? ? ? 下面整理了一些圖像相似度算法,可根據不同的需求選擇不同的算法,對每種算法進行了簡單描述并給出Python實現:
? ? ? 1. 基于像素的算法:
? ? ? (1).MSE(Mean Squared Error):均方誤差,通過計算兩幅圖像對應像素值差的平方和的平均值來衡量圖像間的差異。值越小表示兩幅圖像越相似;差異越大值越高,沒有上限;對噪聲/光照/幾何變換非常敏感;忽略結構信息,不符合人眼感知。
def mse(images1, images2):results = []for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE)for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE)mse = np.mean((img1.astype(np.float32) - img2.astype(np.float32)) ** 2)results.append((name1.name, name2.name, f"{mse:.2f}"))return results? ? ? (2).PSNR(Peak Signal-to-Noise Ratio):峰值信噪比,基于MSE的圖像質量評估指標,用于衡量圖像的失真程度。值越大表示圖像越接近(差異越小);常用于圖像壓縮質量評估;不符合人眼感知,對幾何變換敏感。
def psnr(images1, images2):results = []max_pixel = 255.0for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE)for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE)mse = np.mean((img1.astype(np.float32) - img2.astype(np.float32)) ** 2)if mse == 0:results.append((name1.name, name2.name, float("inf")))else:psnr = 10 * np.log10((max_pixel ** 2) / mse)results.append((name1.name, name2.name, f"{psnr:.2f}"))return results? ? ? (3).SSIM(Structural Similarity Index Measure):結構相似性指數,是一種感知圖像質量評估方法,它不是逐像素比較,而是模擬人眼感知,從亮度、對比度、結構三方面來評估兩幅圖像的相似度。值范圍為[-1, 1],越接近1表示兩幅圖像越相似;符合人眼感知,對亮度、對比度相對不敏感;對幾何變換不魯棒;參數需要調優。
def ssim(images1, images2):results = []L = 255K1 = 0.01; K2 = 0.03C1 = (K1 * L) ** 2; C2 = (K2 * L) ** 2kernel = (11, 11)sigma = 1.5for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE).astype(np.float32)mu1 = cv2.GaussianBlur(img1, kernel, sigma)mu1_sq = mu1 ** 2sigmal_sq = cv2.GaussianBlur(img1 ** 2, kernel, sigma) - mu1_sqfor name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE).astype(np.float32)mu2 = cv2.GaussianBlur(img2, kernel, sigma)mu2_sq = mu2 ** 2sigmal2_sq = cv2.GaussianBlur(img2 ** 2, kernel, sigma) - mu2_sqmu1_mu2 = mu1 * mu2sigmal2 = cv2.GaussianBlur(img1 * img2, kernel, sigma) - mu1_mu2ssim_map = ((2 * mu1_mu2 + C1) * (2 * sigmal2 + C2)) / \((mu1_sq + mu2_sq + C1) * (sigmal_sq + sigmal2_sq + C2))results.append((name1.name, name2.name, f"{np.mean(ssim_map):.4f}"))return results? ? ? 2.?基于直方圖的算法:
? ? ? (1).顏色直方圖:統計圖像中不同顏色值的分布情況。對平移、旋轉魯棒(只看顏色分布);對光照變化敏感;對顏色分布相似但結構不同的圖像區分能力弱;可用于基于顏色分布的圖像檢索、圖像去重。
def color_histogram(images1, images2):results = []bins = [50, 60]for name1 in images1:img1 = cv2.imread(str(name1))hsv1 = cv2.cvtColor(img1, cv2.COLOR_BGR2HSV)hist1 = cv2.calcHist([hsv1], [0, 1], None, bins, [0, 180, 0, 256])cv2.normalize(hist1, hist1, alpha=0, beta=1, norm_type=cv2.NORM_MINMAX)for name2 in images2:img2 = cv2.imread(str(name2))hsv2 = cv2.cvtColor(img2, cv2.COLOR_BGR2HSV)hist2 = cv2.calcHist([hsv2], [0, 1], None, bins, [0, 180, 0, 256])cv2.normalize(hist2, hist2, alpha=0, beta=1, norm_type=cv2.NORM_MINMAX)score = cv2.compareHist(hist1, hist2, cv2.HISTCMP_CORREL)results.append((name1.name, name2.name, f"{score:.4f}"))return results? ? ? (2).HOG(Histogram of Oriented Gradients):梯度直方圖,能有效描述圖像結構特征。對大角度旋轉、邊緣、紋理敏感;對光照變化魯棒;參數需要調優;可用于基于形狀的圖像檢索。
def _resize_padding(img, size, color = (0,0,0)):h, w = img.shape[:2]ratio = min(size[0] / w, size[1] / h)neww, newh = int(w*ratio), int(h*ratio)resized = cv2.resize(img, (neww, newh))padw = size[0] - newwpadh = size[1] - newhtop, bottom = padh // 2, padh - padh // 2left, right = padw // 2, padw - padw //2return cv2.copyMakeBorder(resized, top, bottom, left, right, borderType=cv2.BORDER_CONSTANT, value=color)def _cosine_similarity(feature1, feature2):dot = np.dot(feature1, feature2)norm1 = np.linalg.norm(feature1)norm2 = np.linalg.norm(feature2)if norm1 == 0 or norm2 == 0:return 0.0return dot / (norm1 * norm2)def hog(images1, images2):results = []win_size = (488, 488)cell_size = (8, 8)block_size = (16, 16)block_stride = (8, 8)nbins = 9hog = cv2.HOGDescriptor(_winSize=win_size, _blockSize=block_size, _blockStride=block_stride, _cellSize=cell_size, _nbins=nbins)for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE)img1 = _resize_padding(img1, win_size)feature1 = hog.compute(img1).flatten()for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE)img2 = _resize_padding(img2, win_size)feature2 = hog.compute(img2).flatten()results.append((name1.name, name2.name, f"{_cosine_similarity(feature1, feature2):.4f}"))return results? ? ? 3.?基于特征點的算法:
? ? ? (1).SIFT(Scale-Invariant Feature Transform):局部特征描述子算法。對尺度、旋轉、光照魯棒;可用于基于內容的圖像檢索。
def sift(images1, images2):results = []ratio_threshold = 0.75sift = cv2.SIFT_create()bf = cv2.BFMatcher(cv2.NORM_L2, crossCheck=False)for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE)kp1, des1 = sift.detectAndCompute(img1, None)for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE)kp2, des2 = sift.detectAndCompute(img2, None)if des1 is None or des2 is None:results.append((name1.name, name2.name, 0.0))continuetotal_features = min(len(kp1), len(kp2))if total_features == 0:results.append((name1.name, name2.name, 0.0))continuematches = bf.knnMatch(des1, des2, k=2)good_matches = []for match_pair in matches:if len(match_pair) == 2:m, n = match_pairif m.distance < ratio_threshold * n.distance:good_matches.append(m)results.append((name1.name, name2.name, f"{len(good_matches)/total_features:.4f}"))return results? ? ? (2).SURF(Speeded-Up Robust Features):快速的局部特征描述子算法,是SIFT的加速版本。默認的opencv-contrib-python包未啟用nonfree模塊,編譯OpenCV源碼時需開啟OPENCV_ENABLE_NONFREE選項。對尺度、旋轉、光照魯棒;可用于基于內容的圖像檢索、圖像去重。
? ? ? (3).ORB(Oriented FAST and Rotated BRIEF):快速的局部特征描述子算法。對旋轉魯棒;對尺度、光照敏感;計算速度快于SIFT/SURF。
def orb(images1, images2):results = []nfeatures = 1000orb = cv2.ORB_create(nfeatures=nfeatures)bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE)kp1, des1 = orb.detectAndCompute(img1, None)for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE)kp2, des2 = orb.detectAndCompute(img2, None)if des1 is None or des2 is None:results.append((name1.name, name2.name, 0.0))continuematches = bf.match(des1, des2)if len(matches) == 0:results.append((name1.name, name2.name, 0.0))continuegood_matches = sorted(matches, key=lambda x: x.distance)results.append((name1.name, name2.name, f"{len(good_matches)/min(len(kp1), len(kp2)):.4f}"))return results? ? ? (4).LBP(Local Binary Pattern):紋理特征描述算法。安裝scikit-image,直接調用其接口。對光照魯棒;對尺度、噪聲敏感。
def _lbp_histogram(img, P=8, R=1):lbp = local_binary_pattern(img, P, R, method="uniform")hist = cv2.calcHist([lbp.astype(np.float32)], [0], None, [P+2], [0, P+2])hist = cv2.normalize(hist, hist).flatten()return histdef lbp(images1, images2):results = []for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE)hist1 = _lbp_histogram(img1)for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE)hist2 = _lbp_histogram(img2)results.append((name1.name, name2.name, f"{_cosine_similarity(hist1, hist2):.4f}"))return results? ? ? (5).Template Matching:模板匹配,滑動窗口匹配方法。對尺度、光照敏感。
def template_matching(images1, images2):results = []method = cv2.TM_CCOEFF_NORMEDfor name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE)for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE)res = cv2.matchTemplate(img2, img1, method)min_val, max_val, _, _ = cv2.minMaxLoc(res)if method in [cv2.TM_SQDIFF, cv2.TM_SQDIFF_NORMED]:results.append((name1.name, name2.name, f"{1-min_val:.4f}"))else:results.append((name1.name, name2.name, f"{max_val:.4f}"))return results? ? ? (6).GLCM(Gray-Level Co-occurrence Matrix):灰度共生矩陣,提取紋理特征。參數需要調優;對噪聲、尺度敏感;對光照相對魯棒。
def _get_glcm_features(img):distances = [1]angles = [0, np.pi/4, np.pi/2, 3*np.pi/4]features = ["contrast", "correlation", "energy", "homogeneity"]img = cv2.equalizeHist(img)glcm = graycomatrix(img, distances=distances, angles=angles, symmetric=True, normed=True)feat = np.hstack([graycoprops(glcm, f).flatten() for f in features])return featdef glcm(images1, images2):results = []for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE)feat1 = _get_glcm_features(img1)for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE)feat2 = _get_glcm_features(img2)results.append((name1.name, name2.name, f"{_cosine_similarity(feat1, feat2):.4f}"))return results? ? ? (7).Hausdorff距離:衡量兩個點集之間的最大距離。對噪聲敏感。
def _get_hausdorff_contours(img):_, binary = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)contour = max(contours, key=cv2.contourArea)return contourdef hausdorff(images1, images2):results = []extractor = cv2.createHausdorffDistanceExtractor()for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE)contour1 = _get_hausdorff_contours(img1)for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE)contour2 = _get_hausdorff_contours(img2)results.append((name1.name, name2.name, f"{extractor.computeDistance(contour1, contour2):.4f}"))return results? ? ? 4.?基于頻域的算法:
? ? ? (1).FFT(Fast Fourier Transform):傅里葉變換,通過分析圖像在頻域的特性來計算相似度。對尺度敏感;對光照魯棒。
def _get_fft_features(img):f = cv2.dft(np.float32(img), flags=cv2.DFT_COMPLEX_OUTPUT)mag = cv2.magnitude(f[:,:,0], f[:,:,1])mag = np.log1p(mag)mag = cv2.normalize(mag, None, 0, 1, cv2.NORM_MINMAX)return mag.flatten()def fft(images1, images2):results = []for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE)v1 = _get_fft_features(img1)for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE)v2 = _get_fft_features(img2)results.append((name1.name, name2.name, f"{_cosine_similarity(v1, v2):.4f}"))return results? ? ? (2).Wavelet Transform:小波變換,通過將圖像分解為不同頻率和空間位置的小波系數來分析圖像特征。對噪聲魯棒。需安裝pywavelets。
? ? ? (3).DCT(Discrete Cosine Transform):離散余弦變換,將圖像從空間域轉換到頻域。對幾何變換、噪聲敏感;對光照魯棒。
def _get_dct_features(img, low_freq_size):dct = cv2.dct(np.float32(img))dct = dct[:low_freq_size, :low_freq_size]v = dct.flatten()v = (v - np.min(v)) / (np.max(v) - np.min(v) + 1e-8)return vdef dct(images1, images2):results = []low_freq_size = 8for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE)v1 = _get_dct_features(img1, low_freq_size)for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE)v2 = _get_dct_features(img2, low_freq_size)results.append((name1.name, name2.name, f"{_cosine_similarity(v1, v2):.4f}"))return results? ? ? 5.?基于哈希算法:
? ? ? (1).pHash(Perceptual Hash):感知哈希,將圖片轉換成哈希值的方法,通過比較哈希值的漢明距離(Hamming Distance)計算相似度。可用于圖像去重。
def _get_hash_value(img, low_freq_size):dct = cv2.dct(np.float32(img))dct = dct[:low_freq_size, :low_freq_size]mean = np.mean(dct)value = (dct > mean).astype(np.uint8).flatten()return valuedef _hamming_distance(hash1, hash2):return np.count_nonzero(hash1 != hash2)def phash(images1, images2):results = []hash_size = 32low_freq_size = 8for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_GRAYSCALE)img1 = cv2.resize(img1, (hash_size, hash_size))hash_value1 = _get_hash_value(img1, low_freq_size)for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_GRAYSCALE)img2 = cv2.resize(img2, (hash_size, hash_size))hash_value2 = _get_hash_value(img2, low_freq_size)dist = _hamming_distance(hash_value1, hash_value2)results.append((name1.name, name2.name, f"{1 - dist / hash_value1.size:.4f}"))return results? ? ? 除pHash外還有aHash(Average Hash,均值哈希)、dHash(Difference Hash,差值哈希)等。
? ? ? 6.?基于深度學習的算法:CNN特征提取,CNN特征比傳統手工特征更魯棒;無需重新訓練,直接使用已有的預訓練模型即可;提取特征后可使用余弦相似度、歐式距離等計算相似度。以下是使用DenseNet和ResNet預訓練模型的代碼:
def cnn(images1, images2, net_name):if net_name == "densenet":model = models.densenet121(weights=models.DenseNet121_Weights.DEFAULT) # densenet121-a639ec97.pthelse:model = models.resnet101(weights=models.ResNet101_Weights.DEFAULT) # resnet101-cd907fc2.pthmodel = nn.Sequential(*list(model.children())[:-1])# print(f"model: {model}")model.eval()device = torch.device("cuda" if torch.cuda.is_available() else "cpu")model.to(device)transform = transforms.Compose([transforms.Resize((224, 224)),transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])])def _extract_features(name):img = Image.open(name).convert("RGB")tensor = transform(img).unsqueeze(0).to(device) # [1, 3, 224, 224]with torch.no_grad():features = model(tensor) # densenet: [1, 1024, 7, 7]; resnet: [1, 2048, 1, 1]if net_name == "densenet":features = F.adaptive_avg_pool2d(features, (1, 1)) # densenet: [1, 1024, 1, 1]return features.cpu().numpy().flatten()results = []for name1 in images1:features1 = _extract_features(str(name1))for name2 in images2:features2 = _extract_features(str(name2))results.append((name1.name, name2.name, f"{_cosine_similarity(features1, features2):.4f}"))return results? ? ? 其它輔助代碼如下所示:
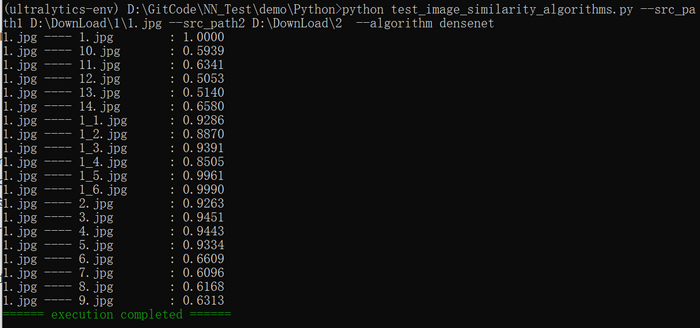
def parse_args():parser = argparse.ArgumentParser(description="summary of image similarity algorithms")parser.add_argument("--algorithm", required=True, type=str, choices=["mse", "psnr", "ssim", "color_histogram", "hog", "sift", "orb", "lbp", "template_matching", "glcm", "hausdorff", "fft", "dct", "phash", "densenet", "resnet"], help="specify what kind of algorithm")parser.add_argument("--src_path1", required=True, type=str, help="source images directory or image name")parser.add_argument("--src_path2", required=True, type=str, help="source images directory or image name")parser.add_argument("--suffix1", type=str, default="jpg", help="image suffix")parser.add_argument("--suffix2", type=str, default="jpg", help="image suffix")args = parser.parse_args()return argsdef _get_images(src_path, suffix):images = []path = Path(src_path)if path.is_dir():images = [img for img in path.rglob("*."+suffix)]else:if path.exists() and path.name.split(".")[1] == suffix:images.append(path)if not images:raise FileNotFoundError(colorama.Fore.RED + f"there are no matching images: src_path:{src_path}; suffix:{suffix}")return imagesdef _check_images(images1, images2):for name1 in images1:img1 = cv2.imread(str(name1), cv2.IMREAD_UNCHANGED)if img1 is None:raise FileNotFoundError(colorama.Fore.RED + f"image not found: {name1}")for name2 in images2:img2 = cv2.imread(str(name2), cv2.IMREAD_UNCHANGED)if img1 is None:raise FileNotFoundError(colorama.Fore.RED + f"image not found: {name2}")if img1.shape != img2.shape:raise ValueError(colorama.Fore.RED + f"images must have the same dimensions: {img1.shape}:{img2.shape}")def _print_results(results):for ret in results:print(f"{ret[0]} ---- {ret[1]}\t: {ret[2]}")if __name__ == "__main__":colorama.init(autoreset=True)args = parse_args()images1 = _get_images(args.src_path1, args.suffix1)images2 = _get_images(args.src_path2, args.suffix2)_check_images(images1, images2)if args.algorithm == "mse": # Mean Squared Errorresults = mse(images1, images2)elif args.algorithm == "psnr": # Peak Signal-to Noise Ratioresults = psnr(images1, images2)elif args.algorithm == "ssim": # Structural Similarity Index Measureresults = ssim(images1, images2)elif args.algorithm == "color_histogram":results = color_histogram(images1, images2)elif args.algorithm == "hog": # Histogram of Oriented Gradientsresults = hog(images1, images2)elif args.algorithm == "sift": # Scale-Invariant Feature Transformresults = sift(images1, images2)elif args.algorithm == "orb": # Oriented FAST and Rotated BRIEFresults = orb(images1, images2)elif args.algorithm == "lbp": # Local Binary Pattenresults = lbp(images1, images2)elif args.algorithm == "template_matching":results = template_matching(images1, images2)elif args.algorithm == "glcm": # Gray-Level Co-occurrence Matrixresults = glcm(images1, images2)elif args.algorithm == "hausdorff": # Hausdorff distanceresults = hausdorff(images1, images2)elif args.algorithm == "fft": # Fast Fourier Transformresults = fft(images1, images2)elif args.algorithm == "dct": # Discrete Cosine Transformresults = dct(images1, images2)elif args.algorithm == "phash": # Perceptual Hashresults = phash(images1, images2)elif args.algorithm == "densenet" or args.algorithm == "resnet":results = cnn(images1, images2, args.algorithm)_print_results(results)print(colorama.Fore.GREEN + "====== execution completed ======")? ? ? 基于DenseNet的執行結果如下圖所示:
? ? ? GitHub:https://github.com/fengbingchun/NN_Test







頁表查找)



)







