下載git工程
git clone https://github.com/RealManRobot/rm_robot.git
安裝配置
catkin build rm_msgs
source devel/setup.bash
catkin build
source setup.bash
這里注意,如果采用setup.sh多半不會成功,必須要source setup.bash文件,ros才能檢索到相關ros包。
啟動
#鏈接同一wifi
#睿爾曼機械臂默認IP是192.168.1.18
#鏈接成功時,ros log會有connection success類提示
roslaunch rm_control rm_65_control.launch &
roslaunch rm_bringup rm_65_robot.launch#rviz控制
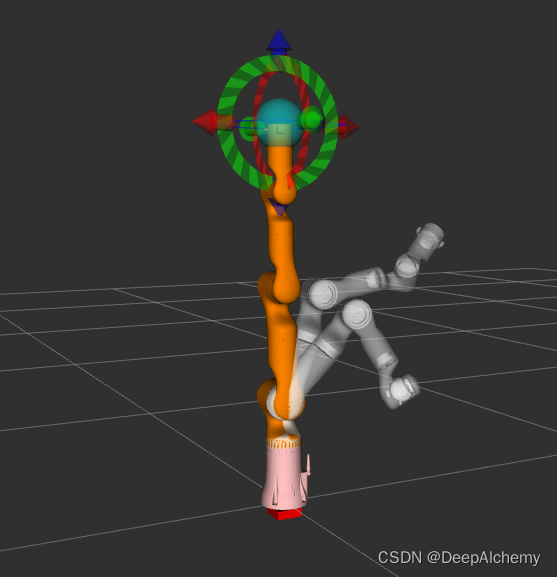
啟動界面右側是機械臂實時姿態,左下角是控制面板。

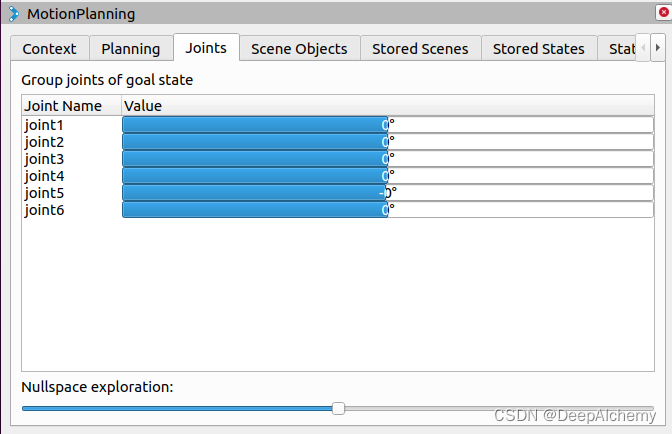
切換到joints選項卡,手動設置各個關節歸位。
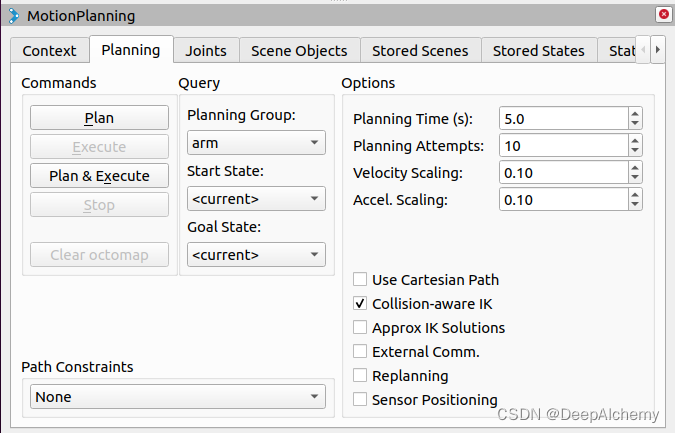
切換planning選項卡,點擊Plan & Execute移動機械臂,此時機械臂會自行規劃路線,并移動到之前指定的位姿。






)












