歡迎入群共同學習交流
時間記錄:2024/5/23
一、模塊介紹
(1)引腳介紹
VCC:電源引腳,接單片機3.3/5V
GND:電源地
Trig:超聲信號觸發引腳
Echo:超聲信號接收引腳
(2)時序圖
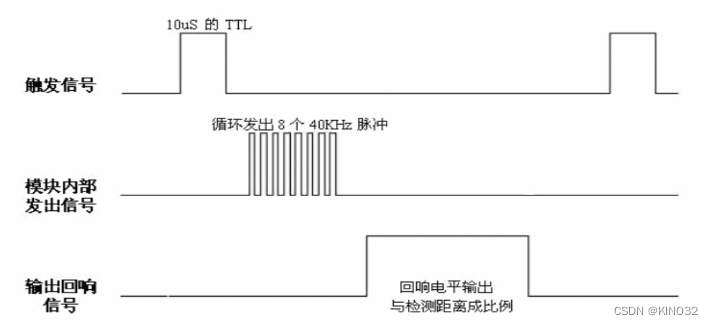
介紹:通過Trig觸發引腳設置一個大于10us的TTL高電平,觸發內部循環發送8個40KHZ的超聲波,然后通過接收引腳判斷接收信號高電平的持續時間,通過聲速進行計算來回的距離,如果超過38ms仍未接收到回波也會觸發高電平,此時電平持續時間最長
二、示例代碼
(1)頭文件
#ifndef __HCSR04_H__
#define __HCSR04_H__
#include "stm32f10x.h"/**HC-SR04超聲模塊初始化*/
void Hcsr04_Init(void);
/**獲取距離,單位CM*/
void vGetDistance(float *dis,float temp);#endif(2)源文件
#include "hc_sr04.h"
#include "delay.h"//端口宏定義
#define Tring_GPIO GPIOB
#define Tring_PIN GPIO_Pin_5
#define Echo_GPIO GPIOB
#define Echo_PIN GPIO_Pin_6void Hcsr04_Init(void)
{//使能時鐘RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);/**初始化GPIO端口*/GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Pin = Tring_PIN;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(Tring_GPIO,&GPIO_InitStruct);GPIO_InitStruct.GPIO_Pin = Echo_PIN;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPD;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(Echo_GPIO,&GPIO_InitStruct);/**初始化TIM2,進行計時*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStruct.TIM_Period=0xFFFF;TIM_TimeBaseInitStruct.TIM_Prescaler=72-1; //1us計數一次TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);TIM_Cmd(TIM2,ENABLE);//使能/開啟定時器
}void vGetDistance(float *dis,float temp)
{u16 time = 0;/**Tring引腳拉高10us的TTL電平,使模塊發送超聲波*/GPIO_SetBits(Tring_GPIO,Tring_PIN);vDelayUs(10);GPIO_ResetBits(Tring_GPIO,Tring_PIN);/*獲取回波時間,高電平持續時間38ms為無回波時返回時間*/while(GPIO_ReadInputDataBit(Echo_GPIO,Echo_PIN) == 0);TIM_SetCounter(TIM2,0);while(GPIO_ReadInputDataBit(Echo_GPIO,Echo_PIN) == 1);time = TIM_GetCounter(TIM2);//計算距離*dis = time*(334.1+0.6*temp) / 20000;vDelayMs(5); //等待下一次開始,官方建議60ms采樣周期,自己根據情況修改
}


使用方式)


)
![npm install [Error]](http://pic.xiahunao.cn/npm install [Error])


)





)


