件。 因此將“C:\Windows\myprogram.exe”文件設置成只讀和隱藏屬性,以便控制用戶對該文件的訪問,這一級安全管理稱之為文件級安全管理。
14
最短移臂調度算法,即優先響應距離較近磁道的申請。
1、當前磁頭位于15號柱面(柱面號即磁道編號),請求序列分別位于12號柱面(①⑤)、19號柱面(②④)、23號柱面(③)、28號柱面(⑥);
2、距離15號柱面最近的應該是12號柱面(①⑤),優先響應(①⑤),次序不限;
3、此時磁頭位于12號柱面,距離最近的應該是19號柱面(②④),次序不限;
4、此時磁頭位于19號柱面,距離最近的應該是23號柱面(③);
5、此時磁頭位于23號柱面,距離最近的應該是28號柱面(⑥)。
15
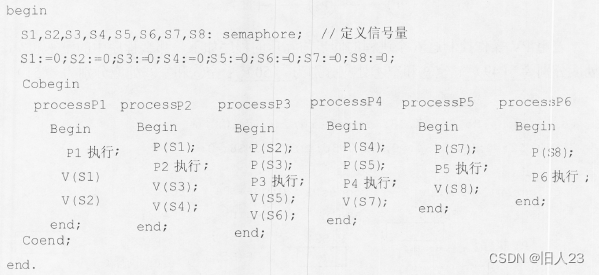
根據前趨圖P1進程運行完需要利用V操作分別通知P2、P3進程,所以空①應填V (S1) V (S2)。P2進程需要等待P1進程的通知,故需要利用P (S1)操作測試P1進程是否運行完,由于P3進程執行前已經用P(S2),所以P2進程的空②應填P (S1)。
16
根據前趨圖P3進程需要等待P1和P2進程的通知,需要執行2個P操作,而P3進程的程序中執行前只有1個P操作,故空③應為1 個P操作。P3進程運行結束需要利用1個V操作通知P5進程,故空④應為1個V操作。
17
根據前趨圖P4進程執行完需要通知P6進程,故P4進程應該執行V(S7),即空⑤應填V(S7)。P6進程運行前需要等待P4和P5進程的通知,需要執行2個P操作,故空⑥應填寫P(S7)和P (S8)。
根據上述分析,用PV操作控制這6個進程的同步與互斥的程序如下:
作業管理
1-5
1
前趨圖是一個有向無環圖,由節點和有向邊組成,節點代表各程序段的操作,而節點間的有向邊表示兩個程序段操作之間存在的前趨關系(“→”)。程序段Pi和Jj的前趨關系可表示成Pi→Pj,其中Pi是Pj的前趨,Pj是Pi的后繼,其含義是Pi執行結束后Pj才能執行。本題完整的前趨圖如下圖所示,具體分析如下。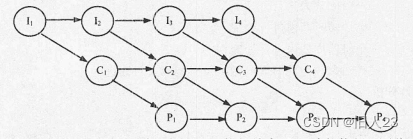
2
根據題意,I1執行結束后C1才能執行,P1執行結束后P2才能執行,因此I1是C1的前趨,P1是P2的前趨。可見,①、②分別為C1、P2。
根據題意,I2執行結束后I3才能執行,即I2是I3前趨,所以③應為I3。又因為計算機系統中只有一個CPU和一臺輸出設備,所以C3執行結束后C4才能執行,C3是C4的前趨;P3執行結束后P4才能執行,P3是P4的前趨。經分析可知圖中③、④、⑤。
3
前趨圖是一個有向無循環圖,由節點和有向邊組成,節點代表各程序段的操作,而節點間的有向邊表示兩個程序段操作之間存在的前趨關系(“―>”)。程序段Pi和Pj的前 趨關系可表示成Pi—Pj,其中Pi是Pj的前趨,Pj是Pi的后繼,其含義是Pi執行結束后 Pj才能執行。本題完整的前趨圖如下圖所示。
根據題意,I1執行結束后C1才能執行,C1執行結束后P1才能執行,因此I1是C1、 P1,的前趨,(C1是P1,的前趨。可見,圖中③應為C1。又因為計算機系統中只有一臺輸入設備,所以I1執行結束后I2和I3才能執行,故I1是I2和I3的前趨,I2是I3的前趨。可見,圖中①、②分別為I2、I3。
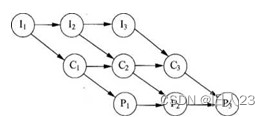
綜上分析③應為C1,所以C1是P1的前趨,又因為計算機中只有一個CPU,而且采用優先級調動,所以C1是C2的前趨,所以C2是④。
由于計算機中只有一臺輸出設備,所以P1,執行結束后P2才能執行,所以P1是P2的前趨,P2執行結束后P3才能執行,P2是P3的前趨,所以,⑤、⑥分別為P2和P3。
4
經上分析③應為C1,所以C1是P1的前驅。又因為計算機系統中只有一個CPU,而且系統采用優先級調度,所以C1是C2的前趨,C2是C3的前趨。可見,圖中④應為C2。
5
因為計算機系統中只有一臺輸出設備,所以P1執行結束后P2才能執行,故P1是P2的前趨;p2執行結束后p3才能執行,p2是p3的前趨。可見,圖中⑤、⑥分別為p2、P3
設備管理
1-5
1
具體層次從上往下分別為
用戶級I/O層、
設備無關I/O層、
設備驅動程序、
中斷處理程序、
硬件。
硬件:完成具體的I/O操作。
中斷處理程序:I/O完成后喚醒設備驅動程序。
設備驅動程序:設置寄存器,檢查設備狀態。
設備無關I/O層:設備名解析、阻塞進程、分配緩沖區。
用戶級I/O層:發出I/O調用。
2
程序查詢和中斷方式都需要CPU來執行程序指令進行數據的輸入和輸出,DMA方式則不同,這是一種不經過CPU而直接從內存存取數據的數據交換模式。
程序查詢方式是由CPU主動查詢外設的狀態,在外設準備好時傳輸數據。
中斷方式是在外設準備好時給CPU發中斷信號,之后再進行數據傳輸。在外設未發中斷信號之前,CPU可以執行其他任務。
在DMA模式下,CPU只需向DMA控制器下達指令,讓DMA控制器來處理數據的傳送,數據傳送完畢再把信息反饋給CPU即可。
3
訪問一個數據塊的時間應為尋道時間加旋轉延遲時間及傳輸時間之和。根據題意,每塊的旋轉延遲時間及傳輸時間共需120ms,磁頭從一個磁道移至另一個磁道需要6ms,但邏輯上相鄰數據塊的平均距離為10個磁道,即讀完一個數據塊到下一個數據塊尋道時間需要60ms。通過上述分析,本題訪問一個數據塊的時間T=120ms+60ms=180ms,而讀取一個100塊的文件共需要18000ms。
4
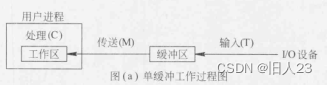
D在塊設備輸入時,假定從磁盤把一塊數據輸入到緩沖區的時間為T,緩沖區中的數據傳送到用戶工作區的時間為M,而系統處理(計算)的時間為C,如圖(a)所示。
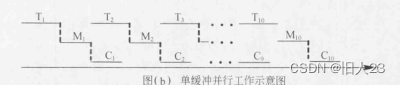
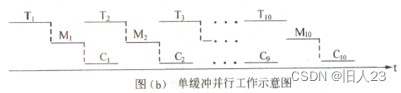
當第一塊數據送入用戶工作區后,緩沖區是空閑的就可以傳送第二塊數據。這樣第一塊數據的處理C1與第二塊數據的輸入T2是可以并行的,依次類推,如圖(b)所示。系統對每一塊數據的處理時間為:Max(C,T)+M。因為,當T>C時,處理時間為M+T;當T<C時,處理時間為M+C。本題每一塊數據的處理時間為15+5=20,Docl文件的處理時間為20*10+1。
5
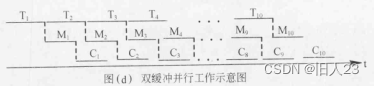
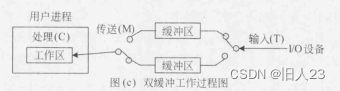
雙緩沖工作方式基本方法是在設備輸入時,先將數據輸入到緩沖區1,裝滿后便轉向緩沖區2。此時系統可以從緩沖區1中提取數據傳送到用戶區,最后由系統對數據進行處理,如圖(c)所示。
雙緩沖可以實現對緩沖區中數據的輸入T和提取M,與CPU的計算C,三者并行工作,如圖(d)所示。從圖中可以看出,雙緩沖進一步加快了I/O的速度,提高了設備的利用率。在雙緩沖時,系統處理一塊數據的時間可以粗略地認為是Max(C,T)。如果C<T,可使塊設備連續輸入;如果C>T,則可使系統不必等待設備輸入。本題每一塊數據的處理時間為15,釆用雙緩沖需要花費的時間為15*10+5+1=156。
5-10
6
C在塊設備輸入時,假定從磁盤把一塊數據輸入到緩沖區的時間為T,緩沖區中的數據傳送到用戶工作區的時間為M,而系統處理(計算)的時間為C,如圖(a)所示。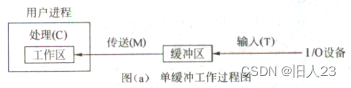
當第一塊數據送入用戶工作區后,緩沖區是空閑的,可以傳送第二塊數據。這樣第一塊數據的處理C1與第二塊數據的輸入T2是可以并行的,如圖(b)所示,依次類推。系統對毎一塊數據的處理時間為:Max(C,T)+M。因為當T>C時,處理時間為本題每一塊數據的處理時間為10+5=15,Doc1文件的處理時間為15*10+2=152。
7
雙緩沖工作方式基本方法是在設備輸入時,先將數據輸入到緩沖區1,裝滿后便轉向緩沖區2。此時系統可以從緩沖區1中提取數據傳送到用戶區,最后由系統對數據進行處理,如圖(c)所示。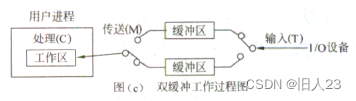
雙緩沖可以實現對緩沖區中數據的輸入T和提取M,與CPU的計算C,三者并行工作,如圖(c)所示。從圖中可以看出,雙緩沖進一步加快了I/O的速度,提高了設備的利用率。在雙緩沖時,系統處理一塊數據的時間可以粗略地認為是Max(C,T)。如果C<T,可使塊設備連續輸入;如果C>T,則可使系統不必等待設備輸入。本題每一塊數據的處理時間為10,采用雙緩沖需要花費的時間為10*10+5+2=107。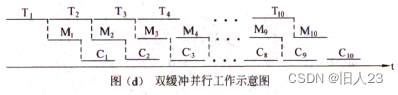
8
A當進程請求讀磁盤時,操作系統先進行移臂調度,再進行旋轉調度。由于系統剛完成了 10號柱面的操作,當前移動臂在13號柱面上,若系統采用SCAN (掃描)調度算法,則系統響應柱面序列為15→20→30→8→6→5→2。
按照旋轉調度的原則進程在15號柱面上的響應序列為⑦→⑩→①,因為進程訪問的是不同磁道上的不同編號的扇區,旋轉調度總是讓首先到達讀寫磁頭位置下的扇區先進行傳送操作。進程在20號柱面上的響應序列為②→④,或④→②。對于②和④可以任選一個進行讀寫,因為進程訪問的是不同磁道上具有相同編號的扇區,旋轉調度可以任選一個讀寫磁頭位置下的扇區進行傳送操作。
從上分析可以得出按照SCAN (掃描)調度算法的響應序列為⑦⑩①②④③⑨⑧⑤⑥。
9
若系統采用CSCAN (單向掃描)調度算法,在返程時是不響應用戶請求的,因此系統的柱面響應序列為15→20→30→2→5→6→8。
可見,按照CSCAN (單向掃描)調度算法的響應序列為⑦⑩①②④③⑥⑤⑧⑨。
10
D訪問一個數據塊的時間應為尋道時間加旋轉延遲時間及傳輸時間。根據題意,每塊的旋轉延遲時間及傳輸時間共需102ms,磁頭從一個磁道移至另一個磁道需要10ms,但邏輯上相鄰數據塊的平均距離為10個磁道,即讀完一個數據塊到下一個數據塊尋道時間需要100ms。通過上述分析,本題訪問一個數據塊的時間應為202ms,而讀取一個100塊的文件共需要20200ms。
11
C因為系統使用的是單緩沖區,且順序處理9個記錄,每個記錄處理時間為3ms,加上讀寫時間,總的時間就超過3ms了。而磁盤旋轉一圈的時間為27ms,也就是說,當系統讀取第0個記錄后,正在處理的過程中,磁盤已經旋過了第1個記錄。那么,要讀取第1個記錄,就需要磁盤再次旋轉到第1個記錄(即磁盤旋轉1圈后,27+3=30ms)。同理,要讀取第2個記錄時,也需要等30ms。這樣,要讀取后面8個記錄,需要8×30=240ms,同時加上處理第0個記錄的時間(3ms)和處理第8個記錄的時間(3ms),共需246ms。

12
B對于第二種情況,若對信息進行分布優化的結果如下所示:
從上表可以看出,當讀出記錄R1并處理結束后,磁頭剛好轉至R2記錄的開始處,立即就可以讀出并處理,因此處理9個記錄的總時間為:
9X (3ms (讀記錄)+3ms (處理記錄))=9X6ms=54ms
13
因為先來先服務是誰先請求先滿足誰的請求,而最短尋找時間優先是根據當前磁臂到要請求訪問磁道的距離,誰短滿足誰的請求,故先來先服務和最短尋找時間優先算法可能會隨時改變移動臂的運動方向。
)


















