文章目錄
- 前言
- 一、高斯混合模型介紹
- 1.高斯模型舉例
- 1)定義
- 2)舉例說明
- 2.高斯混合模型(GMM)
- 1)定義
- 2)舉例說明
- 3)一維曲線
- 二、VAD高斯混合模型
- 1.模型訓練介紹
- 1)訓練方法
- 2)訓練結果
- 2.噪聲高斯模型分布
- 1)matlab代碼
- 2)結果
- 2.人聲高斯模型分布
- 三、VAD人聲判斷
- 1.高斯分布計算
- 1)公式
- 2)對應代碼
- 2.人聲判定策略
- 1)判斷機制
- 2)重要閾值確認
- 3)整體流程
- 第一步:計算噪聲/人聲概率分布
- 第二步:噪聲/人聲比較
- 第三步:判斷單個閾值
- 第四步:全局判定
- 四、模型更新
- 1.計算條件概率
- 2.獲取噪聲基線和均值
- 1)噪聲基線的作用
- 2)確定噪聲基線
- 3)獲取噪聲均值
- 3.更新噪聲均值
- 1)短時更新
- 2)平滑修正
- 3)邊界約束
- 4)策略意義
- 4.更新人聲均值
- 5.更新人聲方差
- 1)更新公式
- 2)代碼解析
- 3)邊界約束
- 6.更新噪聲方差
- 7.模型分離
- 1)計算全局均值
- 2)計算差值
- 3)如果模型太近,強行拉開
- 4)限制模型漂移范圍
- 五、hangover 機制
- 1.策略作用
- 2.整體流程
- 3.對應代碼
- 1)非語音處理
- 2)語音
- 總結
前言
在上一篇文章中,介紹了VAD對于能量的計算原理和策略介紹。本篇文章中講進一步介紹VAD中的人聲/噪聲決策,這是基于高斯混合模型,也就是GMM進行計算的。
本篇文章將會對照源碼、結合圖像進行介紹:
- GMM模型介紹(可以跳過)
- webrtc中VAD的高斯模型(包括來源以及使用)
- 人聲/噪聲決策以及在線更新機制
- hangover機制
本篇文章比較長,可以耐心觀看。
|版本聲明:山河君,未經博主允許,禁止轉載
一、高斯混合模型介紹
如果對于高斯模型很熟悉那么可以跳過這一節,這里需要明白的是概率密度、區間概率和條件概率的區別。
1.高斯模型舉例
1)定義
高斯分布(又叫正態分布)是一種常見的概率分布,它的概率密度也叫做似然函數(PDF)是:
p(x)=12πσ2exp?(?(x?μ)22σ2)p(x)=\frac{1}{\sqrt{2\pi\sigma^2}}\exp\Big(-\frac{(x-\mu)^2}{2\sigma^2}\Big)p(x)=2πσ2?1?exp(?2σ2(x?μ)2?)
- μ\muμ為均值:分布的中心位置,數據大部分集中在它附近。
- σ2\sigma^2σ2表示方差:分布的寬度,數值越大,圖像分布越平;數值越小,分布越尖。
而使用高斯分布計算區間概率公式為:
P(a<X<b)=∫abp(x)dxP(a<X<b)=\int_a^bp(x)dxP(a<X<b)=∫ab?p(x)dx
2)舉例說明
假設有一門數學考試,100 分滿分,有5個學生的成績分別是60,70,80,75,6560,70,80,75,6560,70,80,75,65:
- 均值μ\muμ:μ=1N∑i=1Nxi=60+70+80+75+655=70\mu=\frac{1}{N}\sum_{i=1}^{N}x_i = \frac{60+70+80+75+65}{5}=70μ=N1?∑i=1N?xi?=560+70+80+75+65?=70
- 方差σ2=1N∑i=1N(xi?μ)2=(?10)2+02+102+52+(?5)25=50\sigma^2=\frac{1}{N}\sum_{i=1}^{N}(x_i-\mu)^2=\frac{(-10)^2+0^2+10^2+5^2+(-5)^2}{5}=50σ2=N1?∑i=1N?(xi??μ)2=5(?10)2+02+102+52+(?5)2?=50
那么現在還有一個學生
- 他的成績為737373分的概率帶入公式最終結果為:5.16%5.16\%5.16%
- 他的成績在[70,75][70,75][70,75]分之間的概率帶入公式為:26%26\%26%
2.高斯混合模型(GMM)
1)定義
GMM 就是多個高斯分布的加權和,它的概率密度公式是:
p(x)=∑k=1Kwk?N(x∣uk,σk2)p(x)=\sum_{k=1}^{K}w_k \cdot \Nu(x|u_k,\sigma_k^2)p(x)=k=1∑K?wk??N(x∣uk?,σk2?)
- kkk:高斯分布的個數
- wkw_kwk?:每個分布的權重(比例,所有權重相加 = 1)
- uk,σku_k,\sigma_kuk?,σk?:第k 個高斯分布的均值和方差
- N(x∣uk,σk2)\Nu(x|u_k,\sigma_k^2)N(x∣uk?,σk2?):第k個高斯分布的概率密度函數 (PDF)
而此時我們計算某一個值屬于哪一個高斯分布的過程叫做條件概率(責任度):
P(lk∣x)=lkp(x)=wk?N(x∣uk,σk2)p(x)P(l_k|x)=\frac{l_k}{p(x)}=\frac{w_k \cdot \Nu(x|u_k,\sigma_k^2)}{p(x)}P(lk?∣x)=p(x)lk??=p(x)wk??N(x∣uk?,σk2?)?
2)舉例說明
上文中是一個以成績的例子進行計算高斯分布,但顯然現實中要考慮的因素會更多:
- 一部分學生是學霸30%30\%30%,集中在85±585 \pm 585±5分附近
- 一部分學生是普通學生70%70\%70%,集中在65±1065\pm 1065±10分附近
那么由此可以得到:
- 學霸群體:均值u1=85u_1 = 85u1?=85,標準差σ1=5\sigma_1= 5σ1?=5,權重w1=0.3w_1= 0.3w1?=0.3
- 普通學生:均值u2=65u_2 = 65u2?=65,標準差σ2=10\sigma_2= 10σ2?=10,權重w2=0.7w_2= 0.7w2?=0.7
此時有一個學生成績為70,那么他的條件概率分別為:
- P(l1∣x)=l1p(x)≈0.01067(1.07%)P(l_1|x)=\frac{l_1}{p(x)} \approx 0.01067(1.07\%)P(l1?∣x)=p(x)l1??≈0.01067(1.07%)
- P(l2∣x)=l2p(x)=1?P(l1∣x)≈0.98933(98.93%)P(l_2|x)=\frac{l_2}{p(x)} = 1- P(l_1|x) \approx 0.98933 (98.93\%)P(l2?∣x)=p(x)l2??=1?P(l1?∣x)≈0.98933(98.93%)
很明顯,該學生大概率屬于普通學生
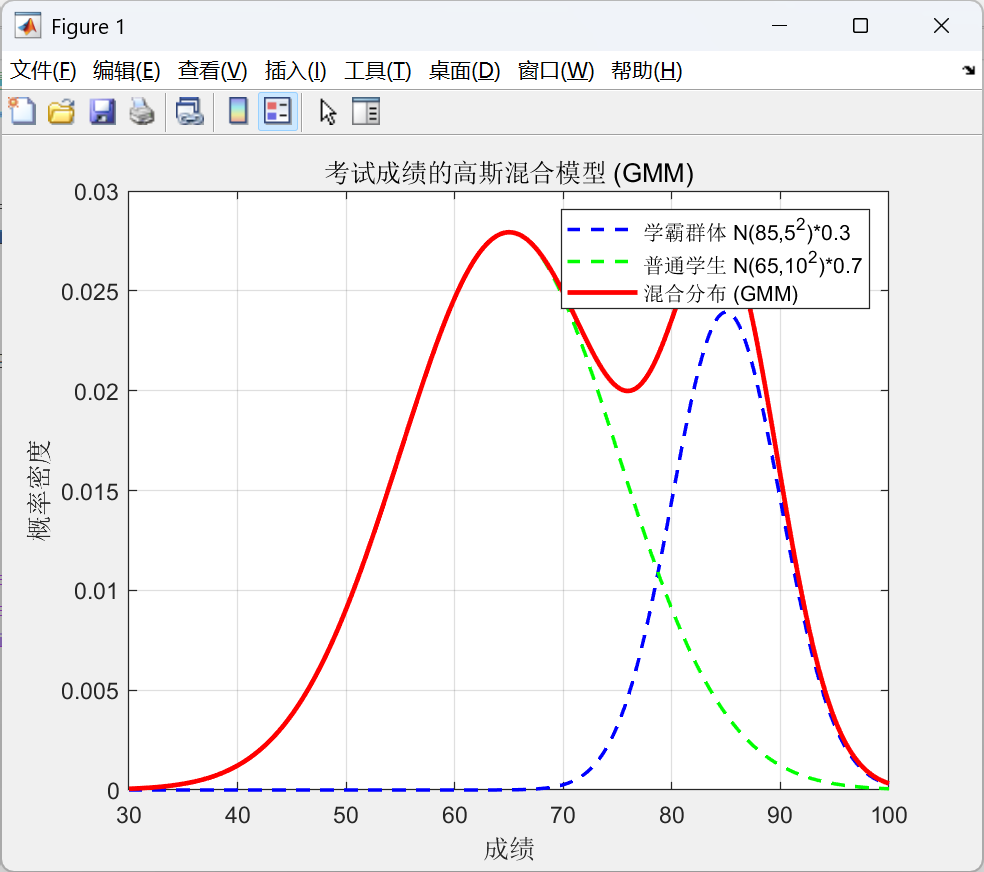
3)一維曲線
使用matlab畫出曲線
x = linspace(30, 100, 500);% 學霸群體參數
mu1 = 85; sigma1 = 5; w1 = 0.3;
pdf1 = w1 * normpdf(x, mu1, sigma1);% 普通學生群體參數
mu2 = 65; sigma2 = 10; w2 = 0.7;
pdf2 = w2 * normpdf(x, mu2, sigma2);% 混合分布
pdf_mix = pdf1 + pdf2;% 繪制
figure;
plot(x, pdf1, 'b--', 'LineWidth', 1.5); hold on;
plot(x, pdf2, 'g--', 'LineWidth', 1.5);
plot(x, pdf_mix, 'r-', 'LineWidth', 2);
grid on;
legend('學霸群體 N(85,5^2)*0.3', ...'普通學生 N(65,10^2)*0.7', ...'混合分布 (GMM)');
title('考試成績的高斯混合模型 (GMM)');
xlabel('成績');
ylabel('概率密度');
二、VAD高斯混合模型
1.模型訓練介紹
1)訓練方法
webrtc關于VAD的高斯混合模型訓練是一種離線訓練,是通過以下幾個步驟得到的:
- 準備數據
- 收集了大量的語音數據(各種語言、男女聲、不同音量)
- 收集了大量的噪聲數據(白噪聲、街道、辦公室、電話線路噪聲等)
- 特征提取
- 對每一幀音頻(10ms ~ 30ms)提取簡單特征:子帶能量、總能量、過零率
- 特征維度很低,不像是MFCC會有多個維度,但適合在嵌入式環境運行
- 擬合高斯分布
- 把“語音幀特征”丟進一個高斯混合模型訓練器
- 把“噪聲幀特征”丟進另一個 GMM 訓練器
- 使用EM算法迭代得到每個分量的均值、方差、權重
- 量化和存儲
- 得到的均值、方差、權重定點數存儲(int16_t),方便在 C 代碼里運行
- 該套參數固定寫死在代碼表里,運行時雖然會根據實際情況修改,但不會在運行后進行存儲
由此我們也可以直覺看出來這套模型的明顯的優缺點:
| 特性 | 優點 | 缺點 |
|---|---|---|
| 計算效率 | 高,適合實時 | 無 |
| 模型復雜度 | 低,易實現 | 表達能力有限 |
| 多模態表示 | 可以區分靜音/語音 | 只適合簡單多模態 |
| 魯棒性 | 可自適應噪聲變化 | 對異常噪聲敏感 |
| 時序建模 | 無 | 需要額外平滑 |
2)訓練結果
webrtc中訓練后的結果是以Q7格式分別存儲在:
kNoiseDataWeights:噪聲的兩個高斯分布權重,表格中的G0和G1kNoiseDataMeans:噪聲的兩個高斯分布均值kNoiseDataStds:噪聲的兩個高斯分布的方差kSpeechDataWeights:噪聲的兩個高斯分布權重,表格中的G0和G1kSpeechDataMeans:噪聲的兩個高斯分布均值kSpeechDataStds:噪聲的兩個高斯分布的方差- G0:低幅度、常見特征,是頻帶特征里的主分量
- G1:高幅度、變化性更大的特征,是頻帶特征里的補充分量
| 頻帶 | 高斯 | Noise 權重 | Speech 權重 | Noise 均值 | Speech 均值 | Noise Std | Speech Std |
|---|---|---|---|---|---|---|---|
| 0 | G0 | 34 | 48 | 6738 | 8306 | 378 | 555 |
| G1 | 62 | 82 | 4892 | 10085 | 1064 | 505 | |
| 1 | G0 | 72 | 45 | 7065 | 10078 | 493 | 567 |
| G1 | 66 | 87 | 6715 | 11823 | 582 | 524 | |
| 2 | G0 | 53 | 50 | 6771 | 11843 | 688 | 585 |
| G1 | 25 | 47 | 3369 | 6309 | 593 | 1231 | |
| 3 | G0 | 94 | 80 | 7646 | 9473 | 474 | 509 |
| G1 | 66 | 46 | 3863 | 9571 | 697 | 828 | |
| 4 | G0 | 56 | 83 | 7820 | 10879 | 475 | 492 |
| G1 | 62 | 41 | 7266 | 7581 | 688 | 1540 | |
| 5 | G0 | 75 | 78 | 5020 | 8180 | 421 | 1079 |
| G1 | 103 | 81 | 4362 | 7483 | 455 | 850 |
在代碼中,將會在WebRtcVad_InitCore接口中存儲在VadInstT結構體中。
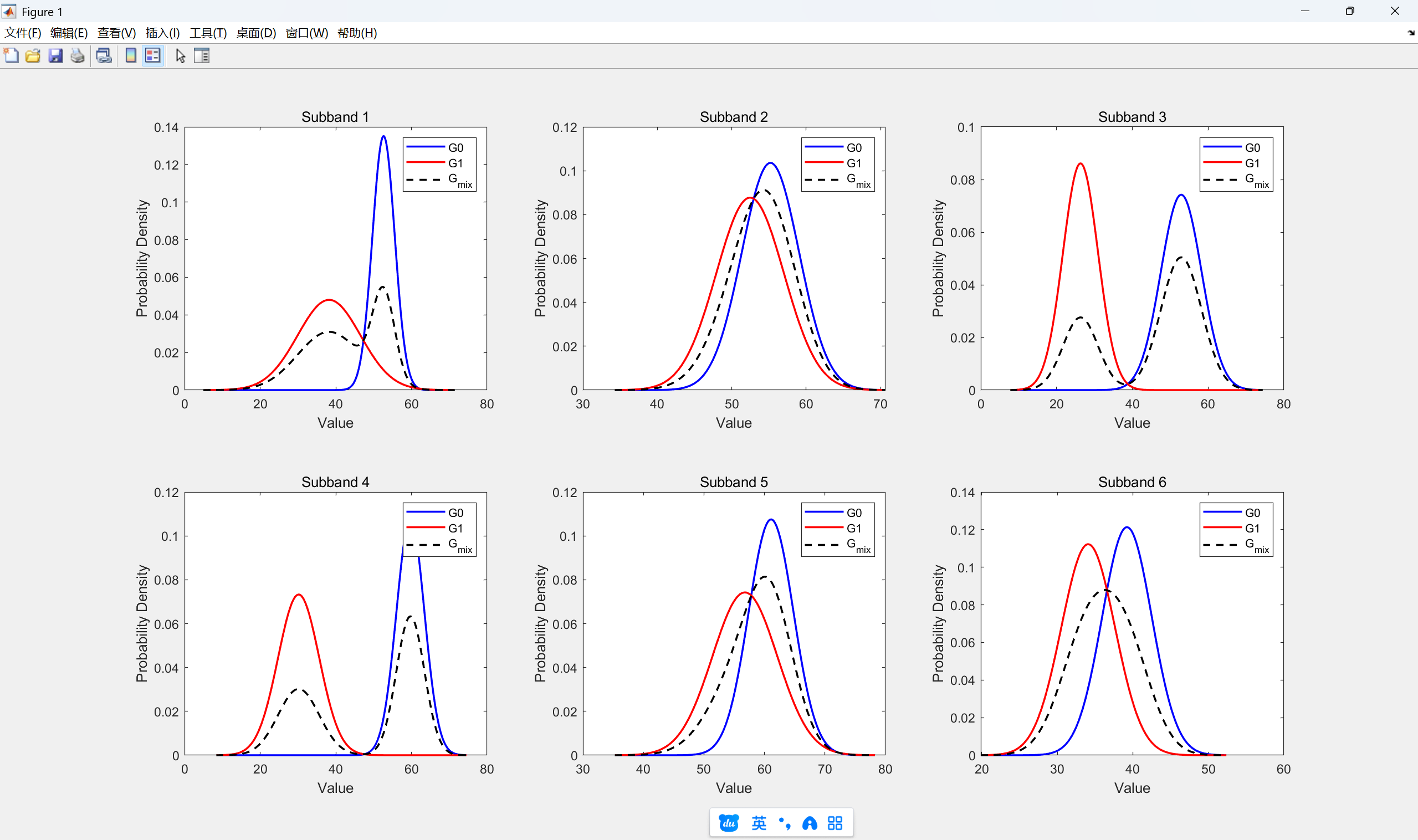
2.噪聲高斯模型分布
下面將根據具體的參數,畫出6個子帶的兩個高斯分布G0,G1圖像,然后再根據權重進行G0和G1加權后的高斯混合圖像。
1)matlab代碼
clc; clear; close all;% 原始 Q7 數據
kNoiseDataMeans_Q7 = [6738, 4892, 7065, 6715, 6771, 3369, 7646, 3863, 7820, 7266, 5020, 4362];
kNoiseDataStds_Q7 = [378, 1064, 493, 582, 688, 593, 474, 697, 475, 688, 421, 455];
kNoiseDataWeights_Q7 = [34, 62, 72, 66, 53, 25, 94, 66, 56, 62, 75, 103];% 轉為 Q0(浮點)
kNoiseDataMeans = double(kNoiseDataMeans_Q7) / 128;
kNoiseDataStds = double(kNoiseDataStds_Q7) / 128;
kNoiseDataWeights = double(kNoiseDataWeights_Q7); % 權重本身可以直接使用kTableSize = length(kNoiseDataMeans);
numBands = kTableSize / 2;figure;for band = 1:numBands% 提取 G0, G1 的參數mean0 = kNoiseDataMeans(2*band-1);mean1 = kNoiseDataMeans(2*band);std0 = kNoiseDataStds(2*band-1);std1 = kNoiseDataStds(2*band);weight0 = kNoiseDataWeights(2*band-1);weight1 = kNoiseDataWeights(2*band);% x 范圍,取 ±4σx_min = min(mean0-4*std0, mean1-4*std1);x_max = max(mean0+4*std0, mean1+4*std1);x = linspace(x_min, x_max, 500);% 高斯分布G0 = (1/(std0*sqrt(2*pi))) * exp(-0.5*((x-mean0)/std0).^2);G1 = (1/(std1*sqrt(2*pi))) * exp(-0.5*((x-mean1)/std1).^2);% 加權混合Gmix = (weight0*G0 + weight1*G1) / (weight0 + weight1);% 繪圖subplot(2,3,band);plot(x, G0, 'b', 'LineWidth',1.5); hold on;plot(x, G1, 'r', 'LineWidth',1.5);plot(x, Gmix, 'k--', 'LineWidth',1.5);title(['Subband ' num2str(band)]);legend('G0','G1','G_{mix}');xlabel('Value'); ylabel('Probability Density');
end
2)結果
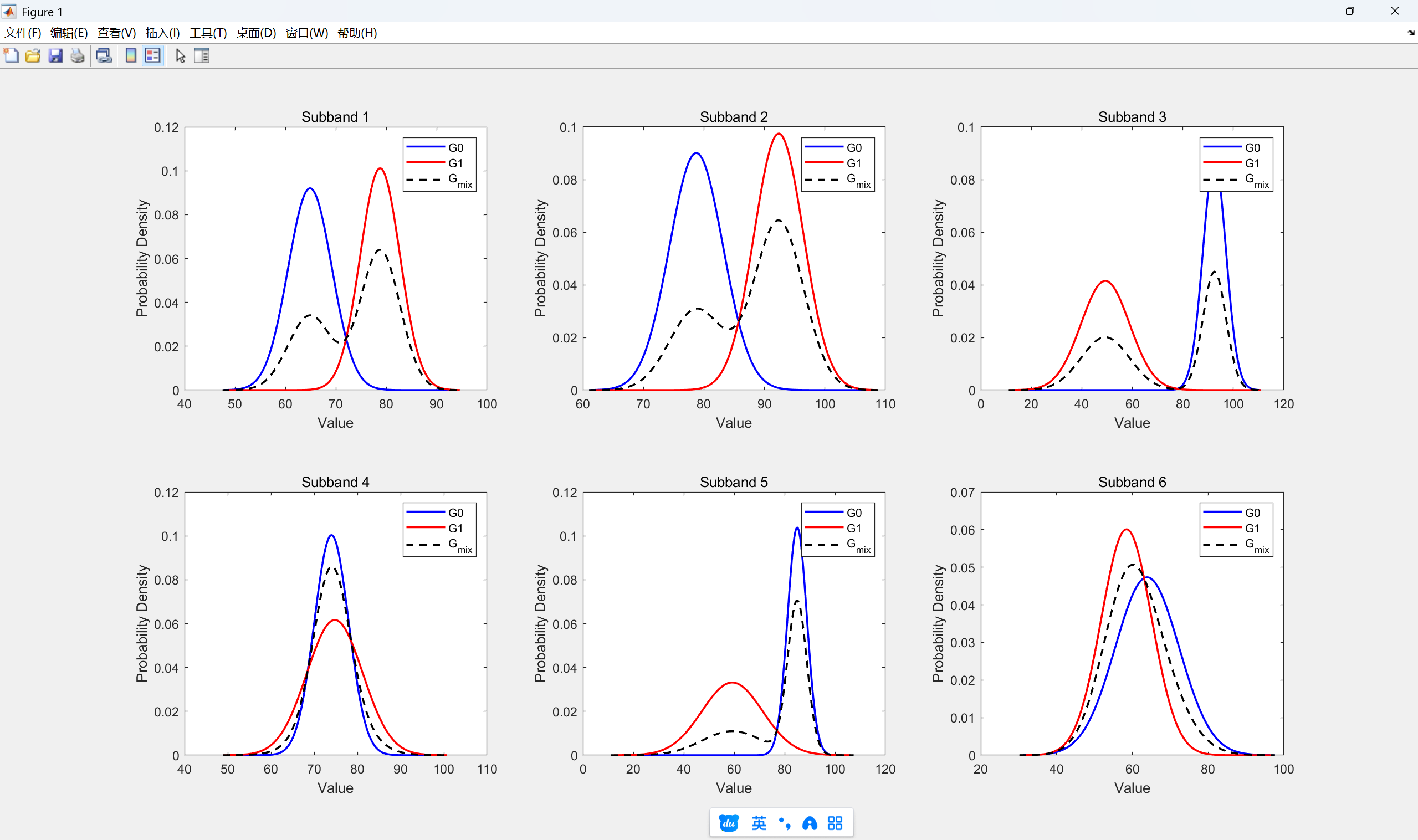
2.人聲高斯模型分布
和計算噪聲高斯模型分布一樣,只需要將matlab中代碼替換即可,這里就不貼出代碼,直接看結果:
三、VAD人聲判斷
在上一篇文章webrtc之語音活動上——VAD能量檢測原理以及源碼詳解中,我們已經知道了:
- 檢測模式的區別
- 幀長劃分方法
- 6個非等寬頻帶的能量
- 頻帶劃分的意義
1.高斯分布計算
1)公式
源碼中關于PDF計算使用Q格式運算以保證精度,其計算公式為:
1σ?exp?(?(x?m)22?σ2)\frac{1}{\sigma} \cdot \exp\Big(-\frac{(x - m)^2} { 2 * \sigma^2}\Big)σ1??exp(?2?σ2(x?m)2?)
該接口的計算方式少了一個2π\sqrt{2\pi}2π?,并且這里同樣將log?\loglog運算簡化,因此它是一個相對值(比例),而縮放后的 PDF是用于相對比較,不是嚴格的概率密度,不會影響后續決策與更新。
2)對應代碼
接口名為WebRtcVad_GaussianProbability,以下是參數和返回值:
input:頻帶能量,以Q4格式保存mean:噪聲/人聲的高斯均值,Q7格式std:噪聲/人聲的高斯方差,Q7格式delta:x?ms2\frac{x-m}{s^2}s2x?m?,用于后續更新模型,Q11格式- 返回值:概率密度,Q20格式
2.人聲判定策略
1)判斷機制
VAD判斷人聲是雙重機制:
- 局部判定: 捕捉某個子帶特別強烈的語音
- 全局判定:要求整體證據夠強
- 最終決策:兩者取 OR,既保證靈敏度,又保證魯棒性
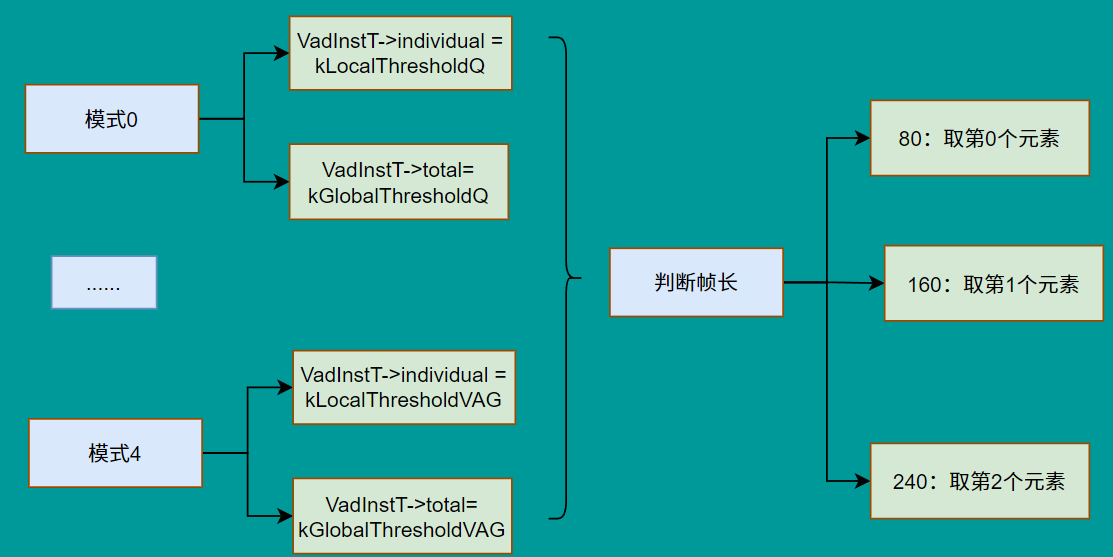
2)重要閾值確認
在設置模式WebRtcVad_set_mode_core接口里,確定
individual:單個頻帶人聲閾值范圍,用于局部判定total:整體人聲閾值閾值范圍,用于整體
而對于不同幀長再進一步確定閾值,這里是在GmmProbability真正進行決策的地方進行確定。而對于:
- 短幀10ms:由于信息少,則使用高閾值以避免誤判
- 中等20ms:閾值低,放寬一些
- 長幀30ms:本身信息穩定,為了避免太寬松 又設高
除此之外,在進行全局判定時,不同頻帶的權重存儲在kSpectrumWeight中。
值得注意的是,這些閾值的由來是根據大規模實驗 + ROC 曲線分析 + 主觀聽感測試 手工調出來的經驗值。
3)整體流程
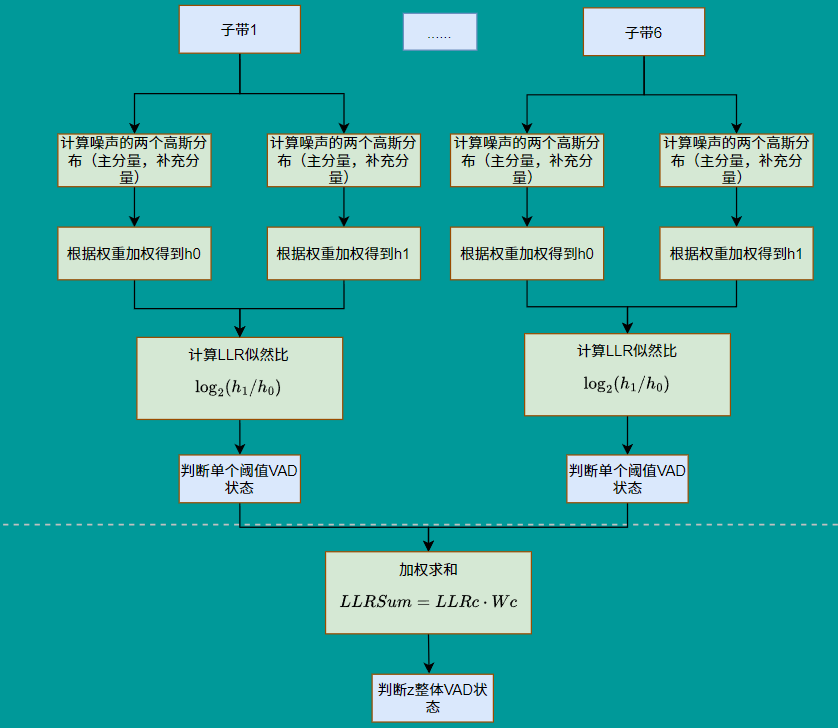
第一步:計算噪聲/人聲概率分布
同一段頻帶語音根據噪聲/人聲的高斯參數,分別進行計算主分量/補充分量的概率分布,再根據權值計算真正的概率密度,代碼如下:
for (channel = 0; channel < kNumChannels; channel++) {h0_test = 0;h1_test = 0;for (k = 0; k < kNumGaussians; k++) {gaussian = channel + k * kNumChannels;tmp1_s32 = WebRtcVad_GaussianProbability(features[channel],self->noise_means[gaussian],self->noise_stds[gaussian],&deltaN[gaussian]);noise_probability[k] = kNoiseDataWeights[gaussian] * tmp1_s32;h0_test += noise_probability[k]; // Q27tmp1_s32 = WebRtcVad_GaussianProbability(features[channel],self->speech_means[gaussian],self->speech_stds[gaussian],&deltaS[gaussian]);speech_probability[k] = kSpeechDataWeights[gaussian] * tmp1_s32;h1_test += speech_probability[k]; // Q27}
第二步:噪聲/人聲比較
判斷單個頻帶是否為人聲使用的是似然對數比,也就是log?2(Pr(X∣H1)Pr(X∣H0))\log2(\frac{Pr(X|H1)}{Pr(X|H0)})log2(Pr(X∣H0)Pr(X∣H1)?),這么做的好處是:
- 避免概率數值太小引起數值問題
- LLR 的加和性質,可以進行多個頻帶綜合判定
值得注意的是:這近似在數幀平均下通常偏差較小,但對極端 / 較小樣本會產生偏差,所以后面通過局部+全局、hangover機制與模型更新來抵消誤判。
這里的移位操作是為了簡化log?\loglog運算,用最高位表示為整數部分,用整數位的差值來近似log?2(h1/h0)\log2(h1/h0)log2(h1/h0),核心代碼為:
shifts_h0 = WebRtcSpl_NormW32(h0_test);shifts_h1 = WebRtcSpl_NormW32(h1_test);if (h0_test == 0) {shifts_h0 = 31;}if (h1_test == 0) {shifts_h1 = 31;}log_likelihood_ratio = shifts_h0 - shifts_h1;
第三步:判斷單個閾值
如果單個頻帶的信號人聲強烈,將會直接認定為語音,值得注意的是即使判斷為人聲了,還是會接著計算其他頻帶,這是為了更新模型。核心代碼為:
if ((log_likelihood_ratio * 4) > individualTest) {vadflag = 1;}
第四步:全局判定
這里分為兩部分
- 根據權重加合
- 整體閾值判斷
其核心代碼如下:
sum_log_likelihood_ratios +=(int32_t) (log_likelihood_ratio * kSpectrumWeight[channel]);.......vadflag |= (sum_log_likelihood_ratios >= totalTest);
四、模型更新
在進行模型更新時,需要考慮到平滑處理,所以這里運用到大量的平滑濾波的思想,見文章語音信號處理三十一——常用的時域/頻域平滑濾波。
1.計算條件概率
首先獲取各個頻帶噪聲/人聲在主分量和補充分量的條件概率,分別存儲在ngprvec和sgprvec中。
如果h<0h<0h<0,那么默認該數值必然是主分量特征,以下是噪聲的條件概率核心代碼,人聲類似:
h0 = (int16_t) (h0_test >> 12); // Q15if (h0 > 0) {tmp1_s32 = (noise_probability[0] & 0xFFFFF000) << 2; // Q29ngprvec[channel] = (int16_t) WebRtcSpl_DivW32W16(tmp1_s32, h0); // Q14ngprvec[channel + kNumChannels] = 16384 - ngprvec[channel];} else {ngprvec[channel] = 16384;}
2.獲取噪聲基線和均值
1)噪聲基線的作用
WebRTC VAD 和很多能量型 VAD 都是基于一個基本假設:在連續音頻信號中,語音的能量通常高于環境噪聲的能量。
而噪聲基的含義是指:環境噪聲在短時間或一段時間內的平均能量水平或特征值參考。
2)確定噪聲基線
噪聲基線的獲取是一種中值濾波的思想。在接口WebRtcVad_FindMinimum中,它的大致流程為:
輸入: feature_value, channel, self┌─? [1] 更新歷史值的年齡
│ ├─ 遍歷16個存儲的最小值
│ ├─ age < 100 → age++
│ └─ age == 100 → 移除該值,數組前移,最后位置填充大數
│
└─? [2] 判斷是否插入新值├─ feature_value 比數組中的某些值小│ └─ 找到插入位置 position│ └─ 從尾部往后移,插入新值,age=1└─ 否則丟棄(說明它不是最小16個之一)┌─? [3] 計算當前中位數
│ ├─ frame_counter > 2 → 取 smallest_values[2] (第3小)
│ └─ frame_counter <= 2 → 取 smallest_values[0] (最小值)
│
└─? [4] 平滑更新 mean_value[channel]├─ 如果 current_median < mean_value → α = 0.2 (快速下降)└─ 否則 α = 0.99 (緩慢上升)└─ mean_value[channel] ← α * mean_value[channel] + (1-α) * current_median[5] 返回 mean_value[channel]這里可以對照代碼進行理解。
3)獲取噪聲均值
實現主要在WeightedAverage接口內,該接口的使用方法為:
- 輸入主分量和補充分量的均值
- 輸入對應的權重
- 輸出計算后的均值
3.更新噪聲均值
1)短時更新
WebRTC 里不可能每次都存很多幀再做完整的EM,并且GMM更新中webrtc希望帶權,所以這里采用的是梯度遞推進行更新,公式為:
μnoisenow=μnoiseold+η?γnow(x?μnoiseold)\mu_{noise}^{now} = \mu_{noise}^{old}+\eta\cdot \gamma_{now}(x-\mu_{noise}^{old})μnoisenow?=μnoiseold?+η?γnow?(x?μnoiseold?)
- η\etaη:權系數
- γnow\gamma_{now}γnow?:當前頻帶當前分量的條件概率
由于篇幅原因,這里不做推導了,可以看看別的文章,或者可以私信博主
這里加權是并不希望噪聲平均變化過快。對應代碼為:
static const int16_t kNoiseUpdateConst = 655; // Q15
nmk2 = nmk;
if (!vadflag) {delt = (int16_t)((ngprvec[gaussian] * deltaN[gaussian]) >> 11);nmk2 = nmk + (int16_t)((delt * kNoiseUpdateConst) >> 22);
}
2)平滑修正
首先會用噪聲基線減去頻帶噪聲均值得到差值,再根據差值進行指數加權移動平均的思想,和當前幀的噪聲均值相加為下一幀的噪聲均值,對應代碼:
ndelt = (feature_minimum << 4) - tmp1_s16;
nmk3 = nmk2 + (int16_t)((ndelt * kBackEta) >> 9);
值得注意的是:平滑修正不受vadflag影響
3)邊界約束
即強制噪聲均值不能小于某個最小值,和防止噪聲均值過大,避免它被語音能量無限拉升。代碼如下:
tmp_s16 = (int16_t) ((k + 5) << 7);if (nmk3 < tmp_s16) {nmk3 = tmp_s16;}tmp_s16 = (int16_t) ((72 + k - channel) << 7);if (nmk3 > tmp_s16) {nmk3 = tmp_s16;}
4)策略意義
對于nmk2會受到γ\gammaγ的影響,而γ\gammaγ并不是固定常數,而是隨著當前幀的條件概率變動,一旦語音能量進入,更新方向就會發生錯誤。此時平滑修正的意義就體現出來:
- 短時更新可能受到語音污染,可能偏離真實噪聲基線
- 如果當前幀判定為非噪聲,那么均值會被
kBackEta慢慢收斂回長期基線
4.更新人聲均值
和更新噪聲均值一樣的梯度更新計算方法,只是區別是:
- 不需要進行長期拉回,因為人聲是特征動態明顯,不需要噪聲基線作為參考
- 噪聲的限幅控制是為了保證模型穩定,避免漂移到語音區,而人聲限幅是跟隨語音分布變化,防止過度漂移,所以限幅范圍不同
- 人聲均值向上取整而不是向下取整
smk2 = smk + ((tmp_s16 + 1) >> 1);
5.更新人聲方差
1)更新公式
和上文一樣,這里采用的是遞推更新:
σnew=σold+η?wkσold((x?μold2)σold2?1)\sigma_{new}=\sigma_{old}+\eta\cdot \frac{w_k}{\sigma_{old}}\Big(\frac{(x-\mu_{old}^2)}{\sigma^2_{old}} -1\Big)σnew?=σold?+η?σold?wk??(σold2?(x?μold2?)??1)
2)代碼解析
tmp_s16 = ((smk + 4) >> 3);tmp_s16 = features[channel] - tmp_s16; tmp1_s32 = (deltaS[gaussian] * tmp_s16) >> 3;tmp2_s32 = tmp1_s32 - 4096;tmp_s16 = sgprvec[gaussian] >> 2;tmp1_s32 = tmp_s16 * tmp2_s32;tmp2_s32 = tmp1_s32 >> 4; if (tmp2_s32 > 0) {tmp_s16 = (int16_t) WebRtcSpl_DivW32W16(tmp2_s32, ssk * 10);} else {tmp_s16 = (int16_t) WebRtcSpl_DivW32W16(-tmp2_s32, ssk * 10);tmp_s16 = -tmp_s16;}tmp_s16 += 128; // Rounding.ssk += (tmp_s16 >> 8);
其中:
- wkw_kwk?:來自于
sgprvec - η\etaη:為0.025,代碼中體現在
WebRtcSpl_DivW32W16產生了0.1的分母,sgprvec[gaussian] >> 2產生了4的分母 tmp_s16 = ((smk + 4) >> 3):這里的加4原因是為了保證右移3位是向上取整保存精度
3)邊界約束
方差值不能小于384
static const int16_t kMinStd = 384;
if (ssk < kMinStd) {ssk = kMinStd;}
6.更新噪聲方差
和更新人聲方差一樣,區別在于更新步長的大小是根據偏移量決定的,不過范圍大致在0.015~0.02 之間。
7.模型分離
為了防止speech GMM 模型和 noise GMM 模型的均值太接近而粘在一起,需要最終結合兩者進行決策。
1)計算全局均值
noise_global_mean = WeightedAverage(&self->noise_means[channel], 0, &kNoiseDataWeights[channel]);
speech_global_mean = WeightedAverage(&self->speech_means[channel], 0, &kSpeechDataWeights[channel]);
- 對每個 channel,把各個高斯分量的均值做加權平均。
- 得到一個 全局 noise 平均值 和一個 全局 speech 平均值。
2)計算差值
diff = (int16_t)(speech_global_mean >> 9) - (int16_t)(noise_global_mean >> 9);
- speech 全局均值 ? noise 全局均值。
- 如果差值太小,說明兩個模型過于接近
3)如果模型太近,強行拉開
if (diff < kMinimumDifference[channel]) {tmp_s16 = kMinimumDifference[channel] - diff;// tmp1_s16 ≈ 0.8 * (缺口)// tmp2_s16 ≈ 0.2 * (缺口)// 把 speech 模型整體往上推一點speech_global_mean = WeightedAverage(&self->speech_means[channel],tmp1_s16, &kSpeechDataWeights[channel]);// 把 noise 模型整體往下拉一點noise_global_mean = WeightedAverage(&self->noise_means[channel],-tmp2_s16, &kNoiseDataWeights[channel]);
}
- 如果 gap 太小,就把 speech 往上推 80%,noise 往下拉 20%,強制保持至少
kMinimumDifference的區分度。 - 這樣避免兩個模型均值重疊,保持判決的魯棒性。
4)限制模型漂移范圍
if (speech_global_mean >> 7 > kMaximumSpeech[channel]) {// speech 上限...
}
if (noise_global_mean >> 7 > kMaximumNoise[channel]) {// noise 上限...
}
作用是給 speech 和 noise 均值設上界,避免模型被極端值推得太遠。
五、hangover 機制
1.策略作用
WebRTC VAD 的hangover 機制,用來在語音剛結束時 延長一小段時間繼續判為語音,避免抖動。
2.整體流程
檢測到語音 → num_of_speech++├─ 如果 num_of_speech <= kMaxSpeechFrames → over_hang = overhead1└─ 如果 num_of_speech > kMaxSpeechFrames → over_hang = overhead2檢測到非語音├─ 如果 over_hang > 0 → 繼續輸出語音, over_hang--└─ 如果 over_hang = 0 → 輸出靜音
其中:
- overhead1:給短語音的尾巴加一點點余量。
- overhead2:給長語音的尾巴加更長的余量。
- num_of_speech:用來區分當前語音段的“長/短”。
- over_hang:用來平滑語音和靜音的切換,防止“斷斷續續”
3.對應代碼
1)非語音處理
if (!vadflag) {if (self->over_hang > 0) {vadflag = 2 + self->over_hang;self->over_hang--;}self->num_of_speech = 0;
}
-
但 hangover 計數器
over_hang > 0:說明前面剛有語音 → 進入“延長語音”階段- 把 vadflag 設置為
2 + self->over_hang(這里 2 是特殊標記,表明這不是直接檢測出的語音,而是 hangover 延長出來的語音) over_hang--:計數器遞減
- 把 vadflag 設置為
-
否則就徹底當作 silence
-
num_of_speech = 0:清零語音幀計數器
2)語音
else {self->num_of_speech++;if (self->num_of_speech > kMaxSpeechFrames) {self->num_of_speech = kMaxSpeechFrames;self->over_hang = overhead2;} else {self->over_hang = overhead1;}
}
num_of_speech++:累計連續語音幀數- 如果超過
kMaxSpeechFrames(最大語音幀數限制):- 把
num_of_speech固定到上限 over_hang = overhead2(長的 hangover 時間)
- 把
- 否則:
over_hang = overhead1(短的 hangover 時間)
總結
WebRTC VAD 展示了一個典型的“經典信號處理 + 工程優化”方案:
- 在特征層面,采用子帶能量的對數刻畫,使得語音與噪聲分布更接近高斯;
- 在模型層面,使用固定參數的雙高斯混合模型,結合局部和全局判決,提高魯棒性;
- 在實現層面,大量利用 Q 格式、移位近似、預計算表,保證了低算力環境下的實時性;
- 在動態性上,通過逐幀更新和邊界約束,使模型能逐漸適應環境變化。
當然,這種基于 GMM 的方法也有局限:在強噪聲、非平穩噪聲環境下可能誤判,且閾值調優高度依賴經驗。隨著算力提升,DNN/RNN 基的 VAD 在魯棒性上表現更優,但代價是更高的復雜度與延遲。
反正收藏也不會看,不如點個贊吧!







)











