一個進程打開一個文件,另一個進程能刪除這個文件嗎
DeepSeek-R1 回答完成
深度思考完成 用時10秒
是的,?另一個進程可以刪除一個已被打開的文件?,但具體行為取決于操作系統和文件系統。以下是關鍵細節:
1. ?Linux/Unix 的行為?
- ?刪除操作立即生效?:
當進程 A 打開文件?test.txt?后,進程 B 調用?rm test.txt?刪除該文件:- 文件在目錄中的鏈接會被?立即移除?(其他進程無法再通過路徑訪問)。
- ?進程 A 仍可正常讀寫文件?:因為 Linux 通過文件描述符(FD)引用文件,實際數據在磁盤上?未被清除?,直到所有打開該文件的進程關閉它。
- ?文件何時真正刪除??
只有當?所有打開該文件的進程都關閉它?,且?無其他硬鏈接?時,文件占用的磁盤空間才會被釋放。 - ?驗證方法?:
進程 A 打開文件后,另一個進程刪除文件,進程 A 仍可通過?read()/write()?操作文件,且能用?lseek()?移動指針。
2. ?Windows 的行為?
- ?默認禁止刪除?:
如果進程 A 以普通模式(非共享)打開文件,進程 B 嘗試刪除時會?失敗?,系統拋出錯誤(如?ERROR_SHARING_VIOLATION)。 - ?允許刪除的情況?:
- 進程 A 打開文件時?顯式聲明共享刪除權限?(
FILE_SHARE_DELETE)。 - 進程 B 調用?
DeleteFile?后:- 文件在目錄中標記為待刪除。
- 進程 A 仍可讀寫文件,但?無法再打開新句柄?。
- 當?所有進程關閉文件句柄?后,文件才被實際刪除。
- 進程 A 打開文件時?顯式聲明共享刪除權限?(
3. ?編程示例(Linux)?
# 進程 A:打開并持有文件
with open("test.txt", "w") as f:f.write("Hello") # 寫入成功input("文件已打開,按回車結束...") # 暫停,模擬長期持有# 此時在另一個終端執行:`rm test.txt`
# 進程 A 仍可繼續操作文件(如 f.write("World"))
- 執行?
rm?后,ls?看不到?test.txt,但進程 A 可通過已打開的文件描述符繼續讀寫。
4. ?風險與注意事項?
- ?數據安全?:
若進程在文件被刪除后未及時保存變更,可能丟失數據(尤其是未刷新緩沖區的寫入)。 - ?開發建議?:
- 對關鍵文件使用 ?文件鎖?(如?
fcntl.flock())防止誤刪。 - 臨時文件推薦用?
O_TMPFILE(Linux)避免可見性。
- 對關鍵文件使用 ?文件鎖?(如?
- ?恢復文件?:
在 Linux 中可通過?/proc/<PID>/fd/?找到已刪除但被進程打開的文件副本。
總結
| 操作系統 | 是否允許刪除已打開文件? | 文件實際刪除時機 |
|---|---|---|
| Linux | ?是?(立即移除路徑) | 所有進程關閉文件后 |
| Windows | ?默認否?(需共享權限) | 所有進程關閉文件后 |
?結論?:另一個進程可以刪除文件,但已打開文件的進程仍能繼續操作它,直到關閉文件句柄。這是操作系統通過?文件描述符引用計數?實現的機制。
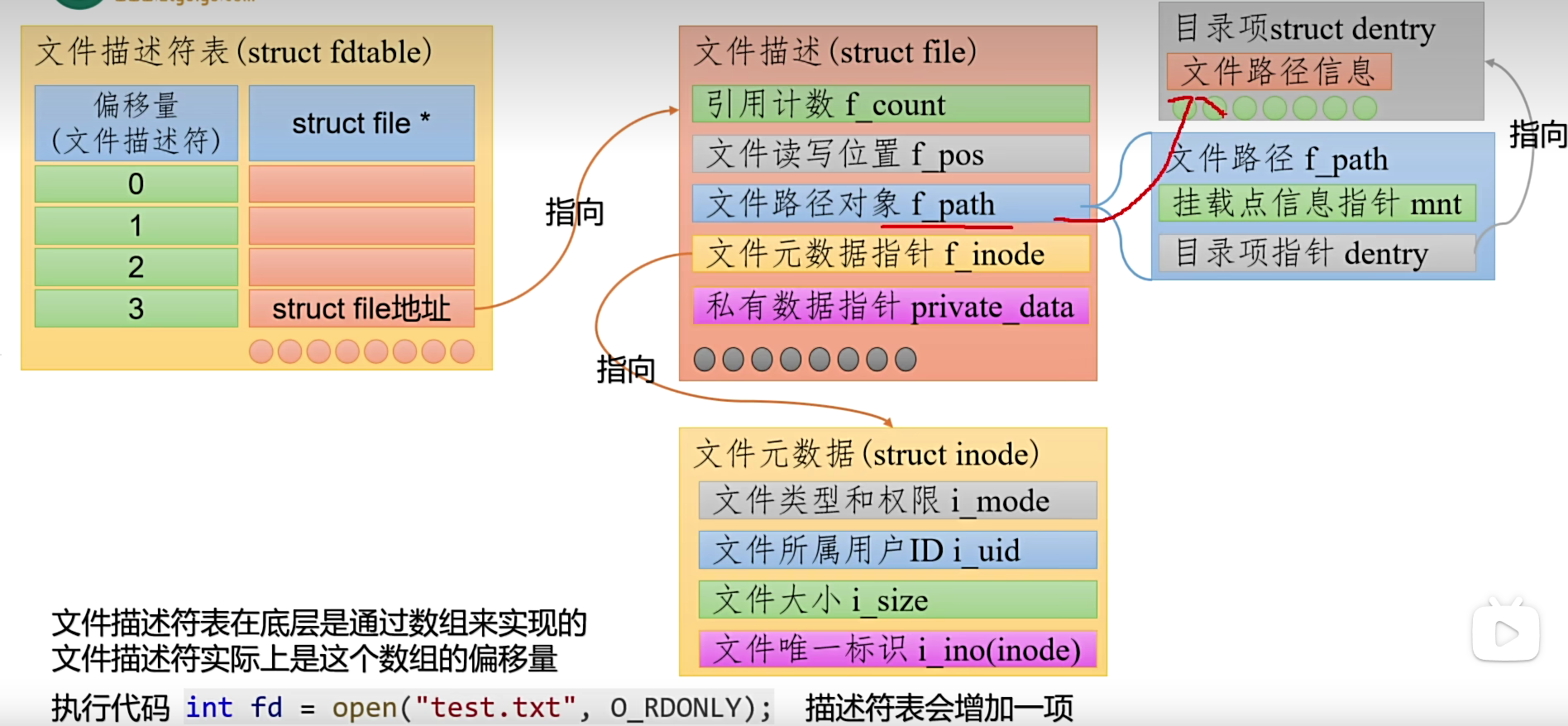
文件描述符相關概念?
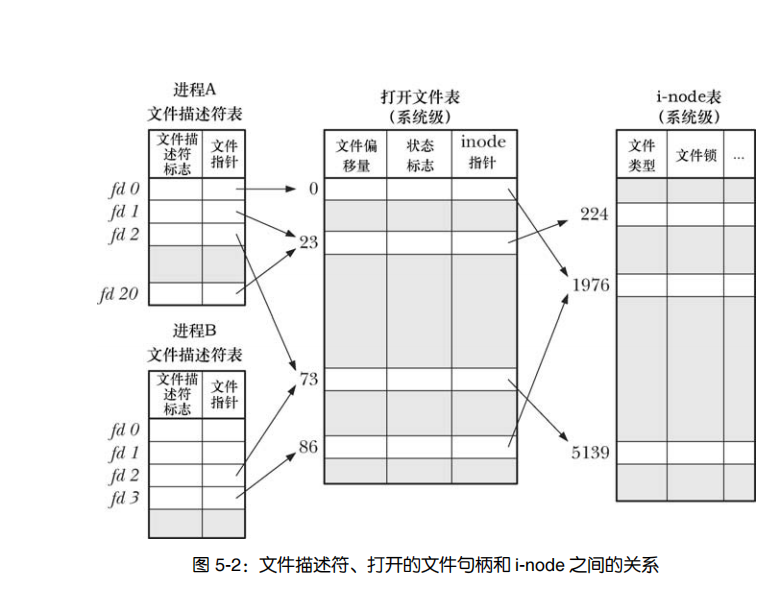
參考?Linux-UNIX系統編程手冊
?
 ?
?
?
 ?
?
struct mutex f_pos_lock內部變量
struct mutex f_pos_lock?是 Linux 內核中用于保護文件位置指針(f_pos)的互斥鎖,其內部變量和實現機制如下:
1. ?核心內部變量?
- ?
owner(原子變量)?
存儲當前持有鎖的任務指針(struct task_struct*),并通過低位比特記錄附加狀態(如等待隊列非空)。鎖未被持有時值為?NULL。?1 - ?
wait_list(等待隊列)?
管理因競爭鎖而進入睡眠狀態的線程,確保公平性。?1 - ?
osq(MCS 自旋鎖)?
在支持?CONFIG_MUTEX_SPIN_ON_OWNER?的系統上,用于優化自旋等待(僅允許一個線程自旋競爭鎖)。?1
2. ?關鍵特性?
| 特性 | 說明 |
|---|---|
| ?原子操作? | 通過?cmpxchg()?實現快速路徑的無競爭鎖獲取。?1 |
| ?樂觀自旋? | 若鎖持有者正在運行,當前任務可能短暫自旋以減少睡眠開銷。?1 |
| ?優先級繼承? | 防止優先級反轉(高優先級任務因低優先級任務持有鎖而阻塞)。?2 |
| ?不可遞歸? | 同一線程重復加鎖會觸發死鎖。?1 |
3. ?典型工作流程?
- ?快速路徑?:通過原子操作直接獲取鎖(無競爭時)。?1
- ?中速路徑?:若鎖被占用但持有者正在運行,嘗試樂觀自旋。?1
- ?慢速路徑?:競爭失敗時加入等待隊列并進入睡眠,直到鎖釋放后被喚醒。?1
4. ?與文件系統的關聯?
- ?保護對象?:
f_pos_lock?專門用于同步對?struct file?中?f_pos(文件偏移量)的并發訪問。?3 - ?使用場景?:在?
read()/write()?等系統調用中,通過?file_pos_read()?和?file_pos_write()?函數間接操作此鎖。?3
5. ?性能優化設計?
- ?MCS 鎖隊列?:減少多核競爭時的緩存行同步開銷。?1
- ?動態路徑選擇?:根據競爭狀態自動切換快速/中速/慢速路徑以平衡響應速度和吞吐量。?1
?總結?:f_pos_lock?是內核級互斥鎖,通過原子變量、等待隊列和自旋優化機制實現高效安全的文件位置同步。
?struct task_struct* 內部
?
struct task_struct?是 Linux 內核中描述進程/線程的核心數據結構,其內部成員涵蓋任務調度、資源管理、狀態跟蹤等關鍵信息。以下是主要組成部分及功能解析:
1. ?任務標識與狀態?
- ?
pid_t pid?
進程的唯一標識符(PID),用于用戶空間和內核的進程管理。?12 - ?
volatile long state?
記錄任務當前狀態(如?TASK_RUNNING、TASK_INTERRUPTIBLE?等),決定調度器行為。?23 - ?
int exit_state?
進程退出時的狀態碼(如?EXIT_ZOMBIE)。?3
2. ?調度相關?
- ?
struct sched_entity se?
包含調度權重、虛擬運行時間(vruntime)等,用于 CFS 調度器計算優先級。?23 - ?
struct sched_class *sched_class?
指向調度類(如?fair_sched_class),定義任務調度策略。?3 - ?
int prio?
動態優先級,實時任務范圍 0-99,普通任務 100-139。?2
3. ?內存管理?
- ?
struct mm_struct *mm?
指向進程的內存描述符,管理虛擬內存布局、頁表等。?12 - ?
struct vm_area_struct *mmap?
進程的虛擬內存區域(VMA)鏈表,記錄映射的地址空間。?2
4. ?文件系統與IO?
- ?
struct files_struct *files?
打開的文件描述符表,包含?fd_array?數組和文件指針。?23 - ?
struct fs_struct *fs?
文件系統信息(如當前工作目錄、根目錄)。?2
5. ?信號與進程間通信?
- ?
struct signal_struct *signal?
信號處理結構體,包含信號掩碼、處理函數等。?23 - ?
struct list_head tasks?
鏈接所有進程的雙向鏈表節點,用于全局進程遍歷。?2
6. ?線程與同步?
- ?
struct thread_struct thread?
架構相關的線程上下文(如寄存器狀態、浮點單元)。?12 - ?
struct mutex_waiter *blocked_on?
若任務因互斥鎖阻塞,指向對應的?mutex_waiter?對象。?14
7. ?調試與統計?
- ?**
unsigned long nvcsw****?
自愿上下文切換計數(主動讓出 CPU)。?3 - ?
struct taskstats *stats?
任務資源使用統計(如 CPU 時間、內存占用)。?2
8. ?其他關鍵成員?
- ?
struct cred *cred?
任務憑證(如 UID、GID、能力集)。?23 - ?
struct list_head children?
子進程鏈表,用于維護進程樹關系。?2
?總結?:struct task_struct?是內核管理任務的“控制塊”,通過數百個成員實現進程調度、資源隔離和狀態維護,其設計體現了性能與功能的平衡。




)





創建型:原型模式詳解)

)






