【導讀】
在目標檢測領域,YOLO系列以其高效的推理速度廣受歡迎,而Transformer結構則在精度上展現出強大潛力。如何兼顧二者優勢,打造一個“又快又準”的模型,是近年來研究熱點之一。本文介紹的一項新研究——YotoR(You Only Transform One Representation),首次將Swin Transformer與YoloR架構深度融合,提出了一套新的混合檢測模型家族,在多個評測任務中都實現了對原模型的性能超越,值得重點關注。
在過去的研究中,Transformer雖然在圖像分類、分割等任務中展現了強大的全局建模能力,但由于計算復雜度高、速度慢,它一直難以進入實時目標檢測的主流應用。而另一方面,以YOLO為代表的CNN結構,雖在速度上有明顯優勢,但在復雜場景下的檢測精度仍有提升空間。
能否將二者優勢融合?
這正是YotoR模型所嘗試解決的問題。
一、YotoR模型:你只需要轉換一個表示
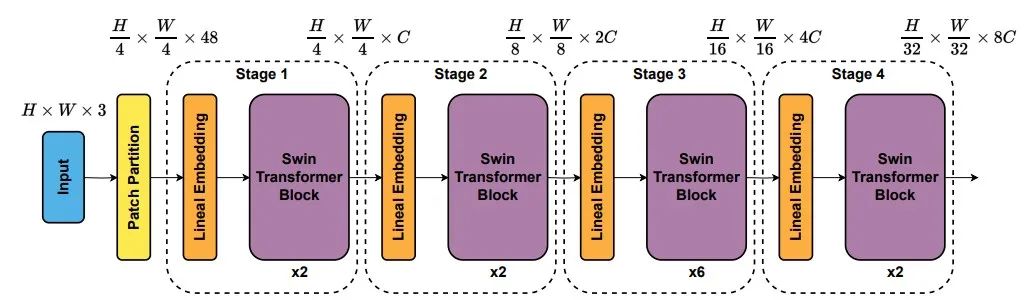
YotoR模型系列,其核心思路是結合Swin Transformer作為特征提取器,再連接YoloR的檢測頭,兼顧Transformer的建模能力和YOLO系列的實時性。
YotoR的結構看似簡單,實則暗藏巧思:
Swin Transformer:負責提取層次化的全局特征;
YoloR Head & Neck:借助YOLO家族成熟的檢測機制,實現快速、高效的目標定位。
這種混合式設計不僅提升了檢測性能,還大大縮短了Transformer模型的推理時延。
命名形式
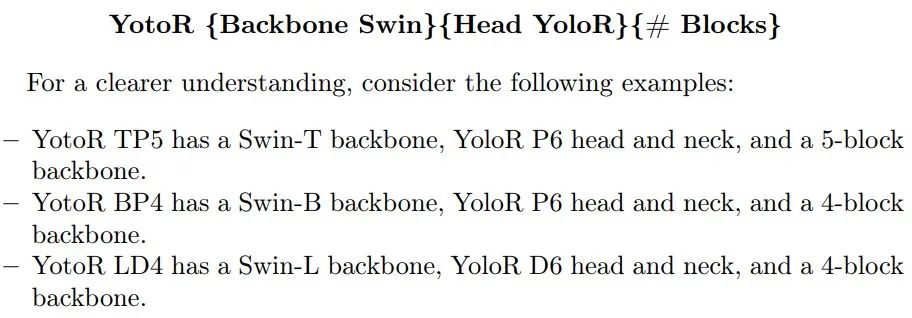
YotoR {Backbone類型}{Head版本}{Block數量}
YotoR TP5:Swin-Tiny?作為 Backbone,YoloR-P6 作為 Head,使用 5 個主干模塊;
YotoR BP4:Swin-Base + YoloR-P6 + 4?個主干模塊;
YotoR BB4:Swin-Base +?自適配的 YoloR 頭部,去除了尺寸適配卷積,更“原生”融合。
其中 TP5 和 BP4 是本文重點實驗對象。
二、技術亮點:為什么YotoR值得深入關注?
YotoR 不只是結構的拼接,更是一種有針對性地融合。它在以下幾個關鍵維度上帶來了突破:
高效融合Transformer與YOLO:兼顧全局與實時性
Swin Transformer 具備強大的全局建模和層次特征提取能力,但其計算復雜度高,限制了在高分辨率檢測任務中的實時部署。
YoloR 架構則以輕量、高速、實用著稱,特別適合邊緣設備和實時響應場景。
YotoR的創新點在于,利用Swin Transformer作為特征提取Backbone,再通過YoloR的Neck+Head結構進行快速目標回歸,從而平衡精度與推理速度,填補了“高性能但不實時”和“實時但不夠準”之間的空檔。
精心設計的連接適配模塊,消除信息瓶頸
Transformer提取的特征與YOLO系列的輸入維度存在差異。YotoR在連接這兩個模塊時,通過線性嵌入+1×1卷積對通道數、空間維度進行匹配,確保特征信息不被壓縮或截斷。
其中:
YotoR TP4是基礎結構,但存在連接通道不匹配導致的信息瓶頸;
YotoR TP5、BP4在結構設計上補足了關鍵層級,使得信息傳遞更順暢,表現明顯優于原YOLO和Transformer模型。
無需改動Transformer結構,原生支持預訓練權重
相比某些結構重構方法,YotoR不修改Swin Transformer的主體結構,這意味著可以直接復用公開的ImageNet預訓練模型,顯著加快收斂速度、降低訓練成本。
這種“原生融合”的設計,不僅簡化了實現,也為未來的遷移學習、多任務檢測奠定了良好基礎。
可擴展性強,支持不同規模組合
YotoR提供了多種組合方式(TP4、TP5、BP4、BB4等),對應不同任務對速度、精度、資源消耗的要求。
未來可以根據業務場景,進一步探索如下組合:
更強 backbone:如?Swin-L + YoloR-D6 → YotoR LD5;
更輕 head:替換為?Nano Head?→ 部署到?Jetson/樹莓派;
多模態輸入:引入熱紅外、深度圖等信息。
三、實驗結果詳解:YotoR到底有多強?
研究團隊在MS COCO數據集上對多個YotoR模型進行了全面評估,重點對比對象包括:
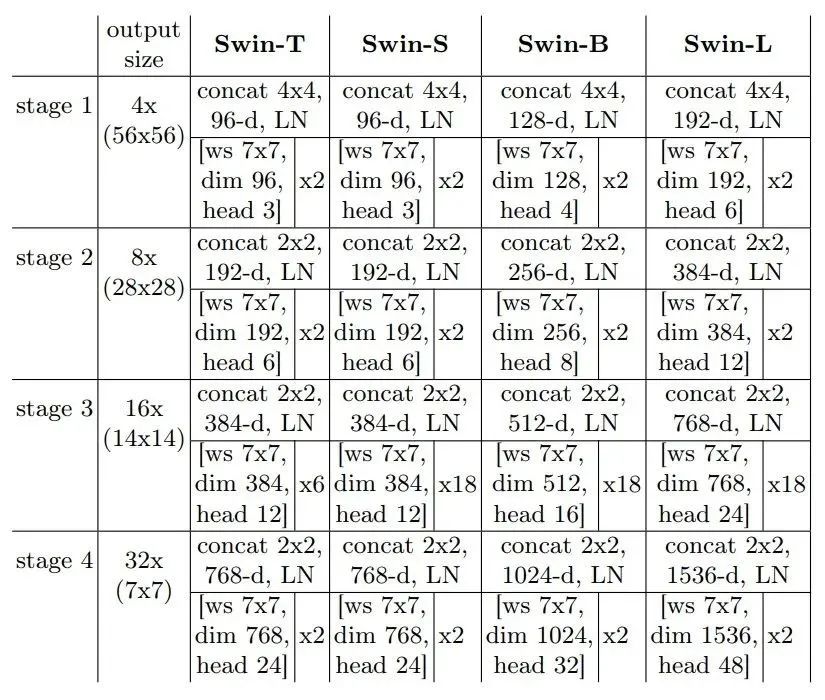
Swin Transformer?原始模型(Swin-T、Swin-B)
YoloR P6(當前主流的 YOLO 檢測模型之一)
提出的 YotoR 變體(TP4、TP5、BP4、BB4)
檢測精度:YotoR全面超越原模型
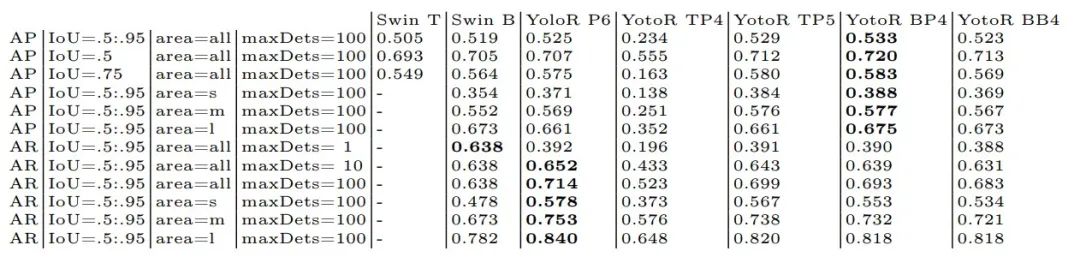
結論:YotoR 在整體 mAP 上超越了 Swin 和 YoloR 各自的基線模型,尤其在中大目標上表現突出,BP4在大目標檢測上性能最優。
推理速度:提升明顯,達到實用級幀率
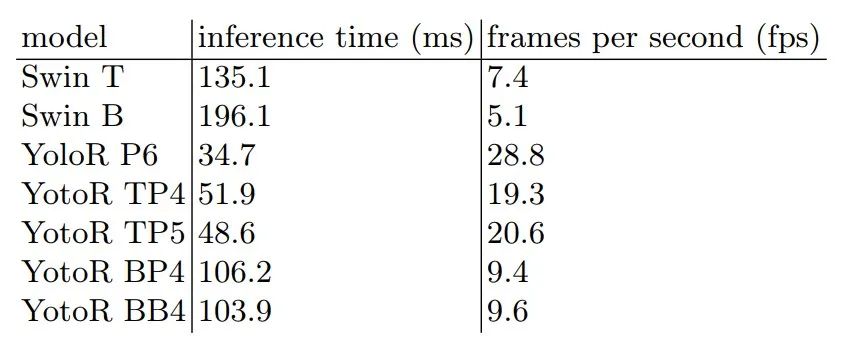
結論:雖然無法完全追平 YOLO 的速度,但TP5 幀率比 Swin-T 提升178%,同時在精度上更優;BP4 則比 Swin-B 快了近一倍。
綜合表現:YotoR實現更優精度-速度權衡
如下圖所示(論文圖4),YotoR 模型均處于“更高精度+更快速度”的優勢區域,表現出極佳的實用性。
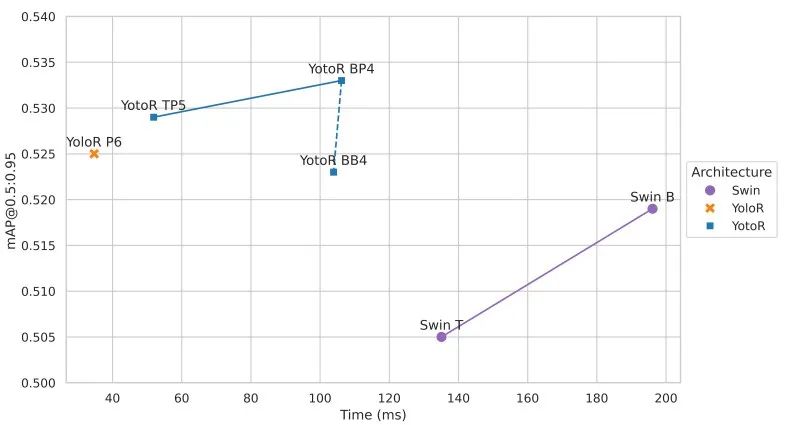
YotoR 模型的 mAP/FPS 均衡點,優于單獨使用 YOLO 或 Swin Transformer 的任一模型。
四、實戰架構解析
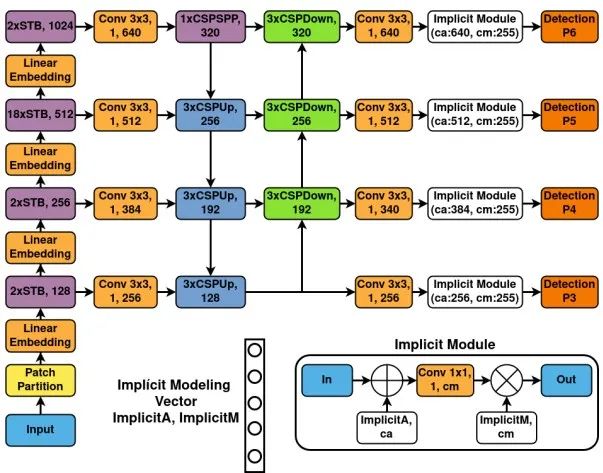
以 YotoR BP4 為例,其結構如下:
Backbone:Swin-B Transformer,提取多尺度特征;
Linear Embedding:用于對齊 Swin 輸出與 YoloR 輸入;
Neck & Head:YoloR P6?結構,用于生成最終檢測框;
特別設計了結構對齊與卷積通道調整模塊,確保兩部分自然過渡,避免信息瓶頸。
此外,YotoR 還支持不同規模模型的組合,如 TP4、TP5、BB4,滿足從輕量級到高性能的多場景需求。
總結
YotoR以其創新的結構設計和優秀的實戰表現,為目標檢測領域提供了一個兼具Transformer精度優勢與YOLO實時效率的融合范式。在輕量化部署、工業視覺、自動駕駛等高要求場景中,它無疑將成為極具潛力的新一代解決方案。


解決ZDT1問題)
--智能體管理)



)
)
)
)








,附下載鏈接)