文章目錄
- 一、什么是圖像金字塔?
- 二、圖像金字塔的核心操作:采樣與逆采樣
- 1. 向下采樣(pyrDown):從高分辨率到低分辨率
- 步驟1:高斯濾波
- 步驟2:刪除偶數行與偶數列
- OpenCV實戰代碼
- 效果特點
- 2. 向上采樣(pyrUp):從低分辨率到高分辨率
- 步驟 1:插值補全像素
- 步驟 2:高斯濾波
- OpenCV 實戰代碼
- 效果特點
- 三、拉普拉斯金字塔:捕捉采樣丟失的細節
- 1. 拉普拉斯金字塔的定義
- 2. 拉普拉斯金字塔的核心作用:圖像恢復與融合
- OpenCV 實戰:圖像恢復
- 效果特點
- 四、圖像金字塔的典型應用場景
- 1. 特征點提取(SIFT、ORB 等)
- 2. 模板匹配
- 3. 圖像融合
- 4. 光流跟蹤
- 五、總結與注意事項
- 核心知識點
- 注意事項
- 注意事項
在計算機視覺領域,如何高效處理不同尺度下的圖像信息,是實現 目標檢測、特征提取、圖像融合等任務的關鍵。圖像金字塔(Image Pyramid)作為一種經典的多分辨率表示方法,通過將圖像分解為不同分辨率的子圖集合,為解決上述問題提供了簡潔而強大的思路。本文將從圖像金字塔的基本概念出發,深入解析其核心操作(向下采樣與向上采樣)、數學原理,并結合OpenCV實戰代碼與典型應用場景,帶你全面掌握這一技術。
一、什么是圖像金字塔?
圖像金字塔是由同一幅圖像的多個不同分辨率子圖構成的集合,因其層級結構形似“金字塔”而得名。其核心特征如下:
- 層級關系:金字塔的底部是原始高分辨率圖像(記為G?),向上每一層(G?、G?、…、G?)的分辨率都逐步降低,頂部可能僅保留1個像素點。
- 分辨率變化規律:通常每向上移動一層,圖像的寬度和高度會縮小為前一層的1/2,像素總數減少為1/4(也可根據需求調整縮放比例)。
- 核心作用:將單分辨率圖像轉化為多尺度表示,讓算法能在不同“尺度”下分析圖像(例如大尺度檢測目標整體,小尺度捕捉細節)。
示例:若原始圖像為512×512(G?),經過1次向下采樣得到256×256的G?,再采樣得到128×128的G?,以此類推,最終形成“底層大、上層小”的金字塔結構。

二、圖像金字塔的核心操作:采樣與逆采樣
圖像金字塔的構建依賴兩種基礎操作:向下采樣(降采樣) 和向上采樣(升采樣)。這兩種操作是金字塔分層的核心,但需注意:
它們并非可逆過程——對圖像先降采樣再升采樣,無法恢復原始圖像的細節(會丟失信息)。
1. 向下采樣(pyrDown):從高分辨率到低分辨率
向下采樣是構建高斯金字塔的核心步驟,目的是降低圖像分辨率,生成金字塔的上一層子圖。其操作遵循“先濾波、再抽樣”的原則,具體流程如下:
步驟1:高斯濾波
首先對當前圖像(如G?)進行高斯模糊處理。這一步的核心目的是抑制高頻噪聲——若直接刪除像素,會導致圖像邊緣出現鋸齒或偽影,高斯濾波通過對鄰域像素加權平均,平滑圖像并保留主要結構。
高斯濾波的權重由二維高斯函數決定:
G(x,y)=12πσ2e?x2+y22σ2G(x,y) = \frac{1}{2\pi\sigma^2} e^{-\frac{x^2 + y^2}{2\sigma^2}} G(x,y)=2πσ21?e?2σ2x2+y2?
其中,σ為高斯核的標準差(控制模糊程度),通常使用3×3或5×5的高斯核(如3×3核:[121242121]\begin{bmatrix}1&2&1\\2&4&2\\1&2&1\end{bmatrix}?121?242?121??,需歸一化后使用)。
步驟2:刪除偶數行與偶數列
對濾波后的圖像,刪除所有偶數行和偶數列。例如512×512的圖像經此操作后,變為256×256(寬度和高度各減半),像素總數變為原來的1/4。
OpenCV實戰代碼
import cv2# 讀取原始灰度圖像(G0)
img = cv2.imread("face.png", cv2.IMREAD_GRAYSCALE)
cv2.imshow("Original (G0)", img)
cv2.waitKey(0)# 第一次向下采樣(G1:256×256)
img_down1 = cv2.pyrDown(img)
cv2.imshow("Down Sample 1 (G1)", img_down1)
cv2.waitKey(0)# 第二次向下采樣(G2:128×128)
img_down2 = cv2.pyrDown(img_down1)
cv2.imshow("Down Sample 2 (G2)", img_down2)
cv2.waitKey(0)cv2.destroyAllWindows()
效果特點
- 分辨率降低,尺寸縮小;
- 因高斯濾波和平滑,圖像整體更模糊,細節(如邊緣、紋理)逐漸丟失;
- 每一層都保留了前一層的“概覽信息”(如目標的整體形狀)。
2. 向上采樣(pyrUp):從低分辨率到高分辨率
向上采樣是向下采樣的逆操作,目的是恢復圖像分辨率(生成比當前層更大的子圖),但無法恢復向下采樣時丟失的細節。其操作流程為“先插值、再濾波”:
步驟 1:插值補全像素
對當前低分辨率圖像(如 G?),在每個像素的行和列之間插入 0 值。例如 256×256 的圖像經此操作后,變為 512×512——新圖像的寬度和高度翻倍,但插入的 0 值會導致圖像出現“網格狀”空洞。
步驟 2:高斯濾波
用與向下采樣相同的高斯核(需放大 4 倍以匹配像素密度)對插值后的圖像進行濾波,填充空洞并平滑圖像。例如 3×3 高斯核需調整為 [121242121]\begin{bmatrix}1&2&1\\2&4&2\\1&2&1\end{bmatrix}?121?242?121??(與向下采樣核一致,因插值后像素密度變為原來的 1/4,核權重需保持對應)。
OpenCV 實戰代碼
# 對G1進行向上采樣(恢復為512×512,但細節丟失)
img_down1_up = cv2.pyrUp(img_down1)
cv2.imshow("Down1 -> Up (G1')", img_down1_up)
cv2.waitKey(0)# 對比原始圖像與“降采樣+升采樣”結果
cv2.imshow("Original (G0)", img)
cv2.imshow("Down1 -> Up (G1')", img_down1_up)
cv2.waitKey(0)
cv2.destroyAllWindows()
效果特點
- 尺寸與原始圖像一致(如 512×512),但清晰度遠低于原始圖像;
- 因丟失的高頻細節無法恢復,圖像整體偏模糊,邊緣過渡不銳利;
- 驗證了 “采樣不可逆” 的特性 —— 降采樣丟失的信息無法通過升采樣完全找回。
三、拉普拉斯金字塔:捕捉采樣丟失的細節
既然向下采樣會丟失細節,如何保留這些信息以便后續恢復圖像?拉普拉斯金字塔(Laplacian Pyramid) 應運而生。它通過計算 “原始圖像與‘降采樣后再升采樣’圖像的差值”,記錄每一層向下采樣時丟失的高頻細節(邊緣、紋理等)。
1. 拉普拉斯金字塔的定義
拉普拉斯金字塔的第 i 層(LiL_iLi?)計算公式為:
Li=Gi?pyrUp(pyrDown(Gi))L_i = G_i - \text{pyrUp}(\text{pyrDown}(G_i)) Li?=Gi??pyrUp(pyrDown(Gi?))
其中:
- GiG_iGi?:高斯金字塔的第 i 層(原始或降采樣后的圖像);
- pyrUp(pyrDown(Gi))\text{pyrUp}(\text{pyrDown}(G_i))pyrUp(pyrDown(Gi?)):對 GiG_iGi? 先降采樣再升采樣的結果(尺寸與 GiG_iGi? 一致,但細節丟失);
- LiL_iLi?:差值圖像,記錄了 GiG_iGi? 中被降采樣丟失的高頻細節(邊緣、紋理等)。
示例:
- L0=G0?pyrUp(pyrDown(G0))L_0 = G_0 - \text{pyrUp}(\text{pyrDown}(G_0))L0?=G0??pyrUp(pyrDown(G0?)) → 記錄 G0G_0G0? 到 G1G_1G1? 丟失的細節;
- L1=G1?pyrUp(pyrDown(G1))L_1 = G_1 - \text{pyrUp}(\text{pyrDown}(G_1))L1?=G1??pyrUp(pyrDown(G1?)) → 記錄 G1G_1G1? 到 G2G_2G2? 丟失的細節;
- 以此類推,拉普拉斯金字塔的頂層為高斯金字塔的頂層(無更高層可采樣)。
2. 拉普拉斯金字塔的核心作用:圖像恢復與融合
拉普拉斯金字塔的最大價值在于恢復高分辨率圖像。通過“高斯金字塔的高層圖像 + 拉普拉斯金字塔的對應細節”,可逐步重建原始圖像:
- 從高斯金字塔頂層 GnG_nGn? 開始,對其進行升采樣:pyrUp(Gn)\text{pyrUp}(G_n)pyrUp(Gn?);
- 加上拉普拉斯金字塔的 Ln?1L_{n-1}Ln?1? 層,得到 Gn?1G_{n-1}Gn?1?:$ G_{n-1} = \text{pyrUp}(G_n) + L_{n-1} $;
- 重復步驟 1 - 2,直到恢復出原始圖像 G0G_0G0?。
OpenCV 實戰:圖像恢復
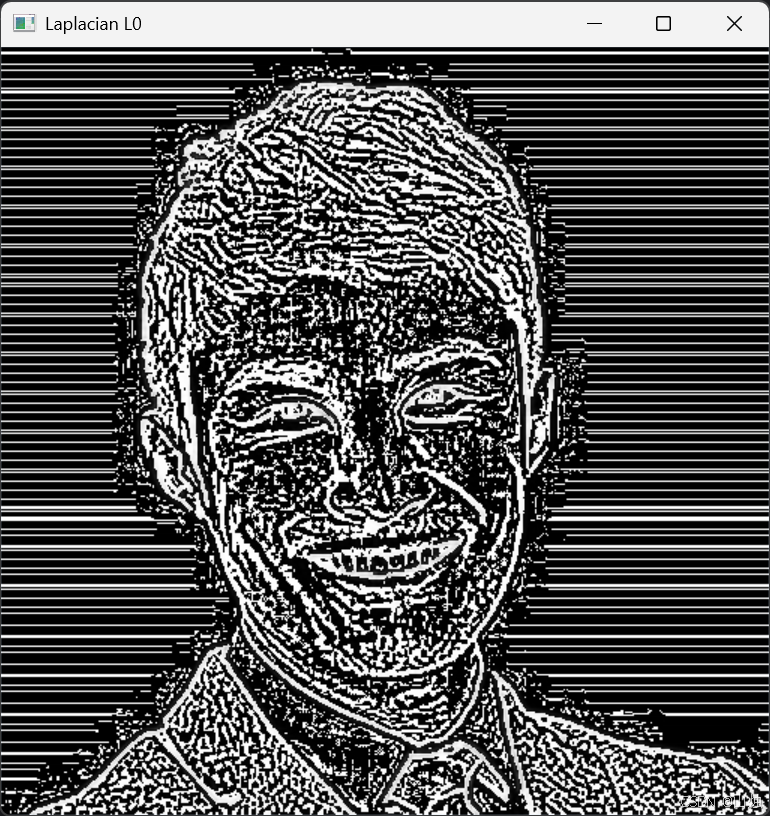
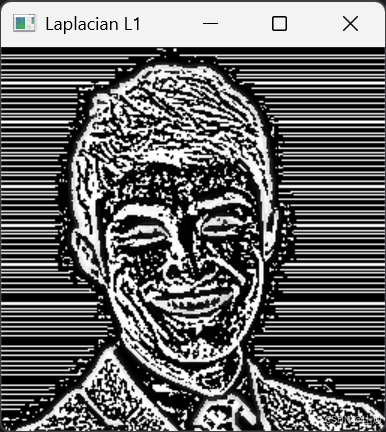
# 計算拉普拉斯金字塔L0和L1
L0 = img - cv2.pyrUp(img_down1) # G0 - pyrUp(G1)
L1 = img_down1 - cv2.pyrUp(img_down2) # G1 - pyrUp(G2)# 顯示拉普拉斯細節(黑色背景下的白色邊緣,即丟失的細節)
cv2.imshow("Laplacian L0", L0)
cv2.imshow("Laplacian L1", L1)
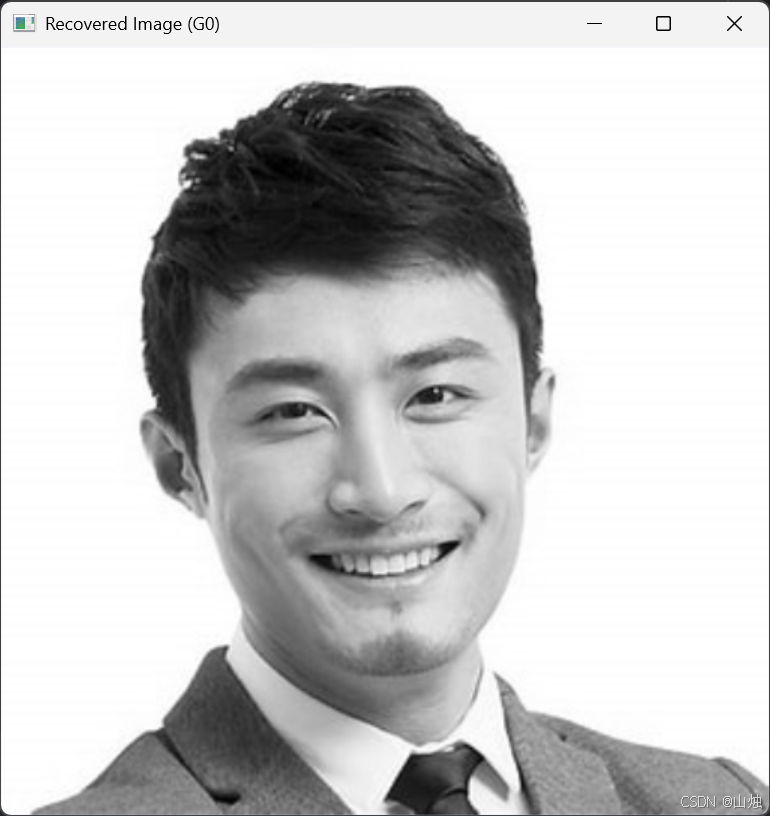
cv2.waitKey(0)# 用L0恢復原始圖像:pyrUp(G1) + L0 = G0
recovered_img = cv2.pyrUp(img_down1) + L0
cv2.imshow("Recovered Image (G0)", recovered_img)
cv2.imshow("Original Image (G0)", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
效果特點
- 拉普拉斯圖像(L0L_{0}L0?、L1L_{1}L1?)以 “黑色背景 + 白色邊緣” 為主,直觀展示了各層丟失的細節;
- 恢復后的圖像與原始圖像幾乎一致(微小差異來自數值精度),驗證了拉普拉斯金字塔的細節保留能力。
四、圖像金字塔的典型應用場景
圖像金字塔的多尺度特性使其成為計算機視覺的基礎工具,廣泛應用于以下場景:
1. 特征點提取(SIFT、ORB 等)
SIFT(尺度不變特征變換)是經典的特征提取算法,其核心是“在不同尺度下檢測穩定的特征點”。圖像金字塔為 SIFT 提供了多尺度基礎:
- 對原始圖像構建高斯金字塔(不同 σ 的模糊圖像);
- 計算相鄰層的差值(高斯差分金字塔,DoG),檢測極值點(潛在特征點);
- 結合拉普拉斯金字塔的細節,篩選出尺度不變的特征點,用于圖像匹配、目標識別。
2. 模板匹配
模板匹配是在大圖像中尋找與小模板相似區域的任務。若直接在原始圖像中匹配,可能因“模板與目標尺度不一致”導致匹配失敗。圖像金字塔的解決方案是:
- 對原始圖像和模板分別構建金字塔;
- 從金字塔頂層(低分辨率)開始匹配,快速定位大致區域;
- 逐步向下層(高分辨率)細化匹配,提高精度。
這種“從粗到細”的匹配方式,既提升了速度,又解決了尺度不一致問題。
3. 圖像融合
在圖像拼接(如全景圖)或曝光融合中,需將多幅圖像的重疊區域平滑過渡。圖像金字塔的融合流程為:
- 對每幅圖像構建高斯金字塔(獲取不同尺度的概覽);
- 構建對應的拉普拉斯金字塔(獲取不同尺度的細節);
- 在拉普拉斯金字塔的每一層,對重疊區域進行加權融合(如左側圖像權重從 1→0,右側從 0→1);
- 從融合后的拉普拉斯金字塔頂層開始,逐步向上恢復,得到最終融合圖像。
優勢:可避免融合邊緣出現 “拼接痕跡”,實現平滑過渡。
4. 光流跟蹤
光流跟蹤用于檢測視頻中運動目標的 “瞬時速度”。由于目標可能在視頻中縮放(如靠近 / 遠離攝像頭),需在多尺度下跟蹤:
- 對視頻的連續幀構建圖像金字塔;
- 在頂層(低分辨率)跟蹤目標的大致運動方向;
- 向下層(高分辨率)細化跟蹤位置,提高精度;
- 結合各層結果,得到目標在原始分辨率下的光流向量。
五、總結與注意事項
圖像金字塔作為計算機視覺的基礎技術,其核心價值在于將單分辨率圖像轉化為多尺度表示,解決了 “尺度不一致”“細節與概覽平衡” 等關鍵問題。
核心知識點
- 高斯金字塔:通過 “向下采樣” 構建,每一層都是前一層的低分辨率平滑版本,用于獲取圖像的概覽信息;
- 向上采樣:恢復圖像尺寸但無法恢復細節,驗證了 “采樣不可逆”;
- 拉普拉斯金字塔:記錄向下采樣丟失的細節,用于圖像恢復與融合;
- 應用場景:特征提取(SIFT)、模板匹配、圖像融合、光流跟蹤等。
注意事項
- 分辨率變化:默認每一層的寬 / 高為前一層的 1/2,需注意圖像尺寸需為 2 的整數次冪(如 512、256),否則可能出現尺寸偏差;
- 噪聲影響:向下采樣前的高斯濾波需合理選擇 σ(過小易保留噪聲,過大易模糊細節);
錄向下采樣丟失的細節,用于圖像恢復與融合;
- 應用場景:特征提取(SIFT)、模板匹配、圖像融合、光流跟蹤等。
注意事項
- 分辨率變化:默認每一層的寬 / 高為前一層的 1/2,需注意圖像尺寸需為 2 的整數次冪(如 512、256),否則可能出現尺寸偏差;
- 噪聲影響:向下采樣前的高斯濾波需合理選擇 σ(過小易保留噪聲,過大易模糊細節);
- OpenCV 函數細節:
cv2.pyrDown()和cv2.pyrUp()的dstsize參數可自定義輸出尺寸,但需遵循 “向下采樣為 1/2,向上采樣為 2 倍” 的原則,否則會導致后續計算錯誤。
負載均衡集群介紹)

)



--基礎知識點)
)




)


)


:保姆級教程+避坑指南)
