目錄
壹 創建骨骼
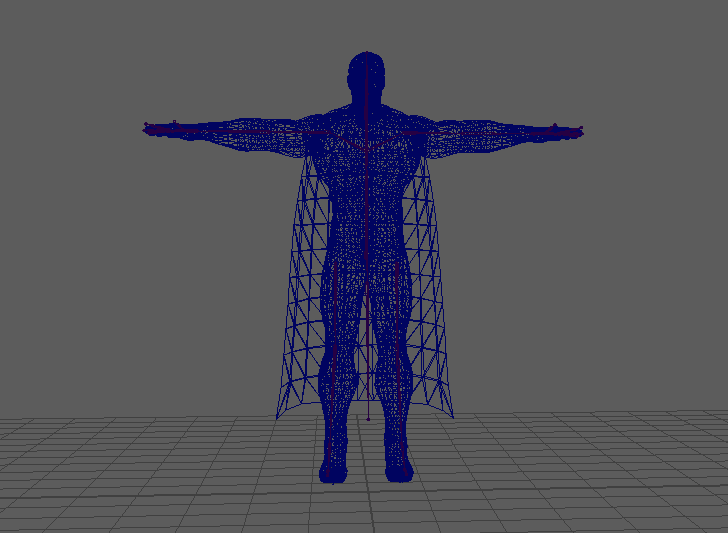
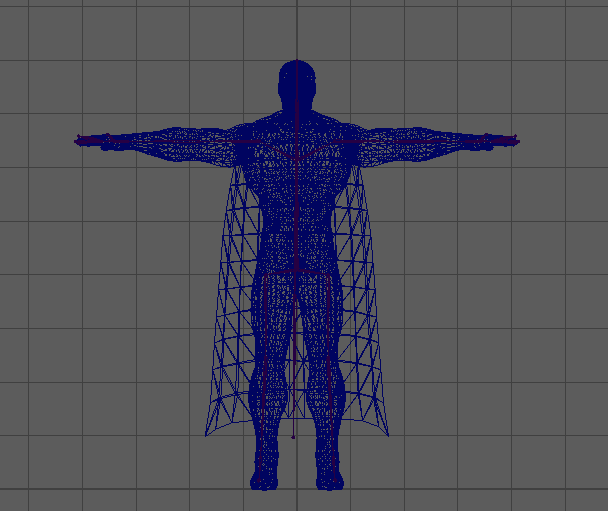
1 準備一個模型
2 創建骨骼
腿部骨骼
軀體骨骼
嘴巴骨骼
披風骨骼
手臂骨骼
手指骨骼
3 給骨骼命名
4 調整關節的坐標軸
測試
5 鏡像骨骼
貳 控制器
一 腳部控制 IK
1 腳部IK創建
腿部IK
腳掌IK
2 腳部IK打組
動作1:腳掌著地,抬腳后跟
動作2:抬前腳掌
動作3:腳尖著地,抬腳后跟
動作4:抬全腳掌
顯示IK控制柄
3 腳部控制器
注意點1:控制器的軸心點
注意點2 :控制器坐標清0
注意點3:刪除歷史記錄
建立層級關系
修改控制器顏色
4 創建另一個腳部控制器
二 手部控制 FK
手臂控制器FK
建立父子關系
手指控制 (略)
三 脊柱控制器 FK(略)
四 下顎(嘴部)控制器 IK
五 披風 FK(略)
六?全局控制器
叁 烘焙動畫和導出
一 整理通道欄
二? 蒙皮綁定、蒙皮權重
1 綁定骨骼和蒙皮
?? ?2 蒙皮權重
三 建立角色組
四?制作動畫
1 腳部 手部 姿勢
2 腰部動作
3 頭部動作
五?烘焙動畫到骨骼
1 烘焙動畫到骨骼
2 刪掉控制器
六?導出
壹 創建骨骼
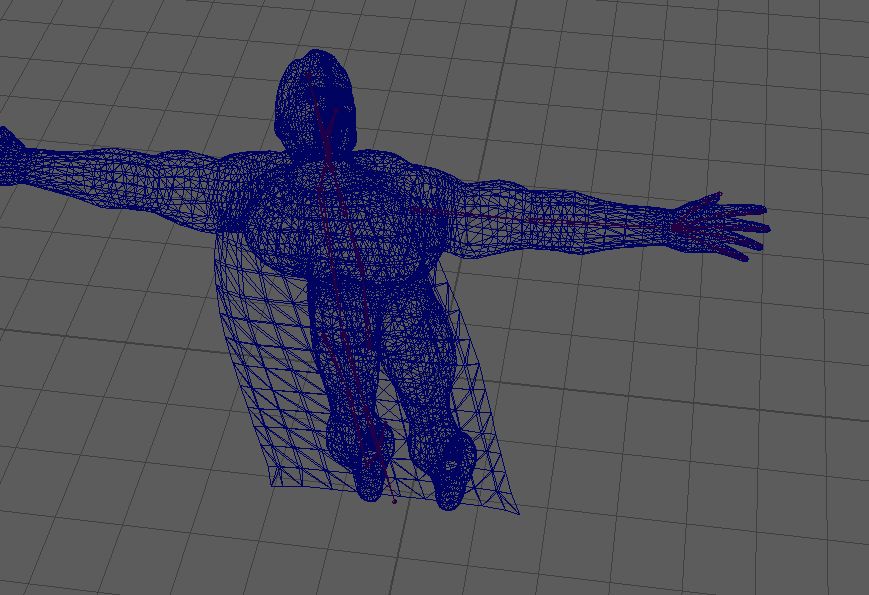
1 準備一個模型
2 創建骨骼
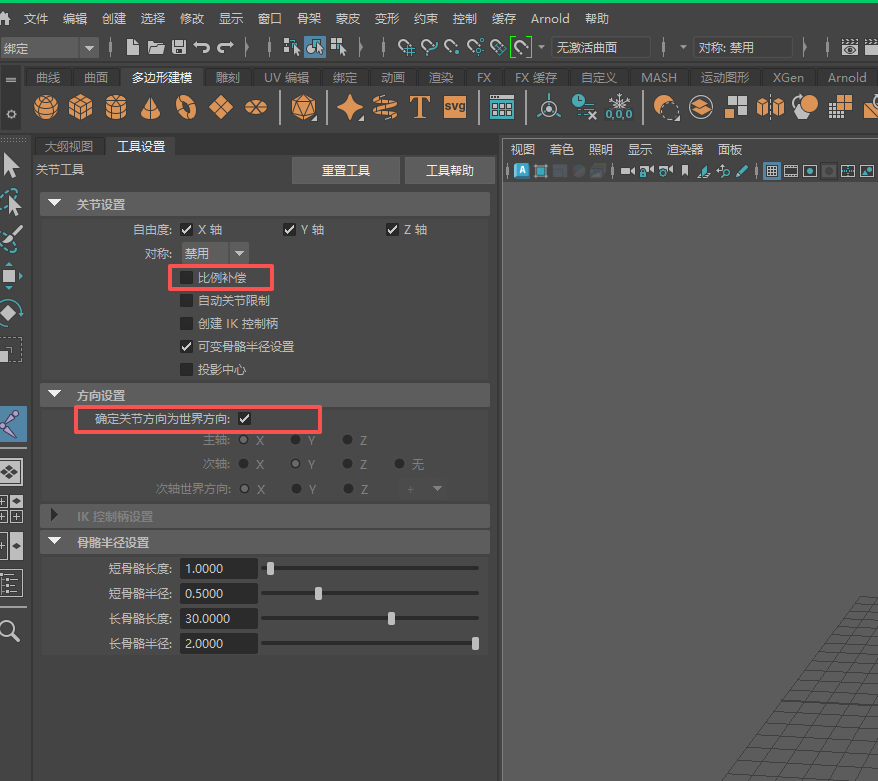
骨骼--創建關節? 的工具設置里,確保 取消勾選 比例補償,勾選世界方向
腿部骨骼
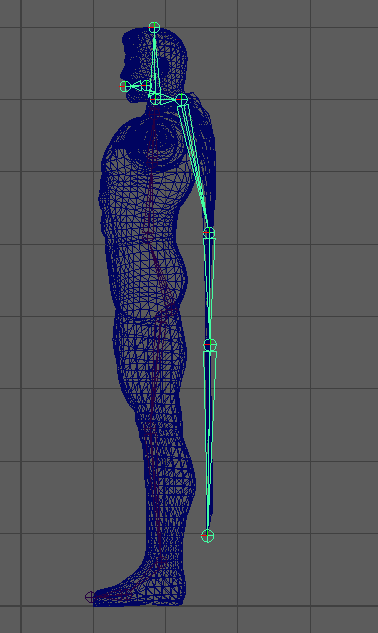
切換到側面,參考下面的圖創建骨骼:一共5個點
大腿、膝蓋、腳踝、前腳掌、腳尖(從上往下點)
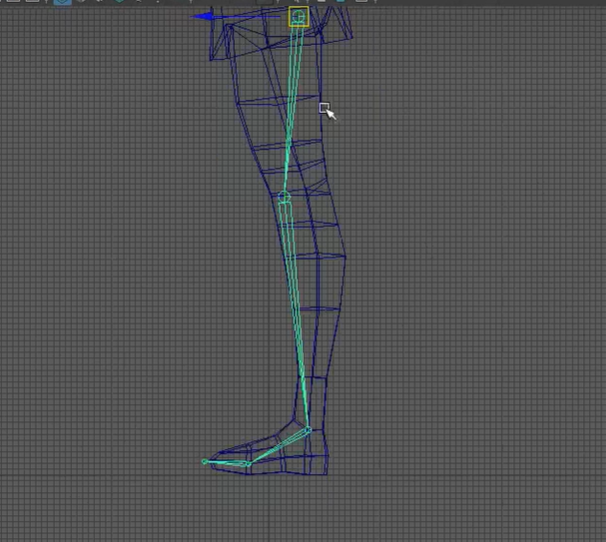
(調整骨骼的大小:顯示--動畫--關節大小)
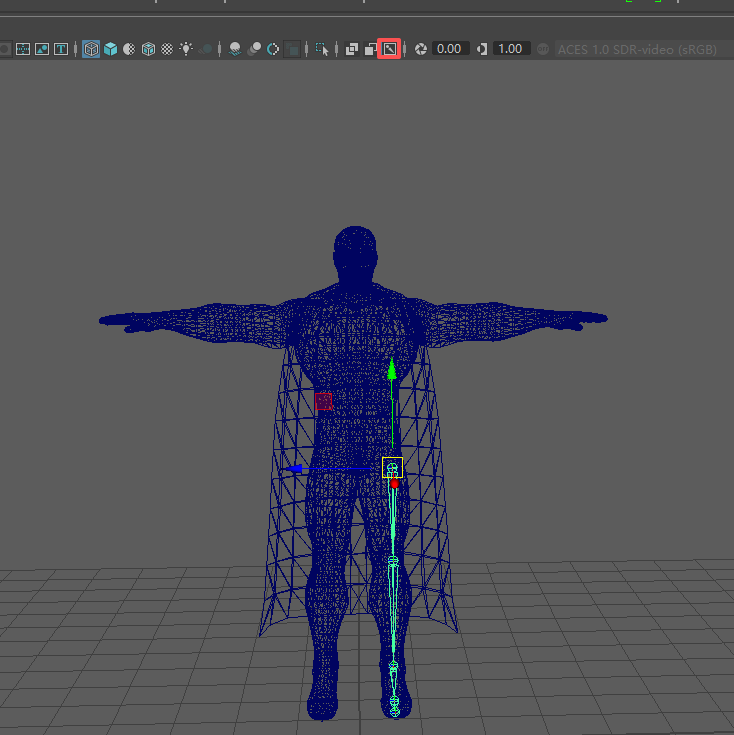
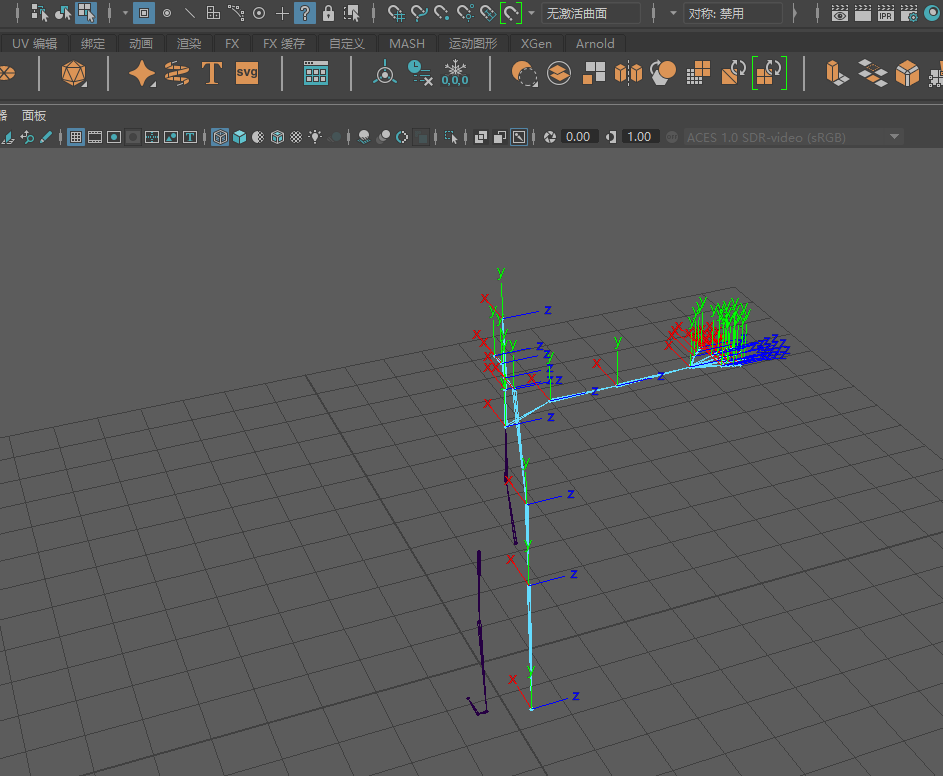
創建好了,切換到前面
把創建好的骨骼移到腿上面,打開X射線關節那個圖標
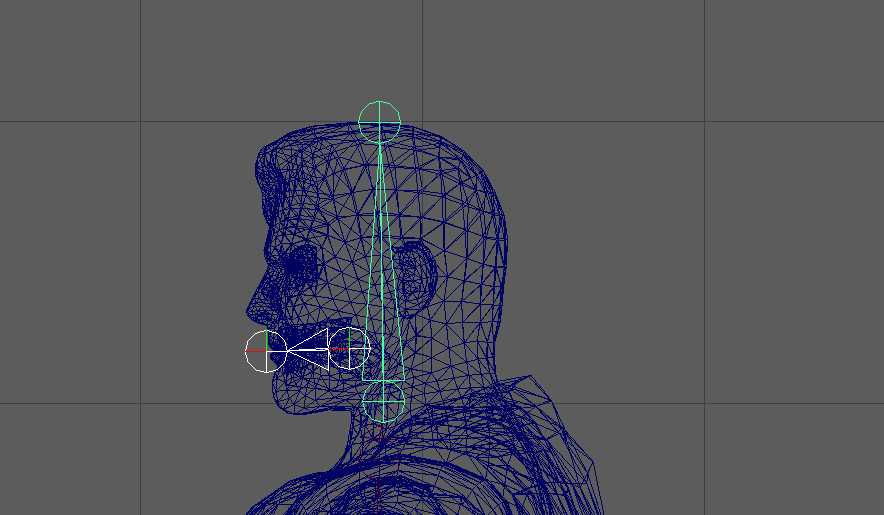
軀體骨骼
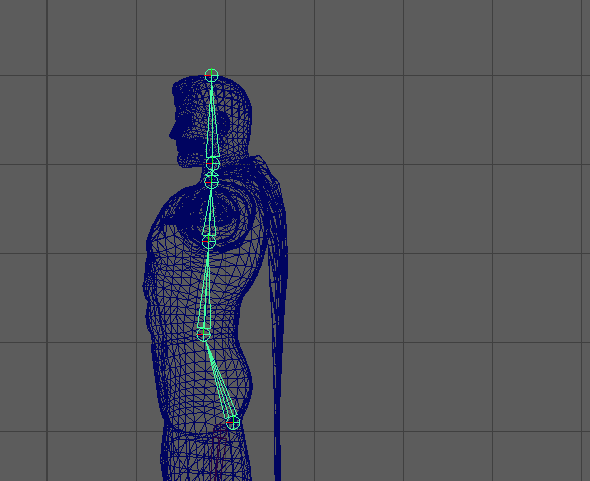
切換到側面,創建軀體骨骼,6個點:
腿、腰、胸、脖子下端、脖子上端、頭頂
(回車前? 按住D + 鼠標移動:移動骨骼一個關節位置)
、
嘴巴骨骼
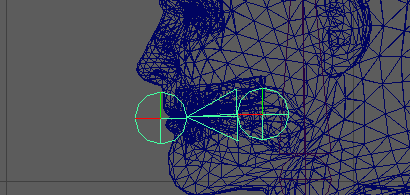
嘴巴骨骼連接軀體骨骼
選中兩段骨骼,按P
連接完了就是這樣
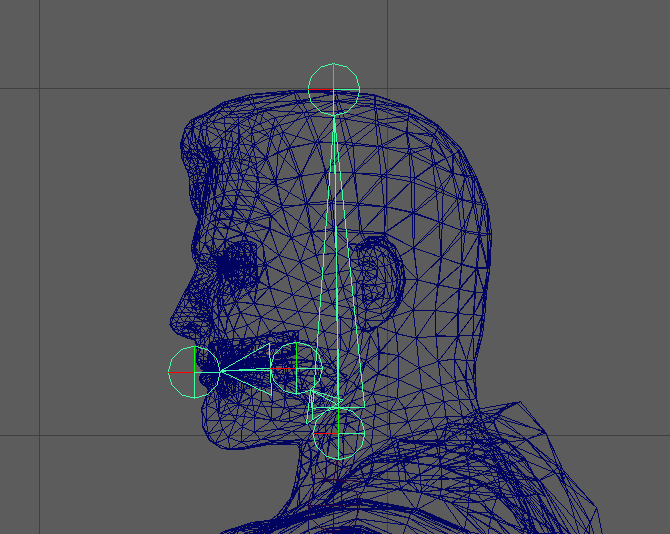
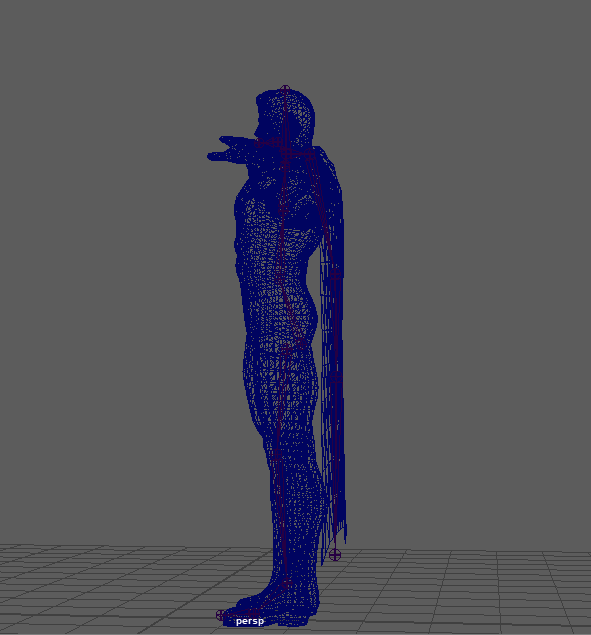
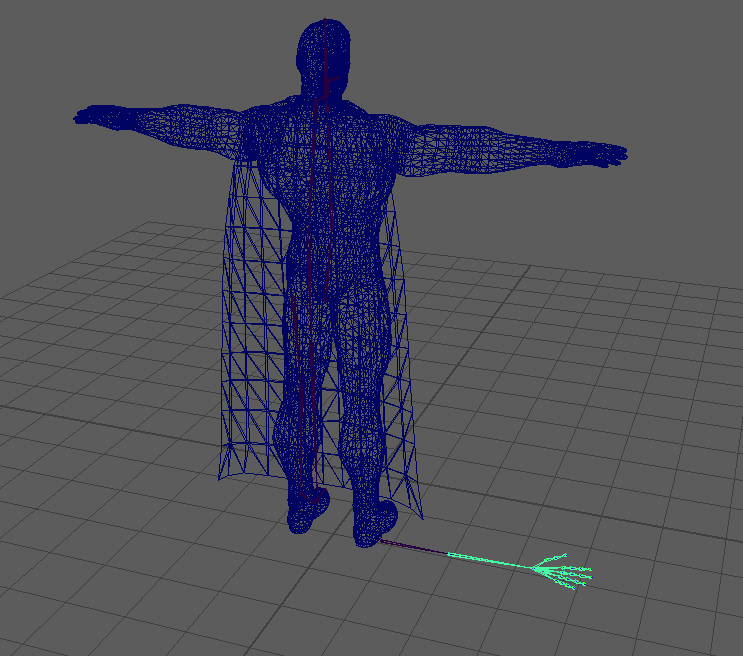
披風骨骼
也是連接到軀體(按P)
回到透視視圖,檢查下骨骼在不在身體和衣服上(不在的話,調整骨骼的位置)
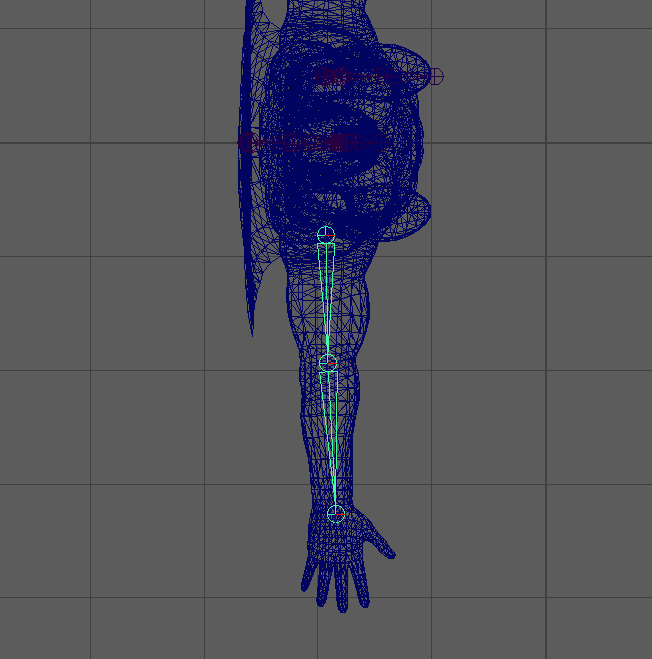
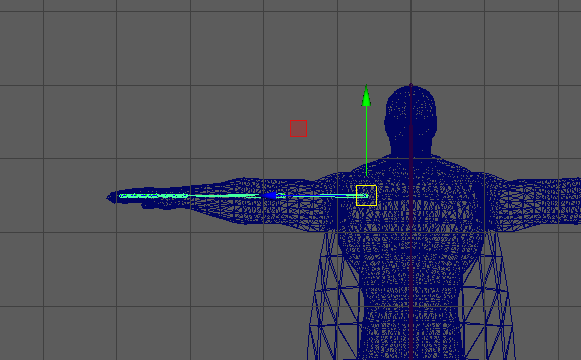
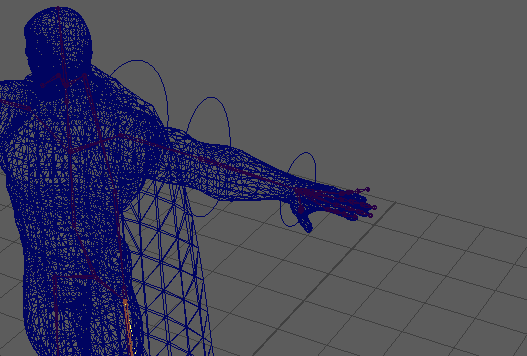
手臂骨骼
切換到頂視圖,創建手臂的骨骼
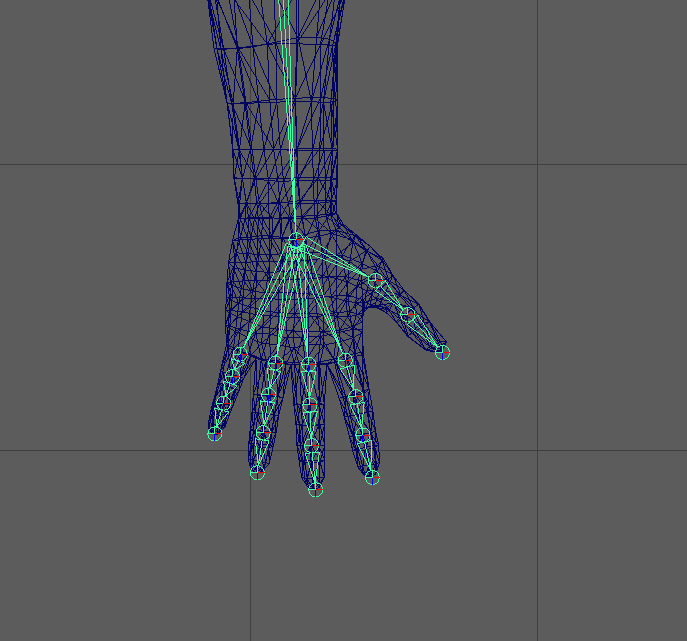
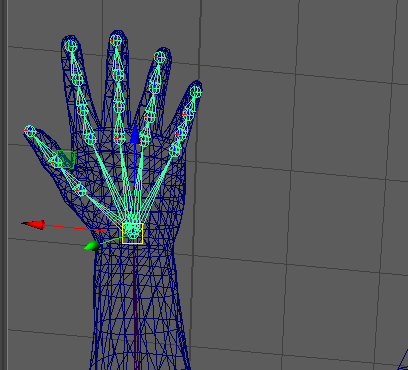
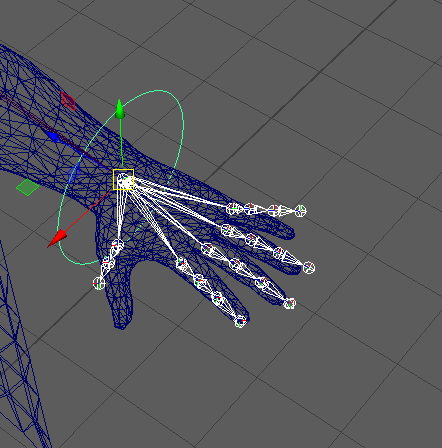
手指骨骼
大拇指3個節點,其他手指都4個節點
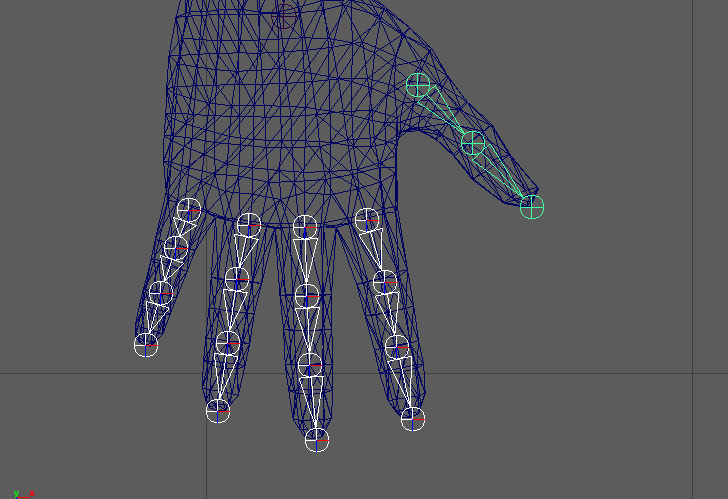
再把手指的骨骼連接到手腕上(選中5根手指的骨骼,選中手腕那個點,按P鍵)
切換到透視視圖
把手臂的骨骼移到胳膊上
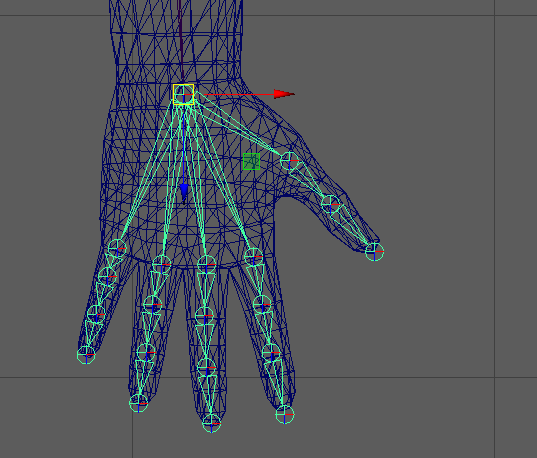
再切換到頂視圖
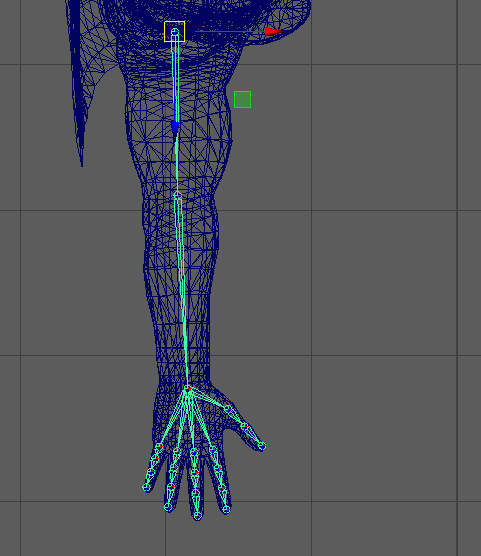
把手指頭沒對齊的微調一下位置
最后回到頂視圖把手指頭的位置再定一下
最后把手臂的骨骼和胸部的骨骼做一個連接
3 給骨骼命名
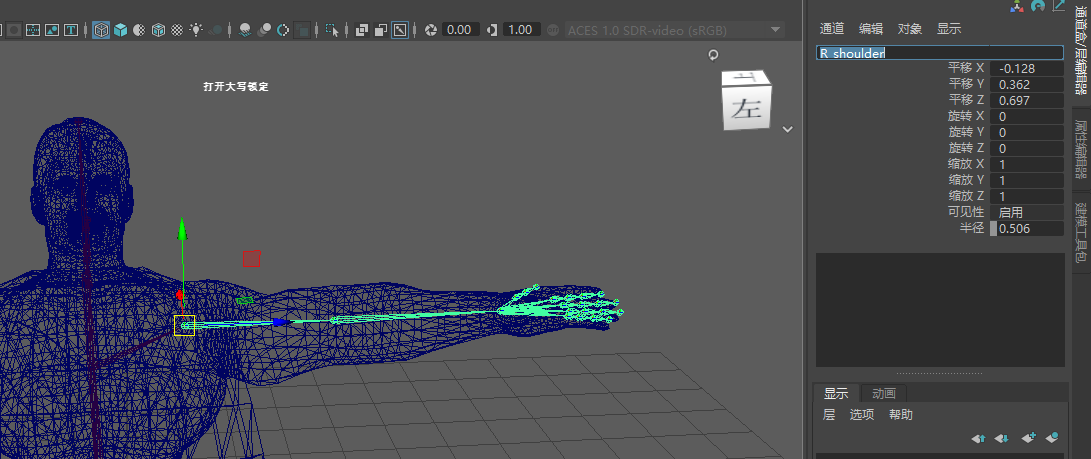
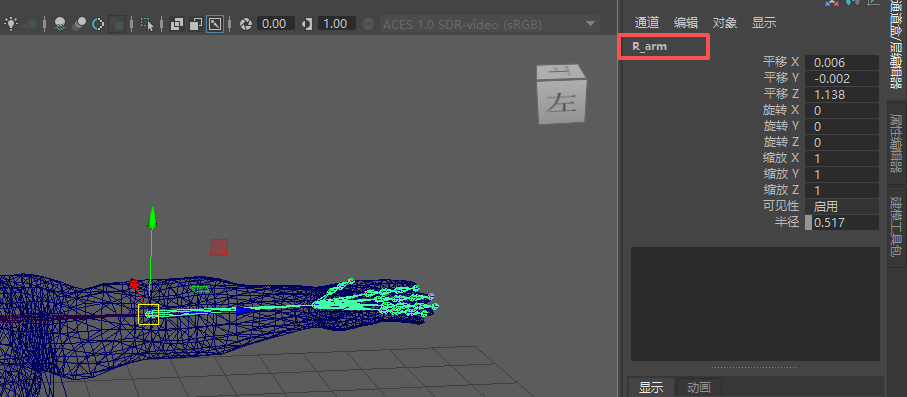
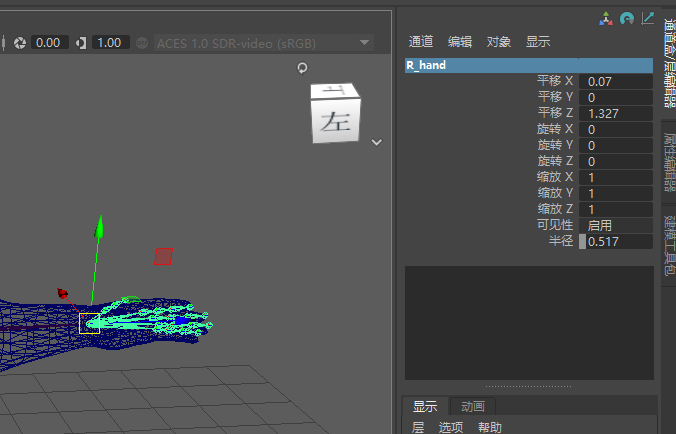
(為每一根骨骼命名)
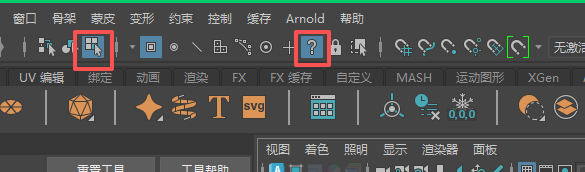
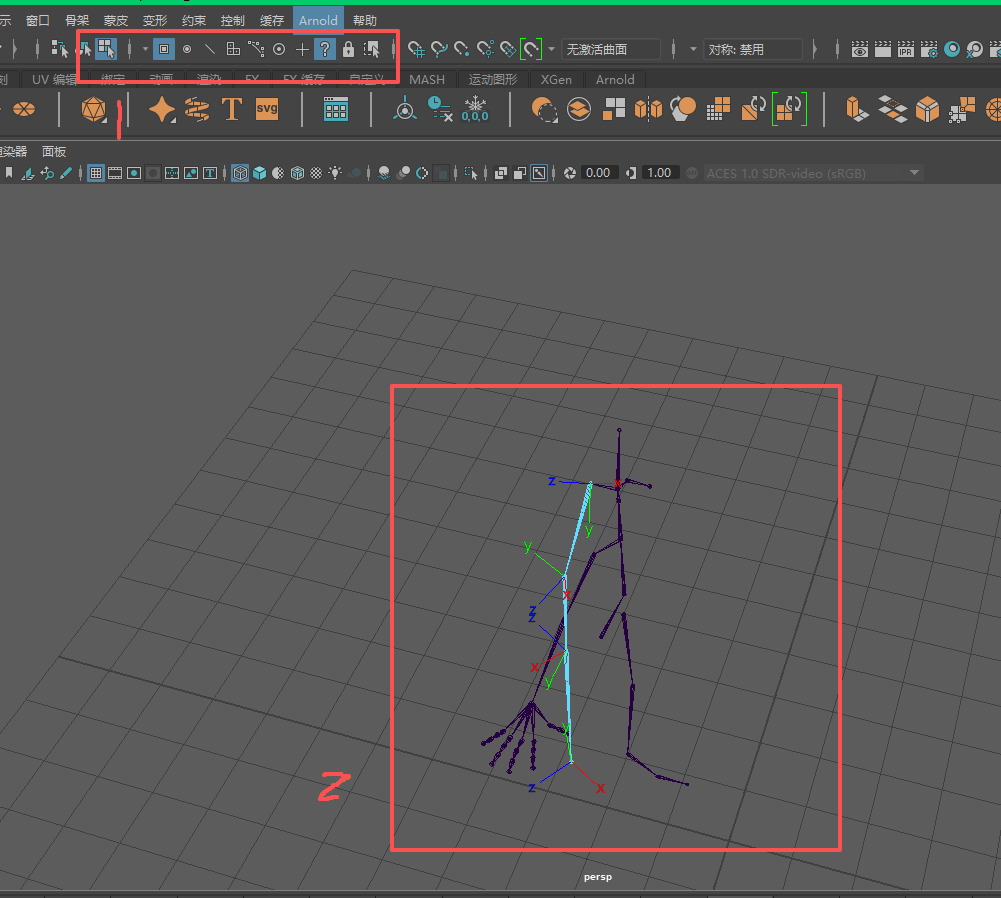
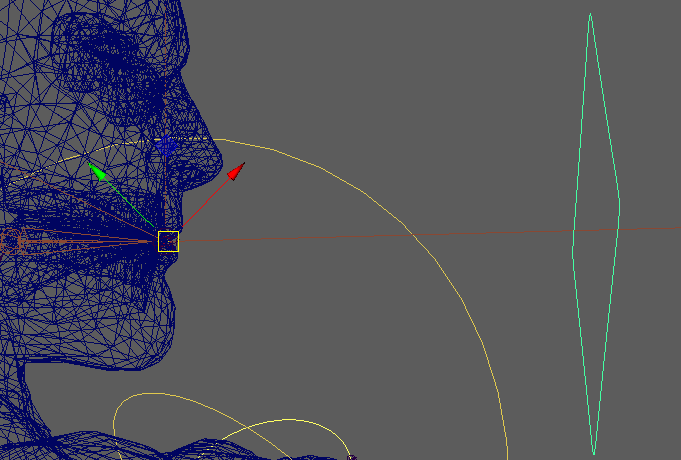
4 調整關節的坐標軸
顯示關節的坐標系:把菜單欄的這兩個按鈕打開
把身體關掉,只留骨骼:顯示--視口--取消勾選 多邊形
點旋轉 來修改關節坐標軸 (下面兩張圖是修改之前和修改之后)
測試
調好了之后,菜單欄切換回來,選擇一段骨骼旋轉來測試,看看這段骨骼的動作是否符合常規
再把剩下的骨骼關節坐標都調好
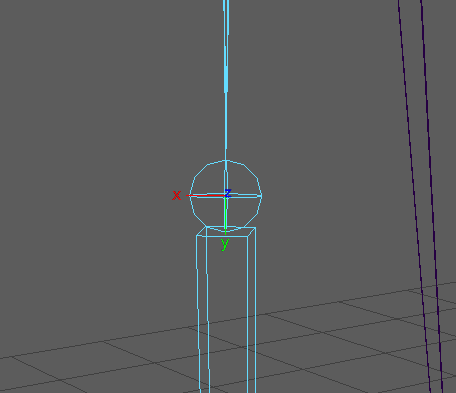
先在這個視圖下選中一段骨骼
再切換按鈕到下面圖這樣,就會出現小坐標軸了
旋轉,對好坐標軸
5 鏡像骨骼
顯示--視口--勾選 多邊形,讓模型顯示出來
按對象類型選擇
取消勾選? 選擇曲面對象(這樣就只能選到骨骼)
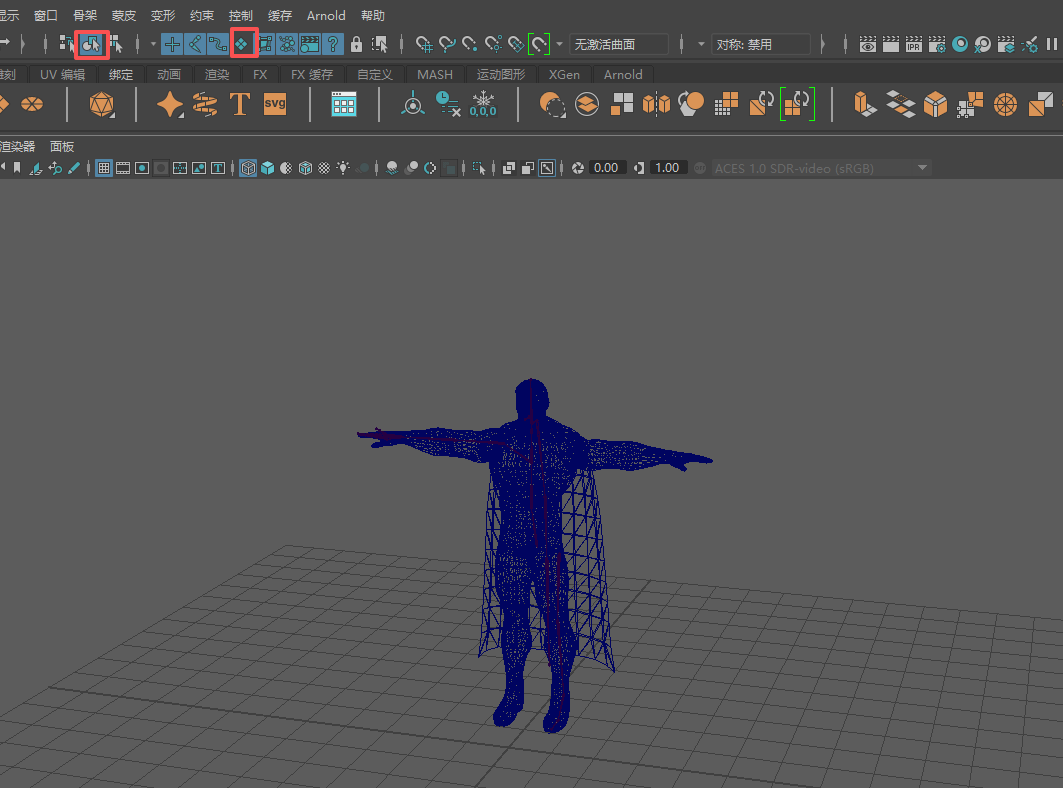
選中手部的骨骼
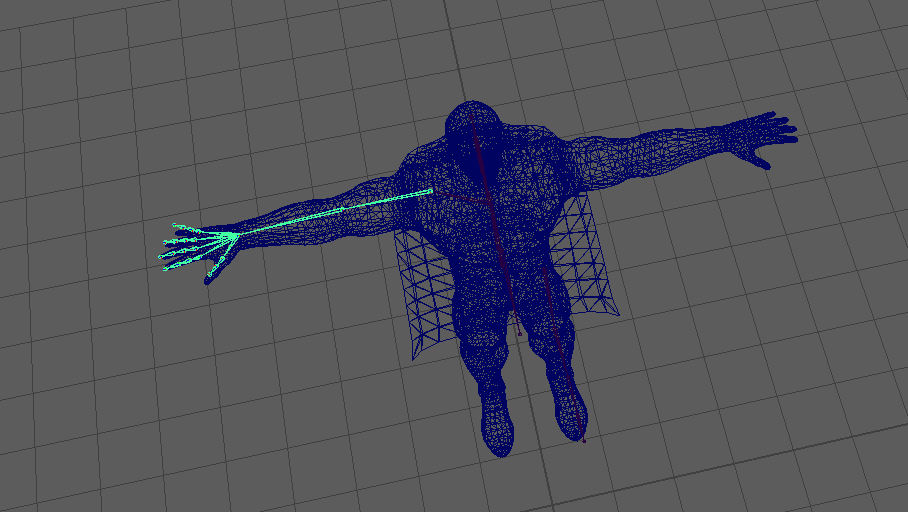
菜單欄--骨架--鏡像關節? 選項
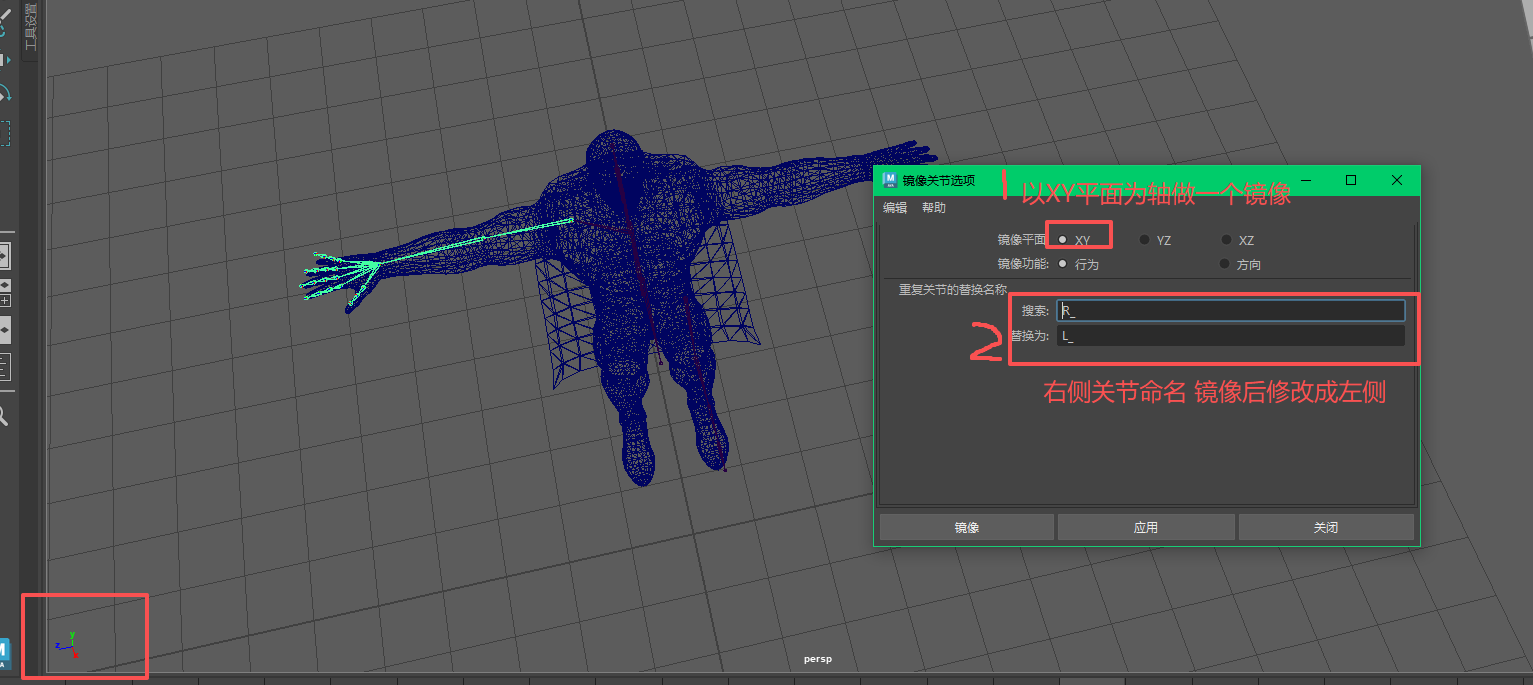
應用? 關閉,就鏡像好了
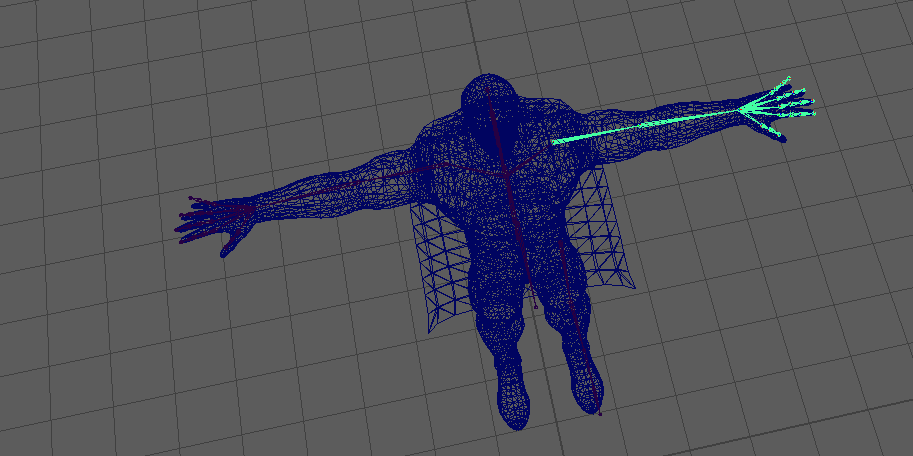
同樣的操作,把腿部骨骼也鏡像一下
腿的骨骼連接到軀干上(同時選中兩段骨骼,按P)
貳 控制器
一 腳部控制 IK
1 腳部IK創建
腿部IK
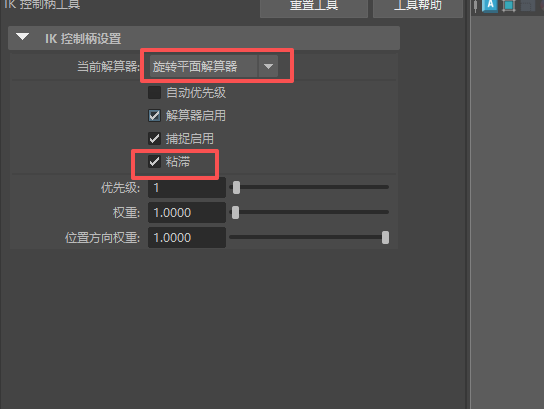
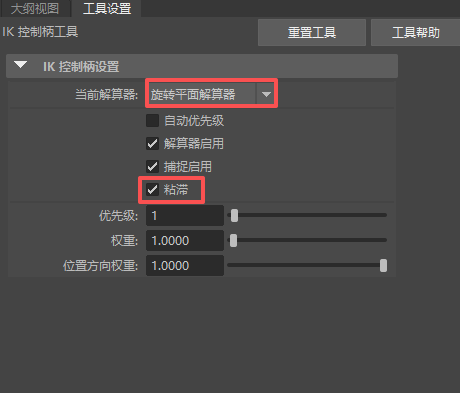
骨架--創建IK控制柄 工具設置
選 旋轉平面解算器,勾選 粘滯
腳掌IK
腳掌IK用單鏈解算器 , 同樣 粘滯
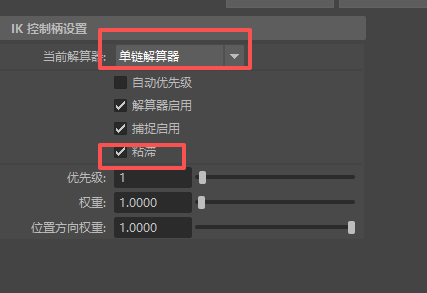
再創建一個IK
IK控制柄大小可以調整:
?? ?顯示--動畫--IK控制柄大小 (只是為了方便觀察)
2 腳部IK打組
接下來要給腳部IK打4個組
首先說一下為什么要打組,打不同的組是為了分別對腳部做出四種控制動作
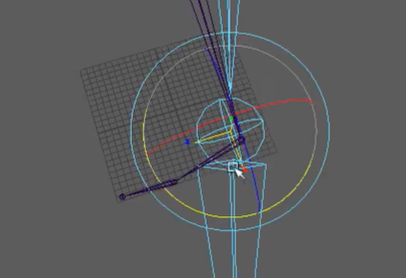
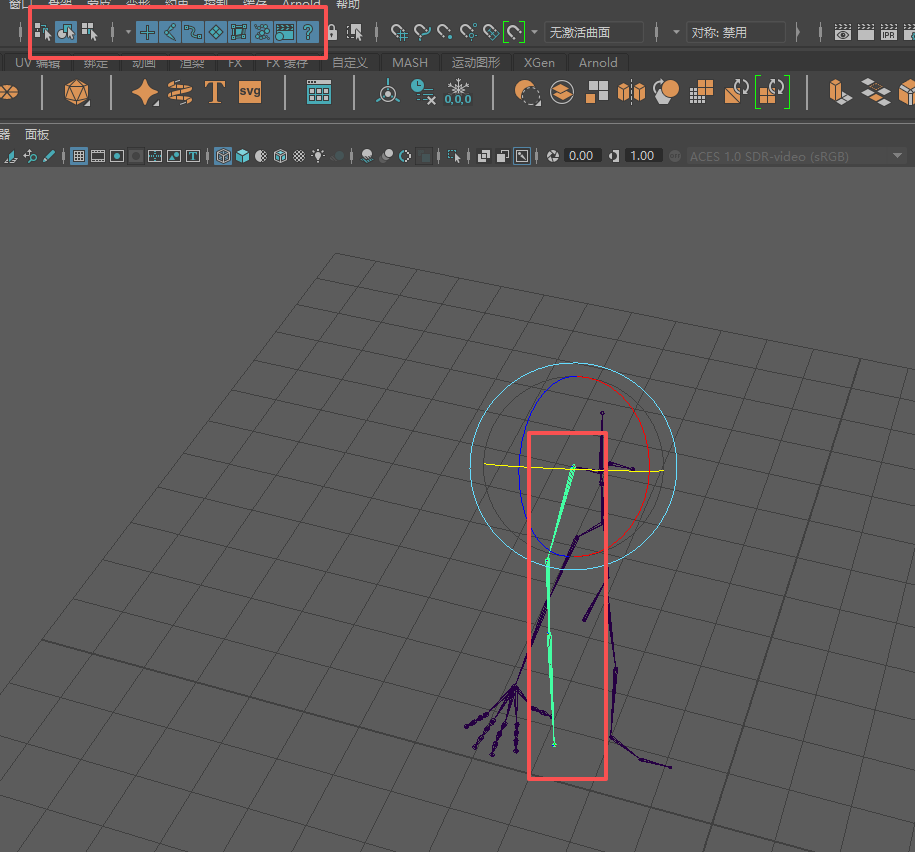
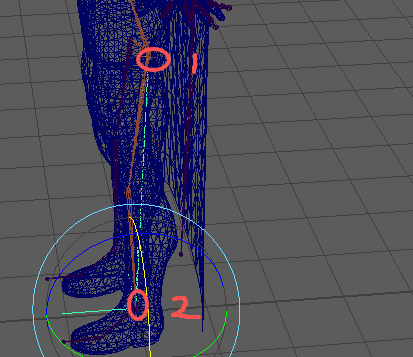
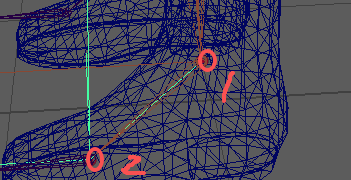
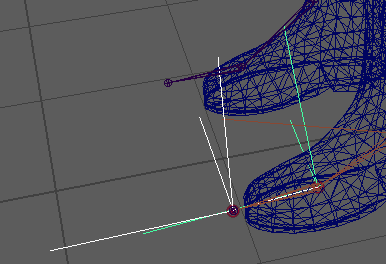
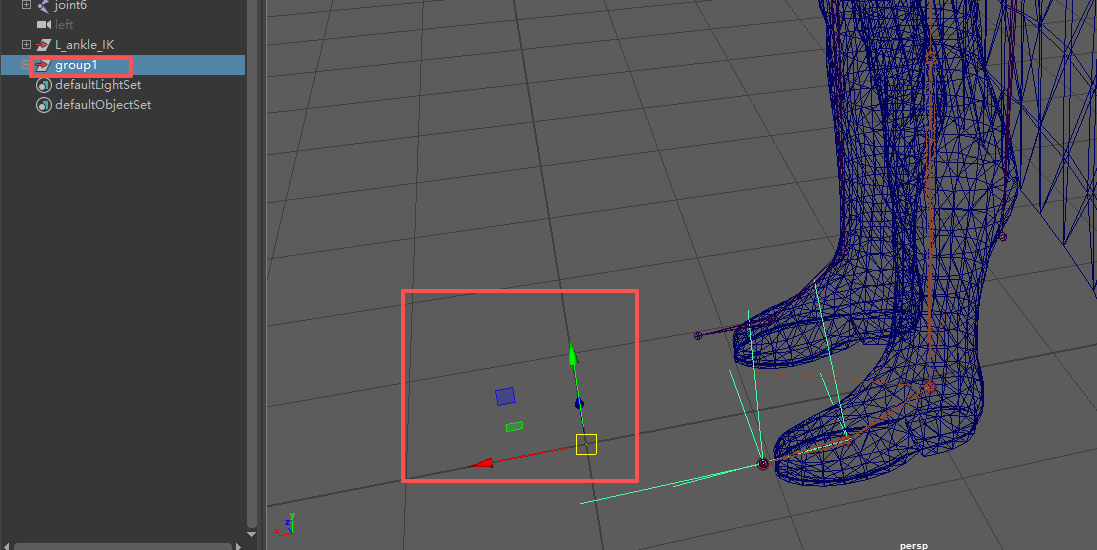
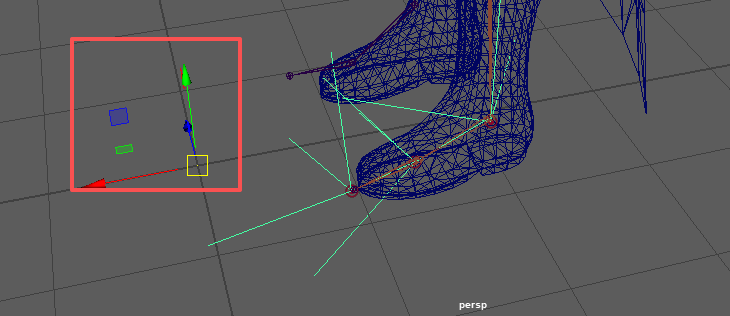
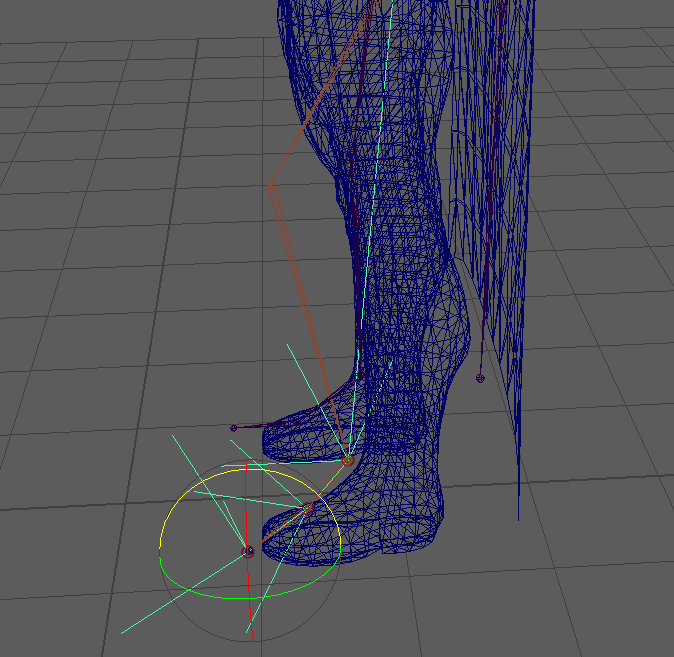
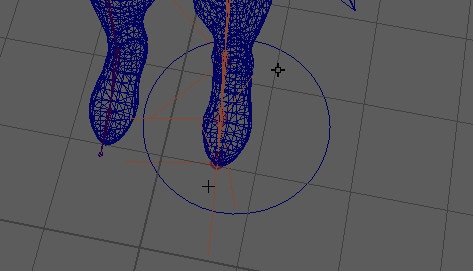
動作1:腳掌著地,抬腳后跟
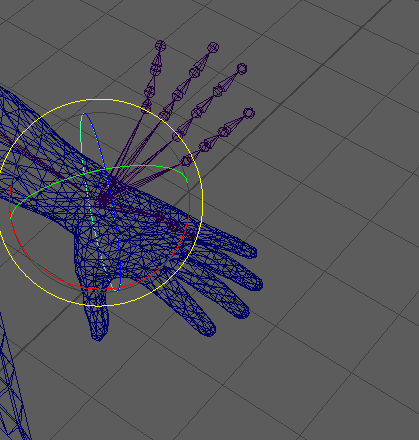
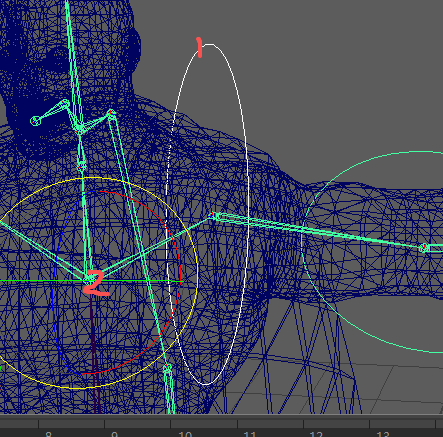
選中腿部的那個IK
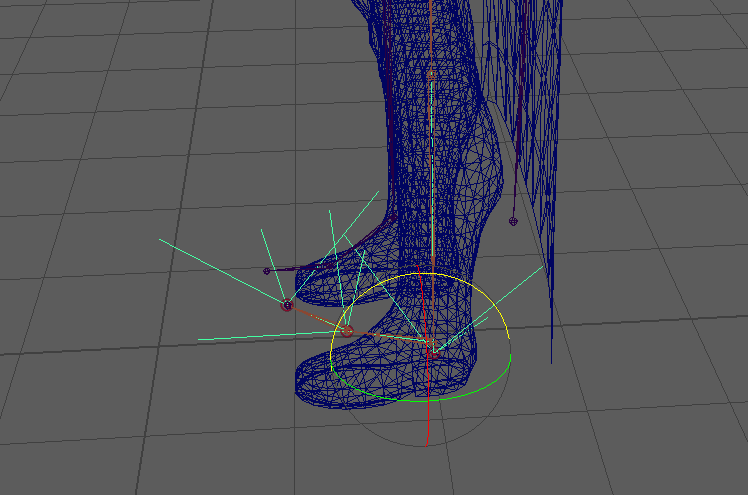
ctrl + G, 打一個組,按W會出來一個小坐標(下圖紅框中)
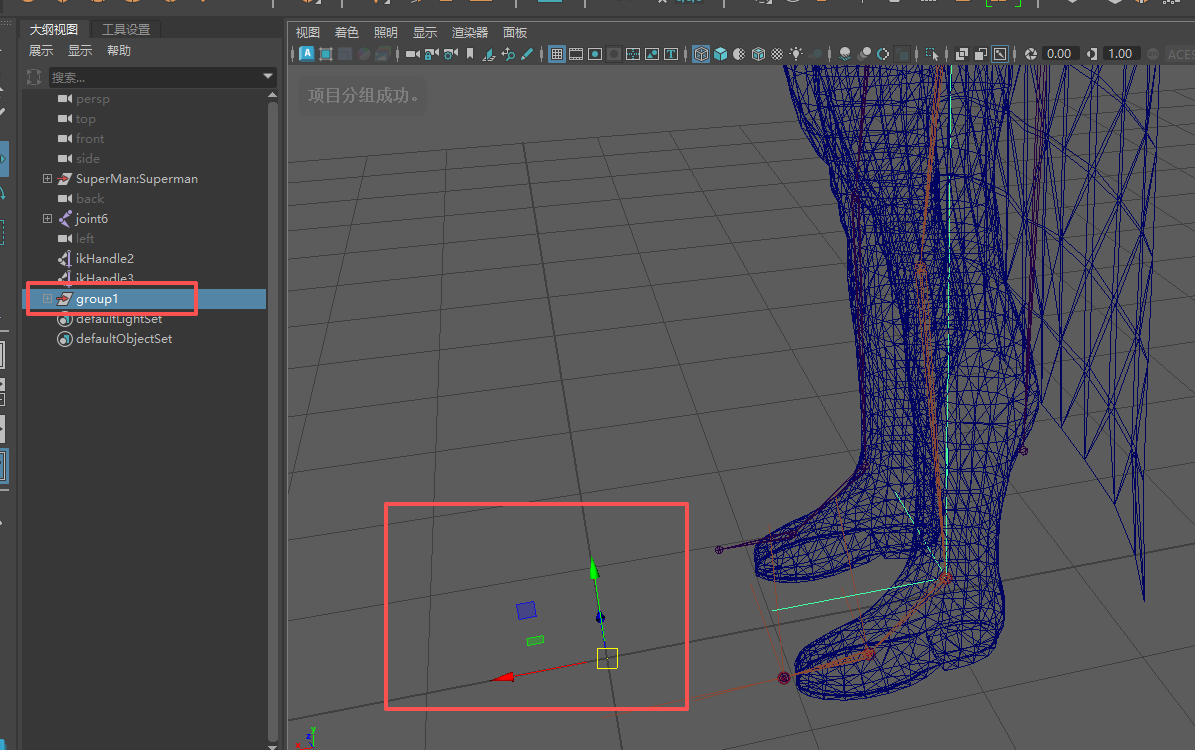
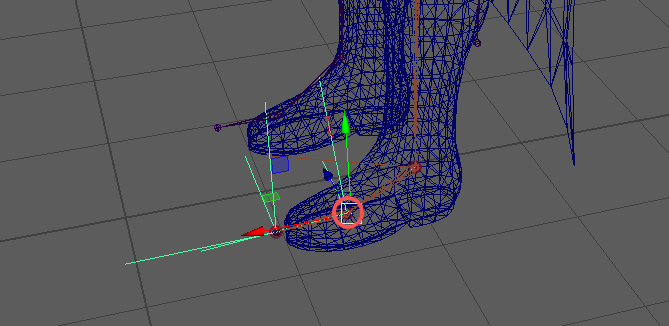
鍵盤上同時按住 D鍵和V鍵,鍵盤按住的同時,鼠標拖動剛才的小坐標到下圖的圓圈處,松開鼠標
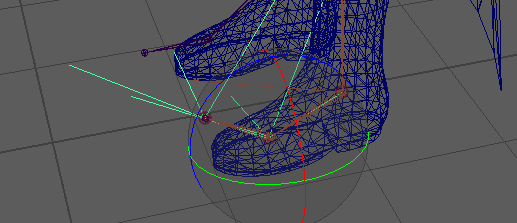
旋轉 剛才的小坐標,就會發現腿部的骨骼會跟著這個坐標動,像 腳掌著地 抬腳后跟 的動作
修改剛剛的組名
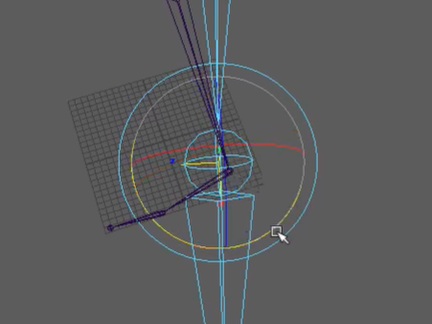
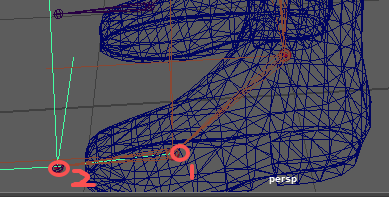
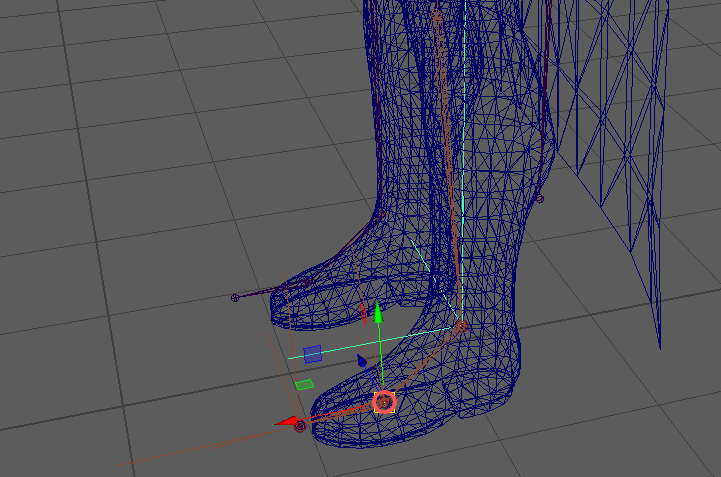
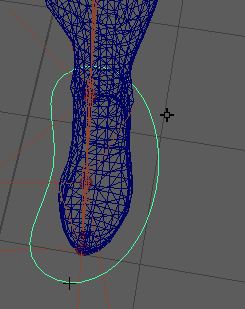
動作2:抬前腳掌
選中腳掌的這2個IK
ctrl + G打組,按W鍵,又出現一個小坐標
同樣,鍵盤上同時按住 D鍵和V鍵,鍵盤按住的同時,鼠標拖動小坐標到 足底的中間關節處,松開鼠標
旋轉剛剛的小坐標,就會發現前腳掌可以動了
修改名字
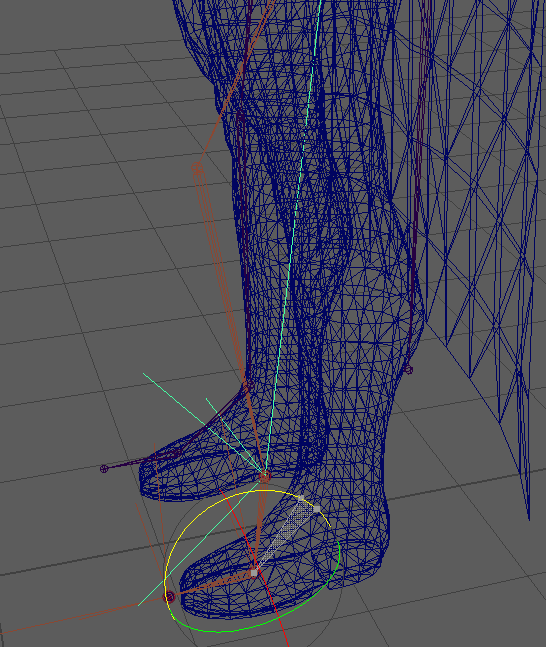
動作3:腳尖著地,抬腳后跟
選中剛才的兩個組,ctrl + G 再打一個組
按W
鍵盤上同時按住 D鍵和V鍵,鍵盤按住的同時,鼠標拖動剛才的小坐標到腳尖的關節處,松開鼠標
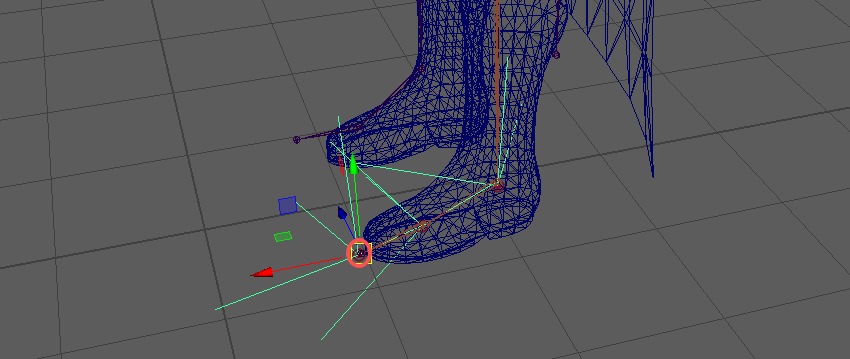
旋轉剛才的坐標軸就會出現這樣? 腳尖著地,抬腳后跟 的動作
修改IK手柄組的名字
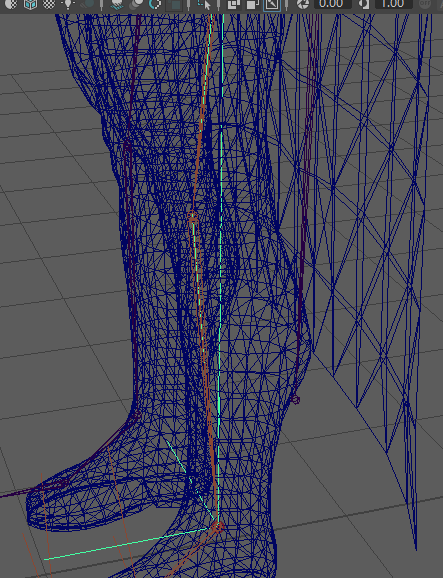
動作4:抬全腳掌
選中剛剛的那個組,ctrl + G 再打一個組
按W出現小坐標軸,鍵盤上同時按住 D鍵和V鍵,鍵盤按住的同時,鼠標拖動 小坐標軸 到 腳踝 關節處,松開鼠標
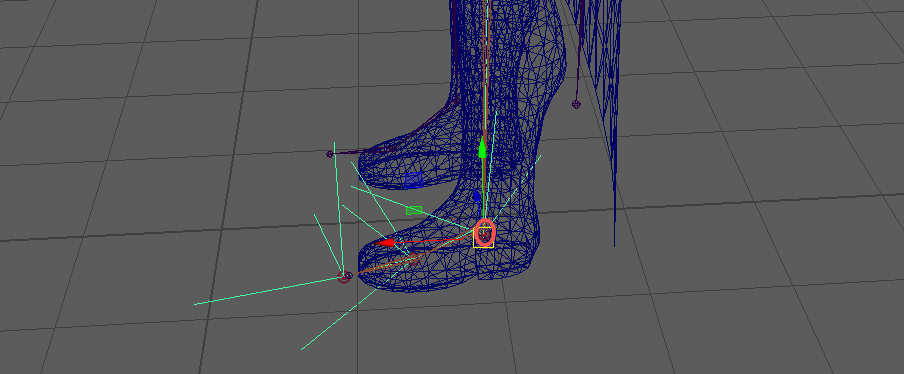
旋轉剛才的小坐標軸,可以出現 抬整個腳掌的動作
修改組名字
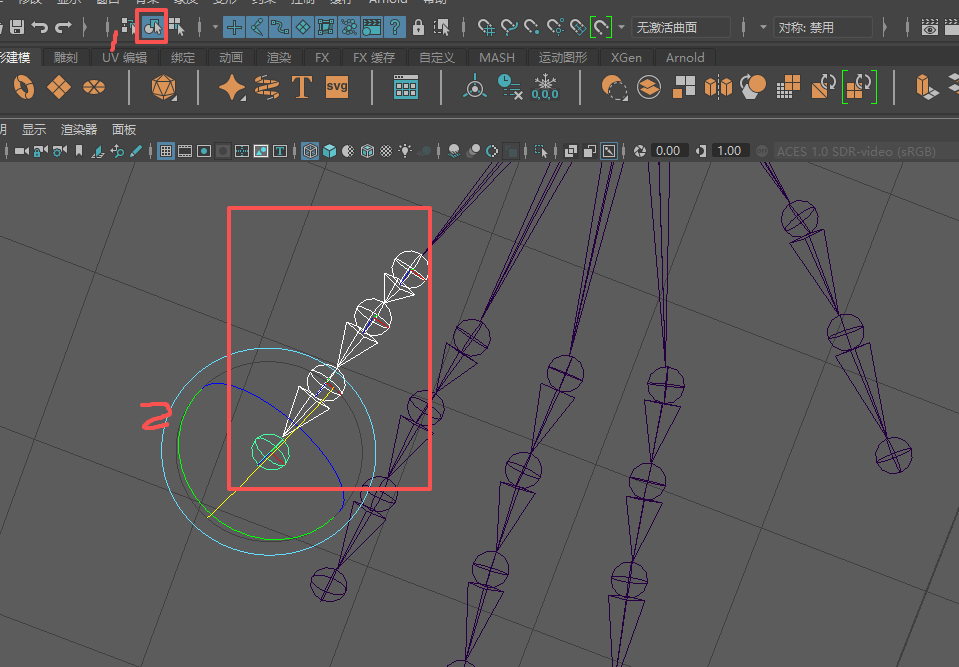
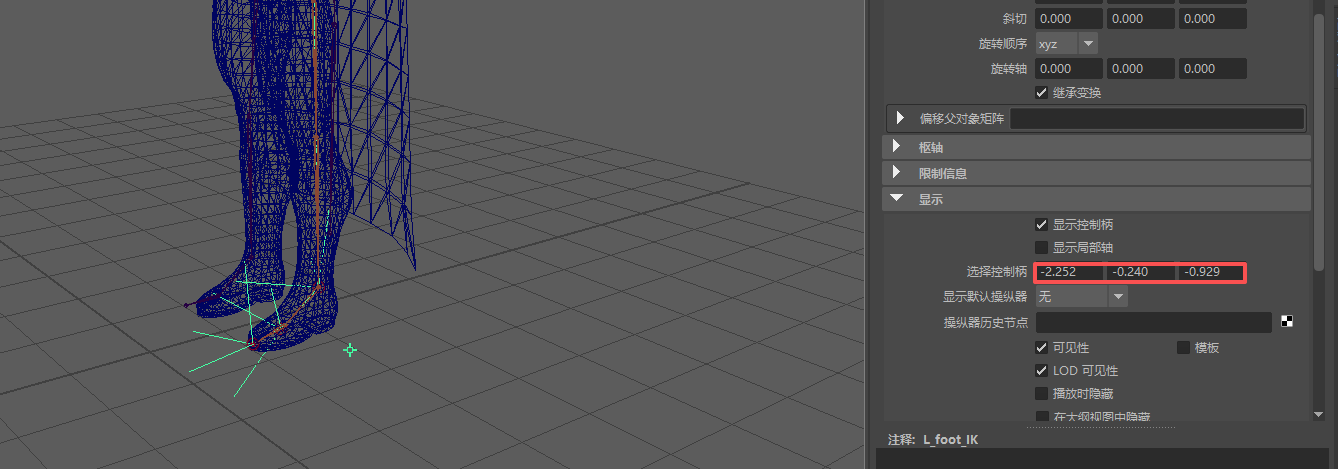
顯示IK控制柄
(IK控制柄顯示后,選擇 控制柄 就相當于選擇 大綱視圖的 IK組了,相當于控制器)
選中IK組,ctrl + A 顯示屬性編輯器,顯示里,勾選 顯示控制柄
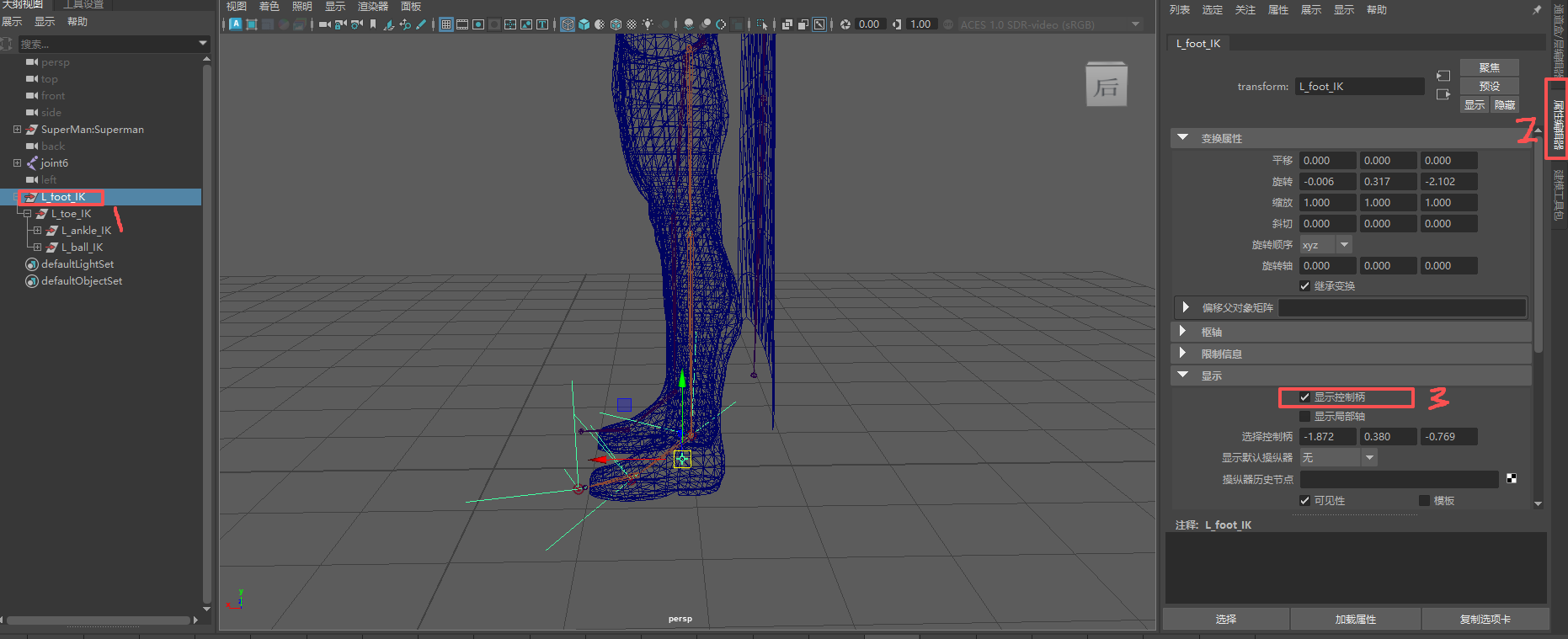
這個就是控制柄
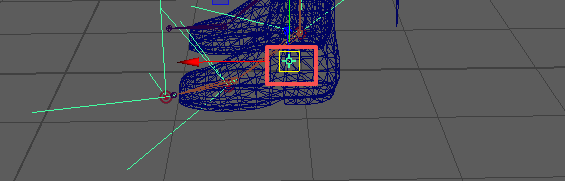
按住ctrl,鼠標放在 顯示 下面 選擇控制柄 框里,?左鍵拖動,可以改變控制柄的位置
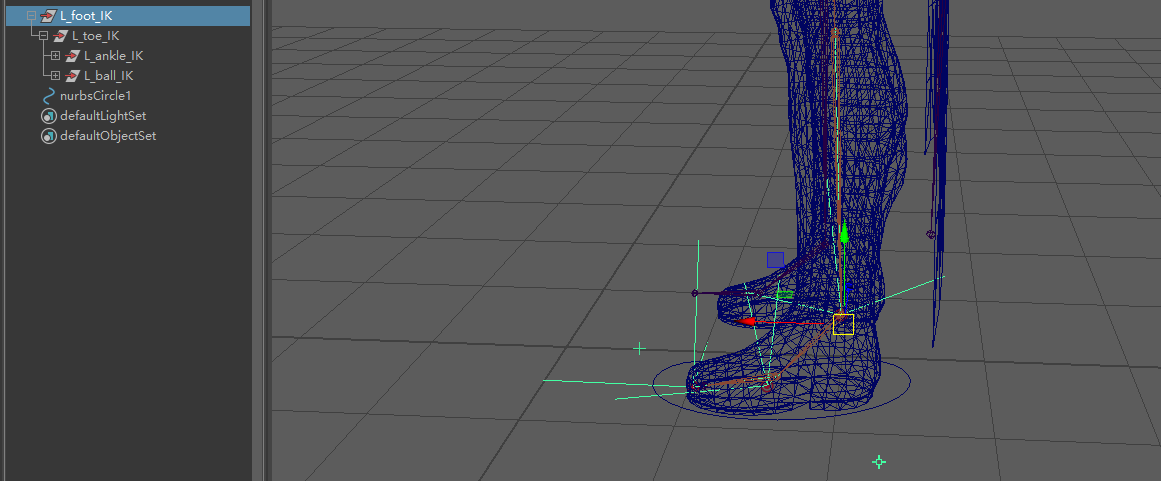
3 腳部控制器
(簡單的可以 不用 控制器,用顯示的IK控制柄就行)
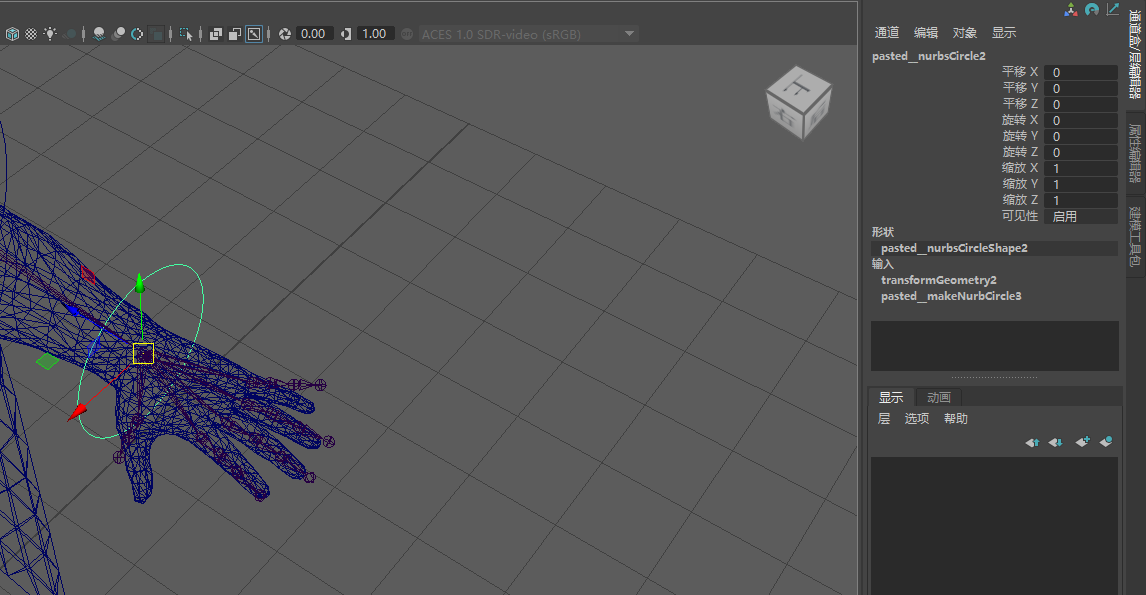
很多東西都可以用來做控制器,這里用圓形來做 控制器
?? ?
創建--NURBS基本體--圓形
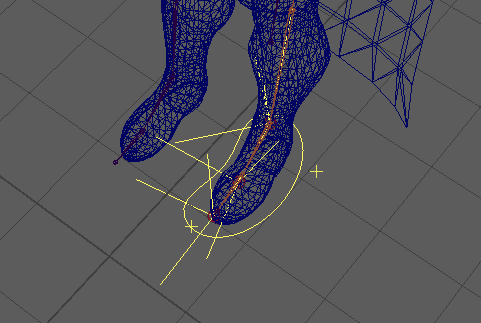
修改圓形形狀
切換到 控制頂點,修改圓形形狀為腳丫子形狀(W)
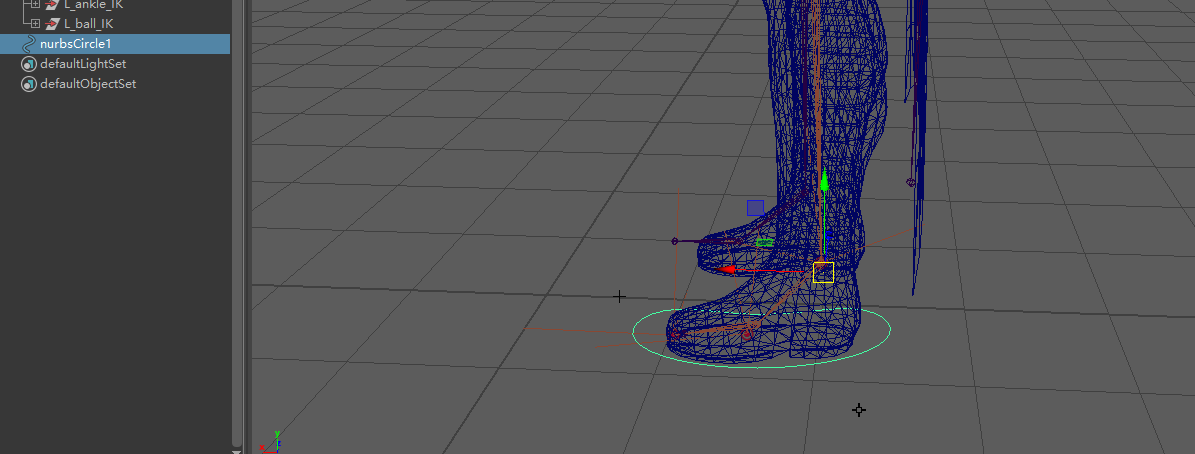
注意點1:控制器的軸心點
控制器的軸心點和 被控制東西 L_foot_IK的軸心點 對齊?
(同時按住 D鍵和V鍵,且鼠標拖動圓形的軸心點 到 目標位置)
注意點2 :控制器坐標清0
即 修改--凍結變換?
清0之前
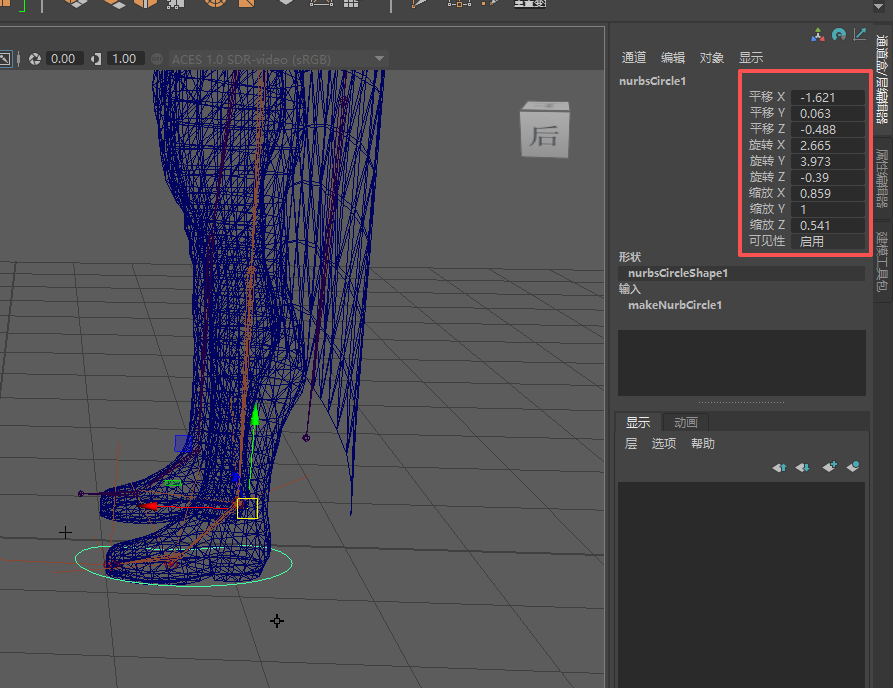
修改--凍結變換? 之后:
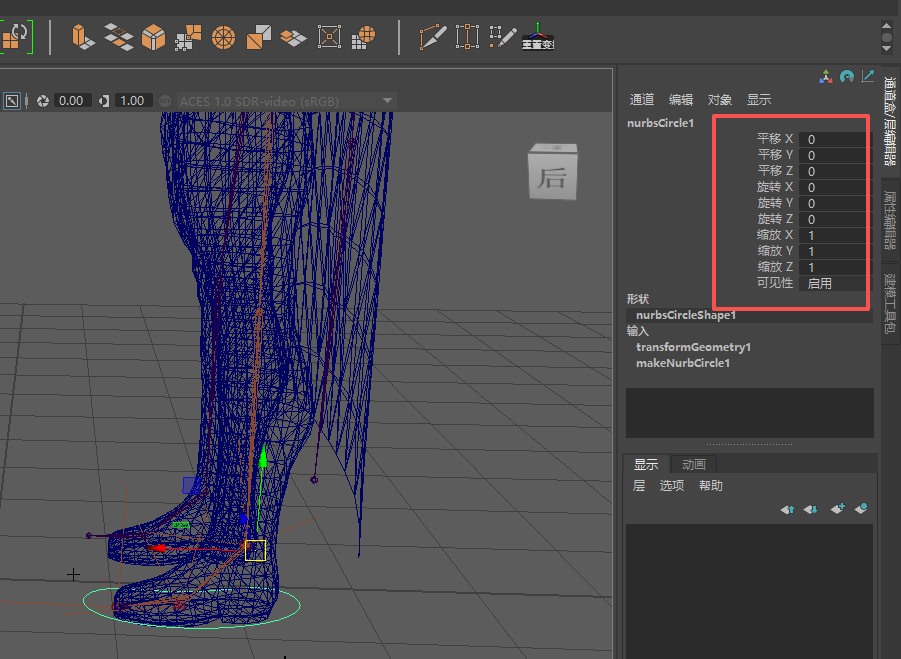
目的:?方便控制器歸位
注意點3:刪除歷史記錄
編輯--按類型刪除--歷史
(防止當前的歷史 參與以后的動畫運算)
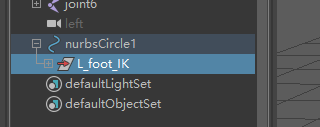
建立層級關系
先選IK組,按住shift,再選控制器,按P
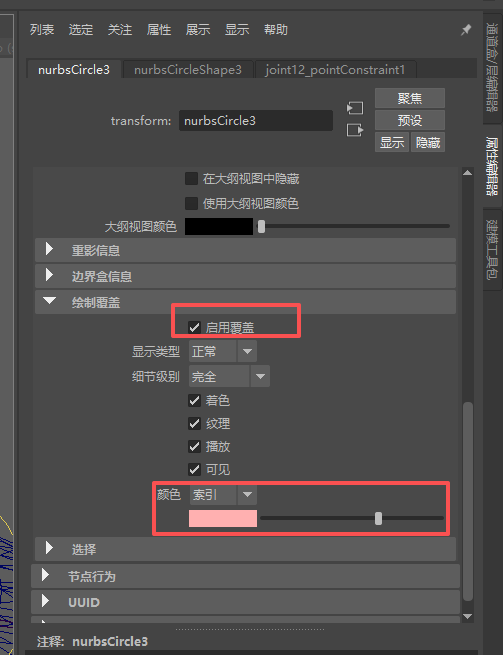
修改控制器顏色
ctrl + A:屬性編輯器 -- 顯示 -- 繪制覆蓋 -- 勾選 啟用覆蓋-- 選一個顏色
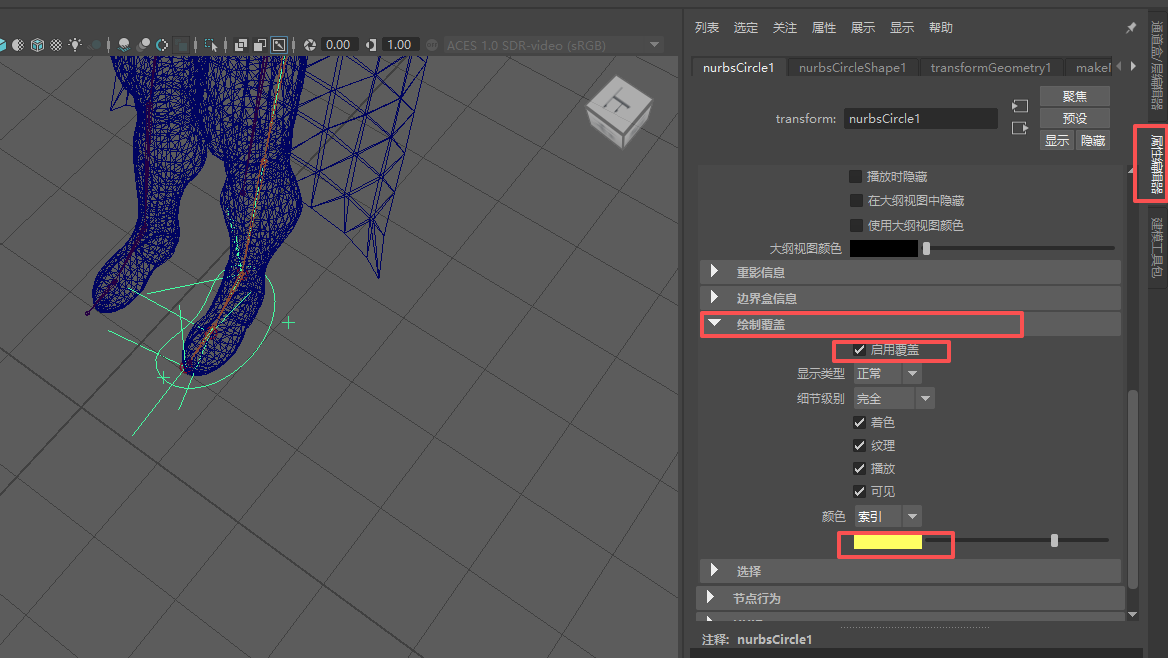
控制器變成黃色了
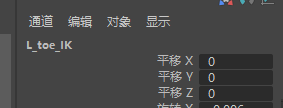
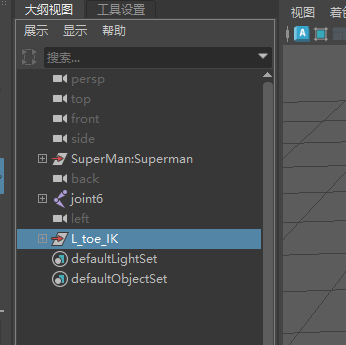
4 創建另一個腳部控制器
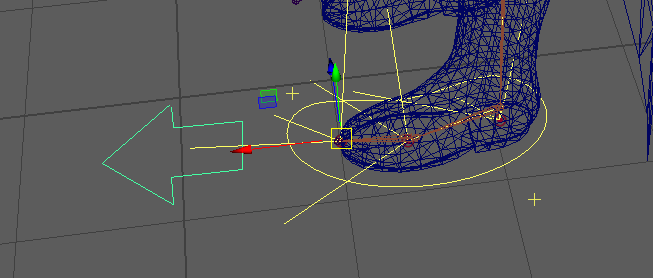
用EP曲線做一個控制器:(控制 L_toe_IK)
????????創建--曲線工具--ep曲線 (工具設置--曲線次數:1線性 畫出來的是直線)
按住X畫
修改--使樞軸居中
步驟1 控制器的軸心點和 被控制東西 的軸心點 對齊 (鍵盤上同時按住 D鍵和V鍵 + 鼠標拖動)
步驟2 修改--凍結變換 (控制器坐標 清0) ?→ 方便控制器歸位
步驟3 編輯--按類型刪除--歷史 ?(防止當前的歷史 參與以后的動畫運算)
?
步驟4??先選控制器,再選 L_toe_IK,約束--方向約束,添加
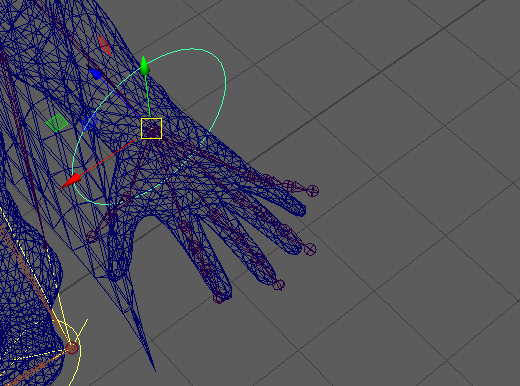
二 手部控制 FK
手臂控制器FK
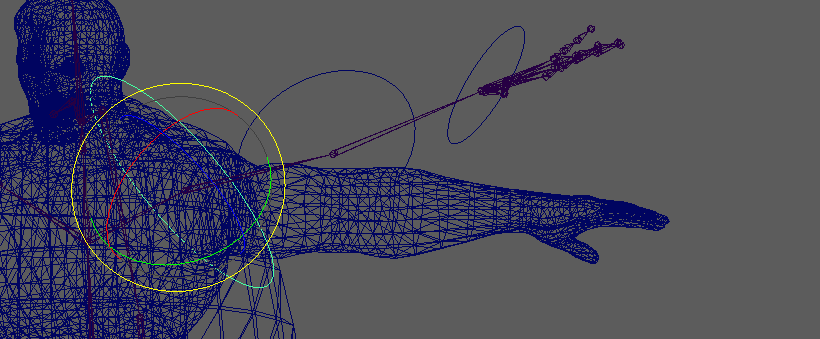
創建一個圓形,ctrl + G 給圓環打一個組

把圓環旋轉90度,放在垂直于手臂的位置
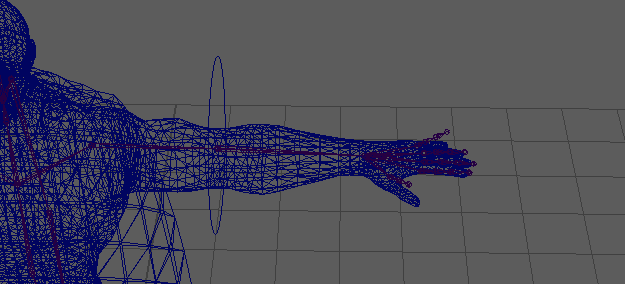
再復制2個圓環,放在合適的位置
按V鍵同時拖動鼠標,把3個圓環的中心點和關節點對齊
把圓環凍結變換?
先選骨骼,再選圓環
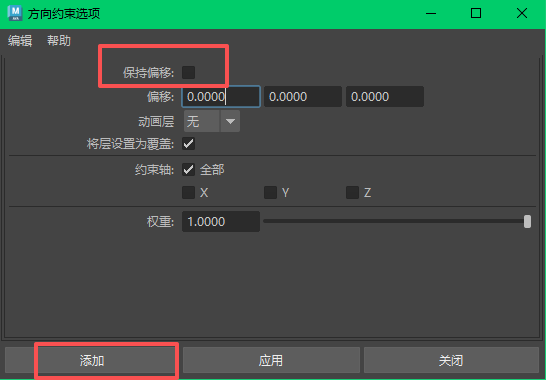
約束--方向 選項,取消勾選 保持偏移 , 添加
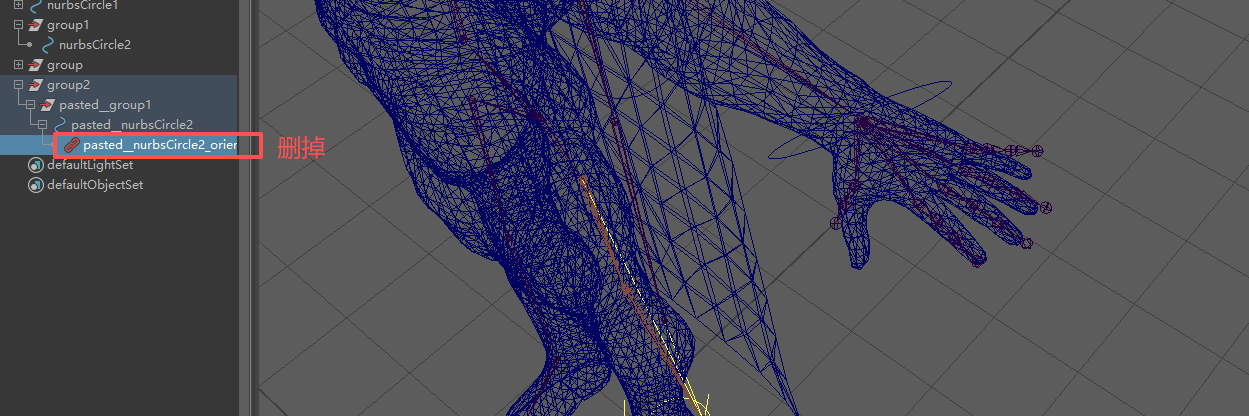
再把約束刪除 (做這個約束就是為了把圓環和手臂關節對齊方向)
先選圓環,再選骨骼,約束--方向
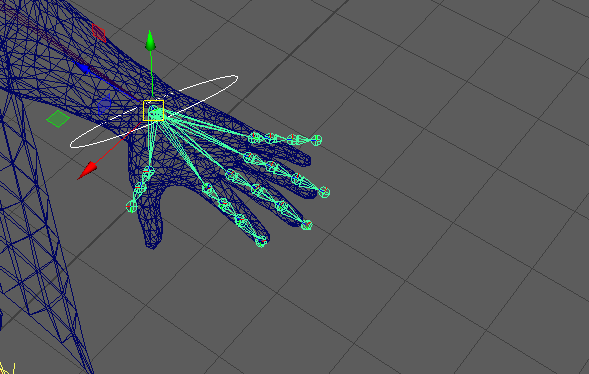
測試一下,旋轉圓環,可以擺動手腕
剩下的兩個圓環重復以下操作:
按V鍵同時拖動鼠標,把圓環的中心點和關節點對齊
把圓環凍結變換?
先選骨骼,再選圓環,約束--方向 選項 ,取消勾選 保持偏移,添加
再把約束刪除 (做這個約束就是為了把圓環和手臂關節對齊方向)
先選圓環,再選骨骼,約束--方向
重命名組
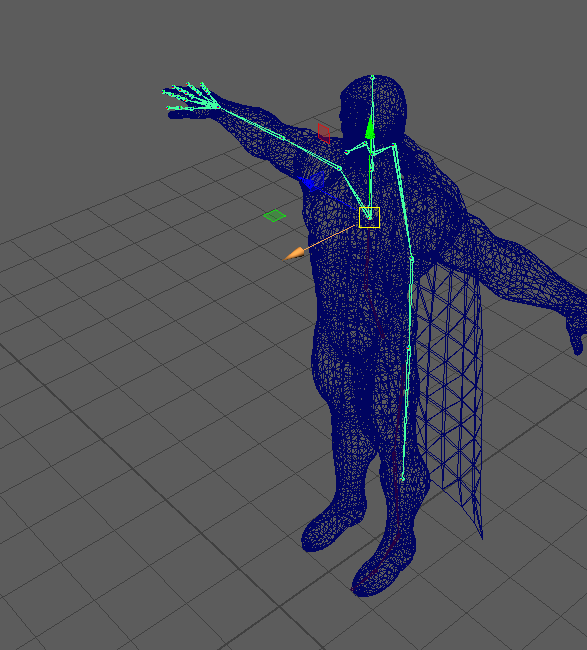
建立父子關系
先選中手腕的圓環,再選中小臂的骨骼,按P,做父子綁定
先選中手肘部的圓環,再選中大臂的骨骼,按P,做父子綁定
先選中大臂的圓環,再選中胸骨的骨骼,按P,做父子綁定
綁定以后 ,測試一下控制效果,旋轉大臂的圓環
手指控制 (略)
添加屬性
設置驅動關鍵幀
三 脊柱控制器 FK(略)
FK 控制器
勾選 保持偏移
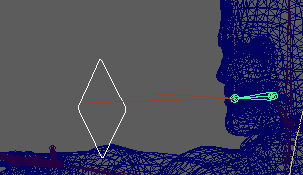
四 下顎(嘴部)控制器 IK
切換到綁定模塊

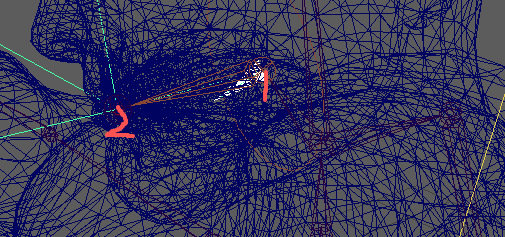
骨架--創建IK控制柄 工具設置
選 旋轉平面解算器,勾選 粘滯
鼠標點擊圖片中1、2關節位置
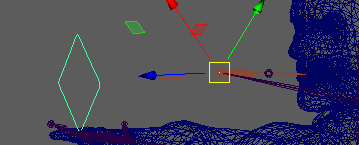
創建一個圓形 作為 控制器
把圓環旋轉90度
現在修改一下控制器的形狀 為方塊
控制頂點,選擇模式 同時選擇黃色這4個點
切換到旋轉,轉一下
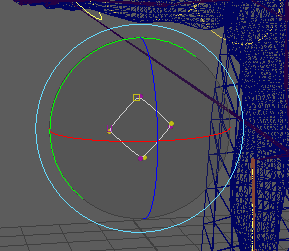
放在合適的位置
步驟1 控制器的軸心點和 被控制東西 的軸心點 對齊 (鍵盤上同時按住 D鍵和V鍵 + 鼠標拖動)
步驟2 修改--凍結變換 (控制器坐標 清0) ?→ 方便控制器歸位
步驟3 編輯--按類型刪除--歷史 ?(防止當前的歷史 參與以后的動畫運算)
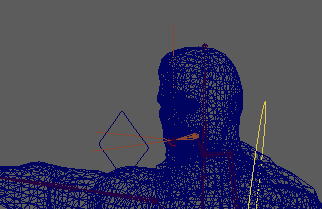
先選方塊,再選嘴里面的骨骼,約束 -- 點
測試一下
ctrl + A , 修改一下控制器的顏色
最后,嘴部控制器 和 頭部骨骼 做父子綁定
五 披風 FK(略)
六?全局控制器
父子關系連接 P
叁 烘焙動畫和導出
一 整理通道欄
用不到的屬性 鎖定并隱藏
顯示隱藏的屬性:
????????通道盒:編輯--通道控制
二? 蒙皮綁定、蒙皮權重
IK手柄:?
?? ?可見性改成0
?? ?
1 綁定骨骼和蒙皮
同時選中骨骼和模型
菜單欄--蒙皮--綁定蒙皮
注意:蒙皮時,不要選擇控制器
取消綁定蒙皮:
?? ?蒙皮--取消綁定蒙皮
?? ?
2 蒙皮權重
方法1 窗口--常規編輯器--組件編輯器--平滑蒙皮 (調整總體)
方法2 蒙皮--繪制蒙皮權重 ?(調整細節)
?? ?不透明度 和 值 相乘 是最終的值?
?? ?
?? ?繪制操作為 添加時:
?? ??? ?修改值 重復刷,值還是那個值
?? ??? ?修改不透明度,重復刷 權重會越來越大 ?→ ?用于快速增加某個關節的影響
?? ??? ?
? ? 按鍵B :控制筆刷大小
?? ?
?? ?刷權重的時候可以按住鼠標左鍵向上滑
?? ?(給人物不停地擺pose,不停地刷權重)
繪制操作:
?? ?添加:每畫一筆都增加
?? ?縮放:每畫一筆都 乘以現有的權重
?? ?替換
?? ?平滑:把附近的權重做一個中和處理
?? ?
鏡像蒙皮權重
?? ?蒙皮--鏡像蒙皮權重
三 建立角色組
?? ?
控制--創建角色集 選項--起個名字(記錄所有的關鍵幀)
右下角--選中角色
選控制器,全選屬性,控制--添加到角色集
G鍵 執行上一步操作
四?制作動畫
1 腳部 手部 姿勢
擺好一個姿勢--添加關鍵幀
...
第一幀粘貼到最后一幀(最后一幀要和第一幀一樣)
2 腰部動作
動畫層
新建一個動畫層,選中控制器,在動畫層上右鍵--添加選定對象
打上各個關鍵幀
在每個關鍵幀修改姿勢
3 頭部動作
再新建一個動畫層,選中控制器,在動畫層上右鍵--添加選定對象
打上各個關鍵幀
在每個關鍵幀修改姿勢
備注:動畫層下面可以修改權重,可以把其他動畫層關掉
...
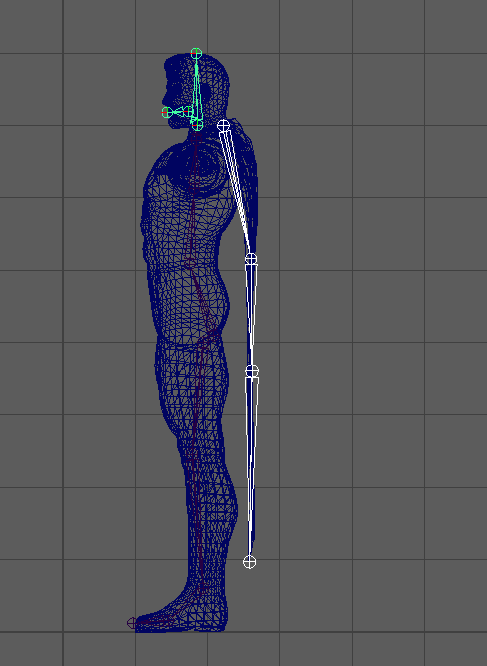
五?烘焙動畫到骨骼
1 烘焙動畫到骨骼
選中根骨骼,鼠標右鍵單擊--選擇層級
編輯--關鍵幀--烘焙模擬 選項
編輯--重置設置
勾選 開始/結束
結束時間:寫幀數 數字
烘焙
檢查動畫完好
2 刪掉控制器
把根骨骼上層的控制器 解綁:shift + p
把控制器刪掉
六?導出
文件--導出全部 選項 --文件類型:FBX export
導出全部 ?起個名字
或者 選擇所有的骨骼和模型,文件--導出當前選擇--文件類型:FBX export
導出當前選擇


:綜合項目實戰:Java 前后端分離架構部署)
)


:多重共線性)

)










)