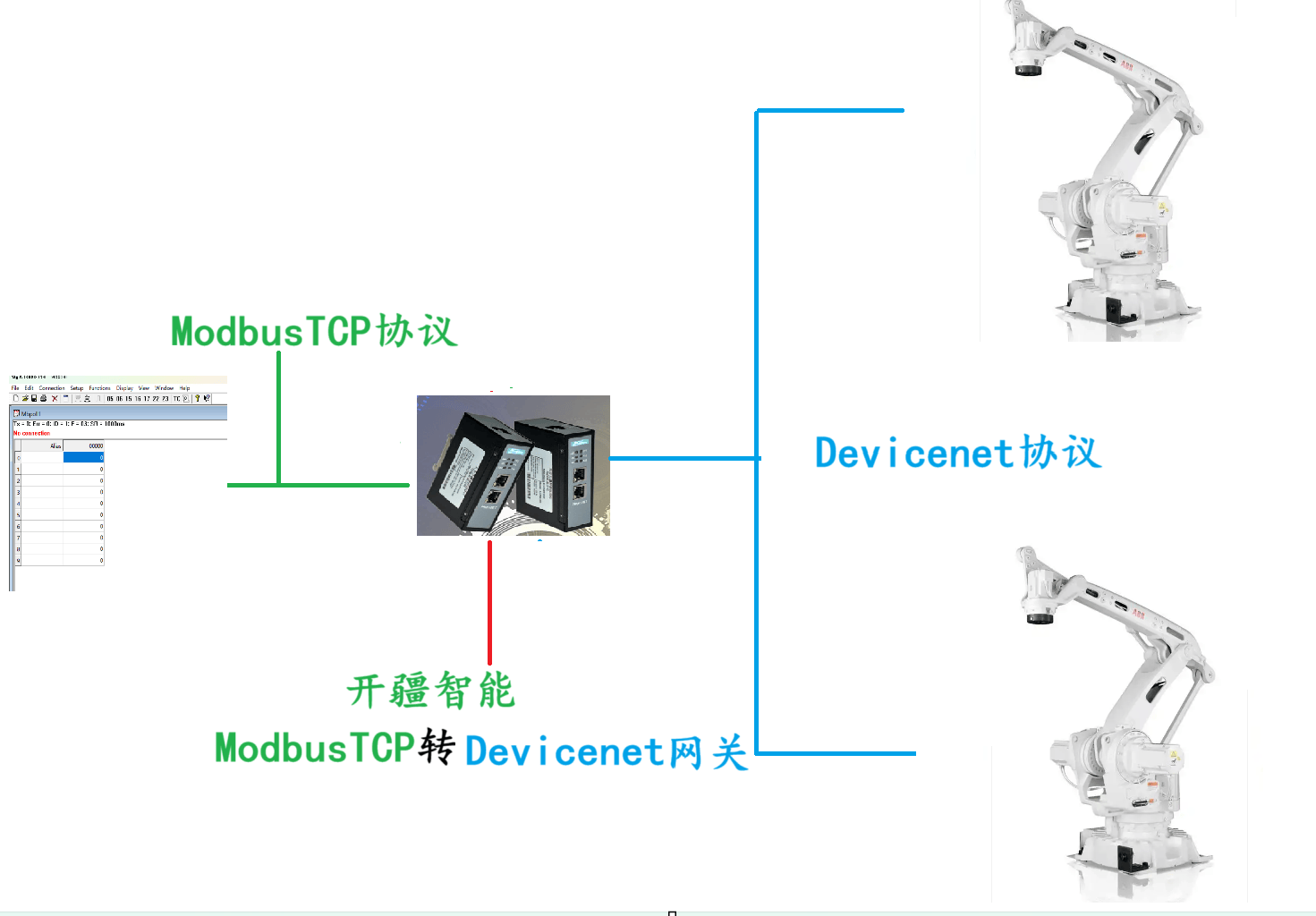
本案例是模擬ModbusTCP主站軟件通過開疆智能ModbusTCP轉Devicenet網關連接ABB機器人的配置案例,具體過程如下。
配置過程
ABB機器人IO板配置
1、簡介
(ABB老版本IO板通訊配置為UNIT,新版本IO板通訊配置為DeviceNet device,此日記以新版本DeviceNet device進行學習)
709-1 DeviceNet Master/Slave ABB官方數據手冊:
709-1 DeviceNet Master/Slave的使用需要有硬件DSQC1095 DeviceNet板。
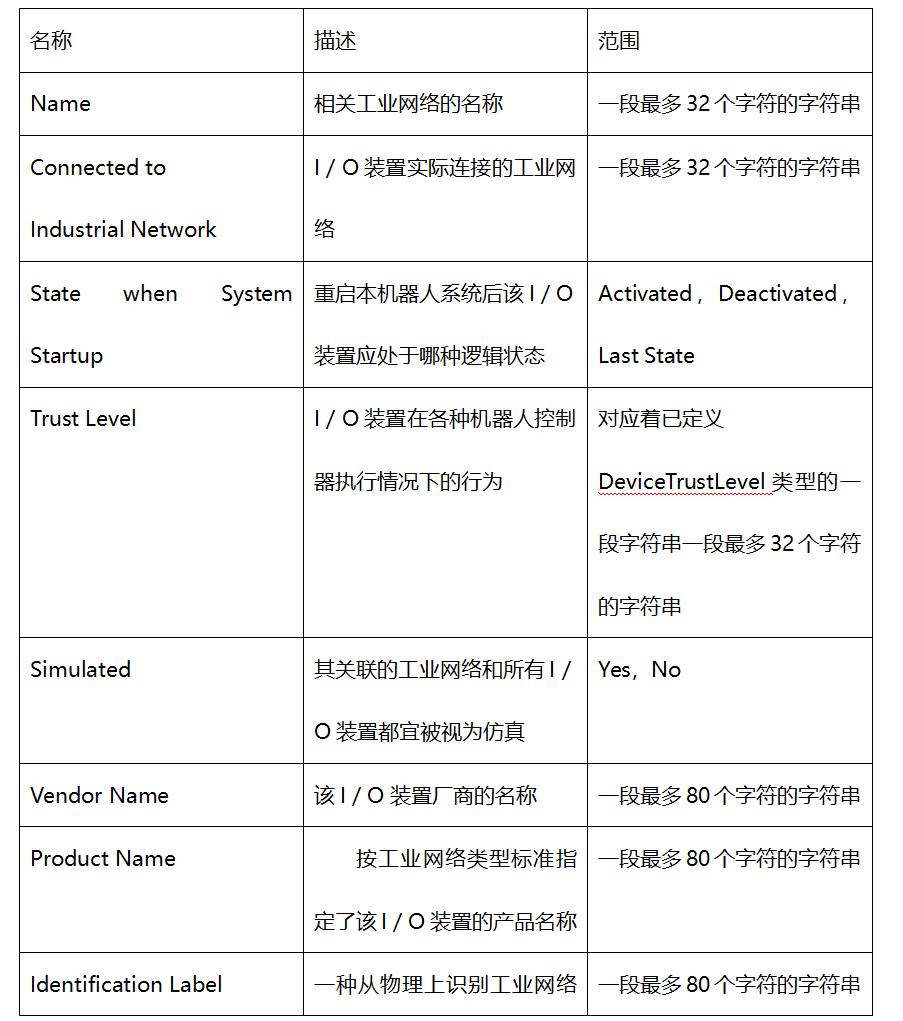
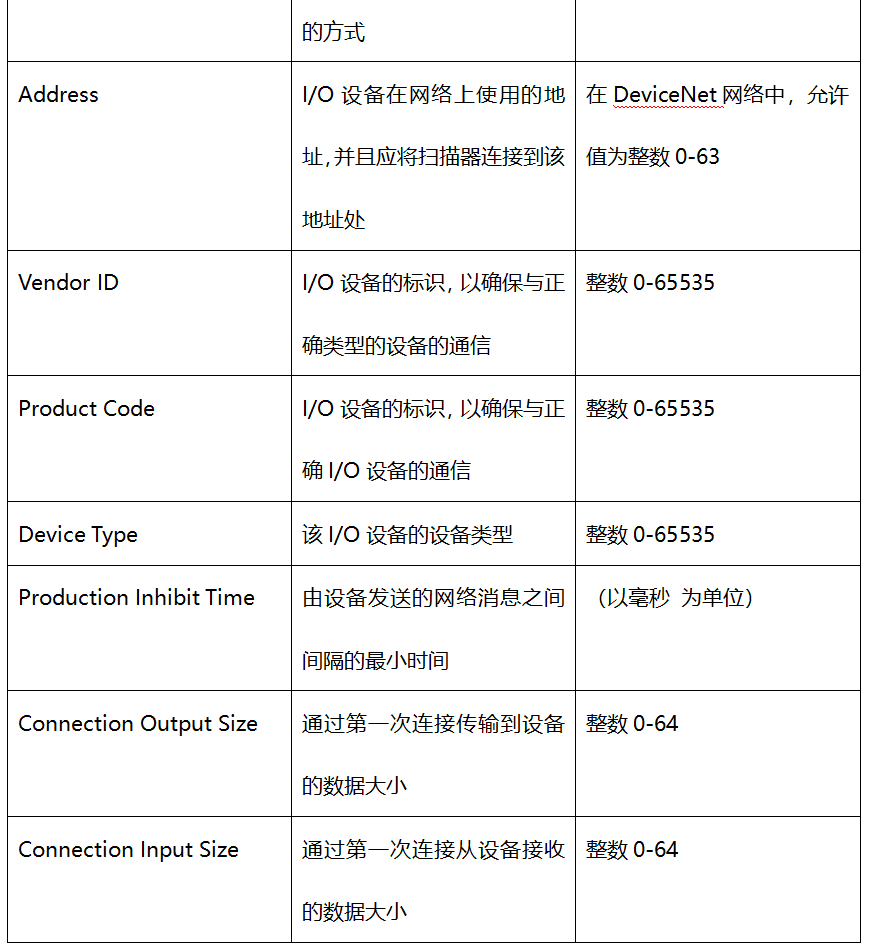
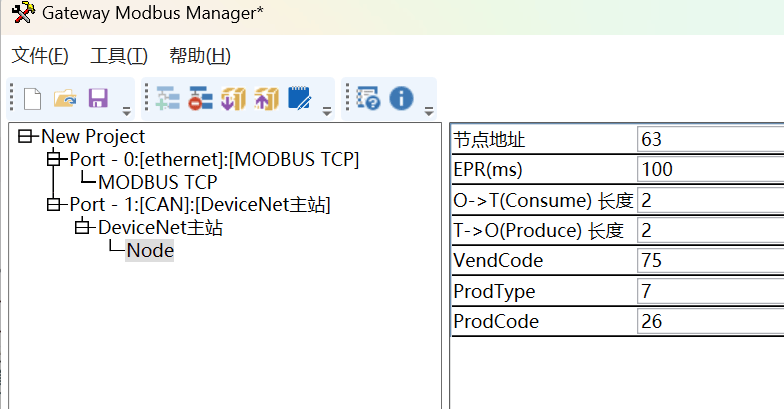
2、DeviceNet Device參數表
3、配置方法
在Robot Studio 6.08創建好工程并導入機器人模型與添加控制器后,點擊控制器選項卡打開配置下拉菜單,選擇I/O System。在I/O System列表中找到DeviceNet device選項,右鍵新建。在彈出的對話框選擇對應的I/O模版,這邊以DSQC 652(16個字量輸入和16個字量輸出)為例。
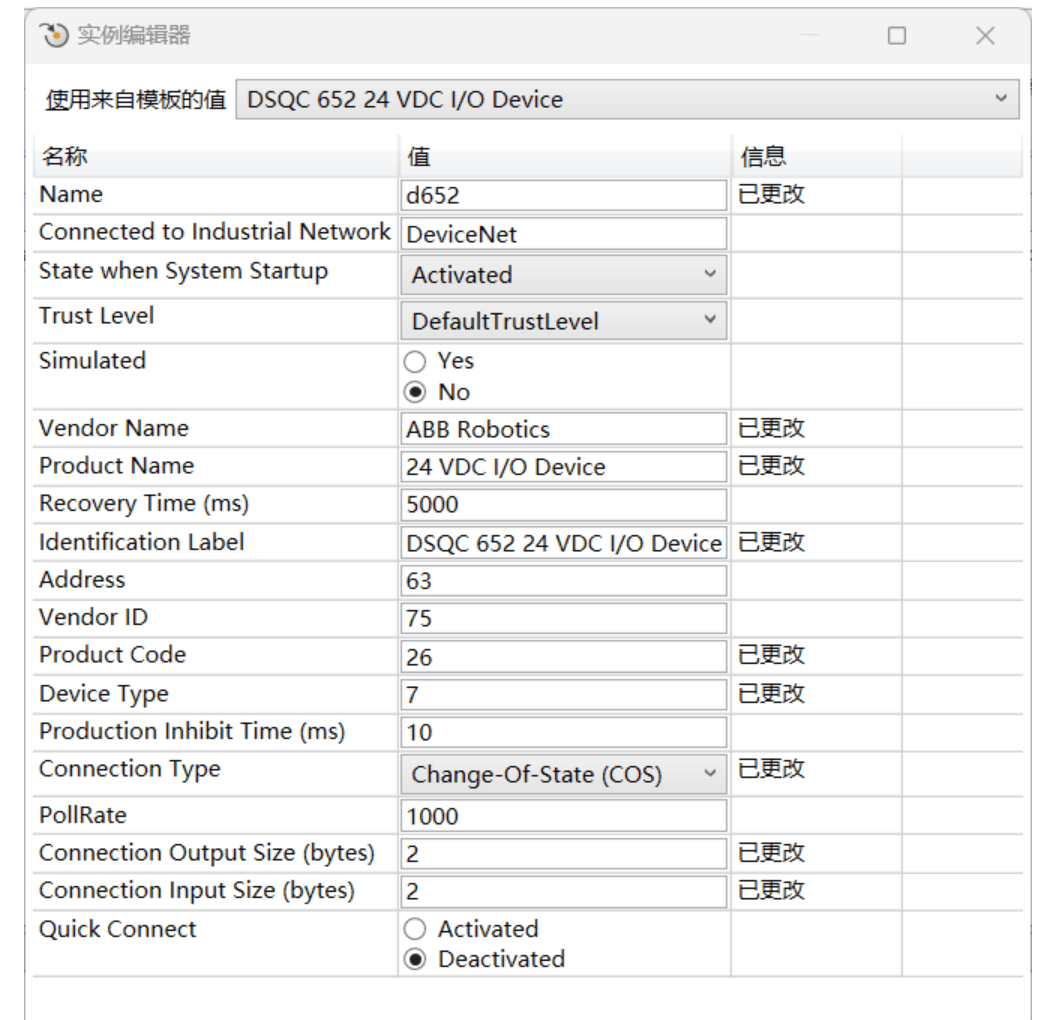
在配置列表中,用戶需修改Name和Address,地址需要根據實際硬件修改。點擊確認I/O板就配置完畢。
ModbusTCP轉Devicenet網關配置
將網關的DeviceNet接口與ABB機器人的DeviceNet端口連接。
將網關的Modbus TCP接口通過以太網連接到控制系統網絡。
確保電源和信號線連接正確,避免松動或接觸不良14。
(2)網關參數配置
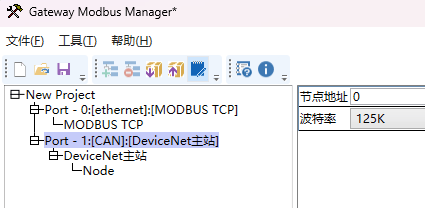
DeviceNet側配置:
設置網關的DeviceNet站地址,確保與機器人配置一致。
配置DeviceNet的波特率(125K、250K、500K),與機器人匹配。
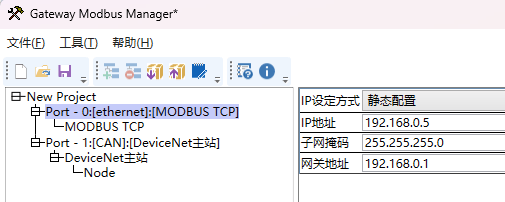
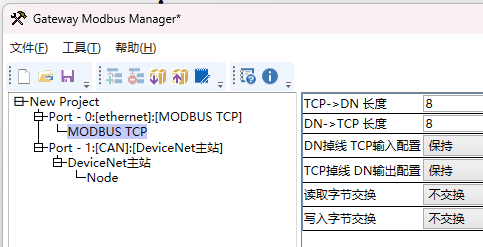
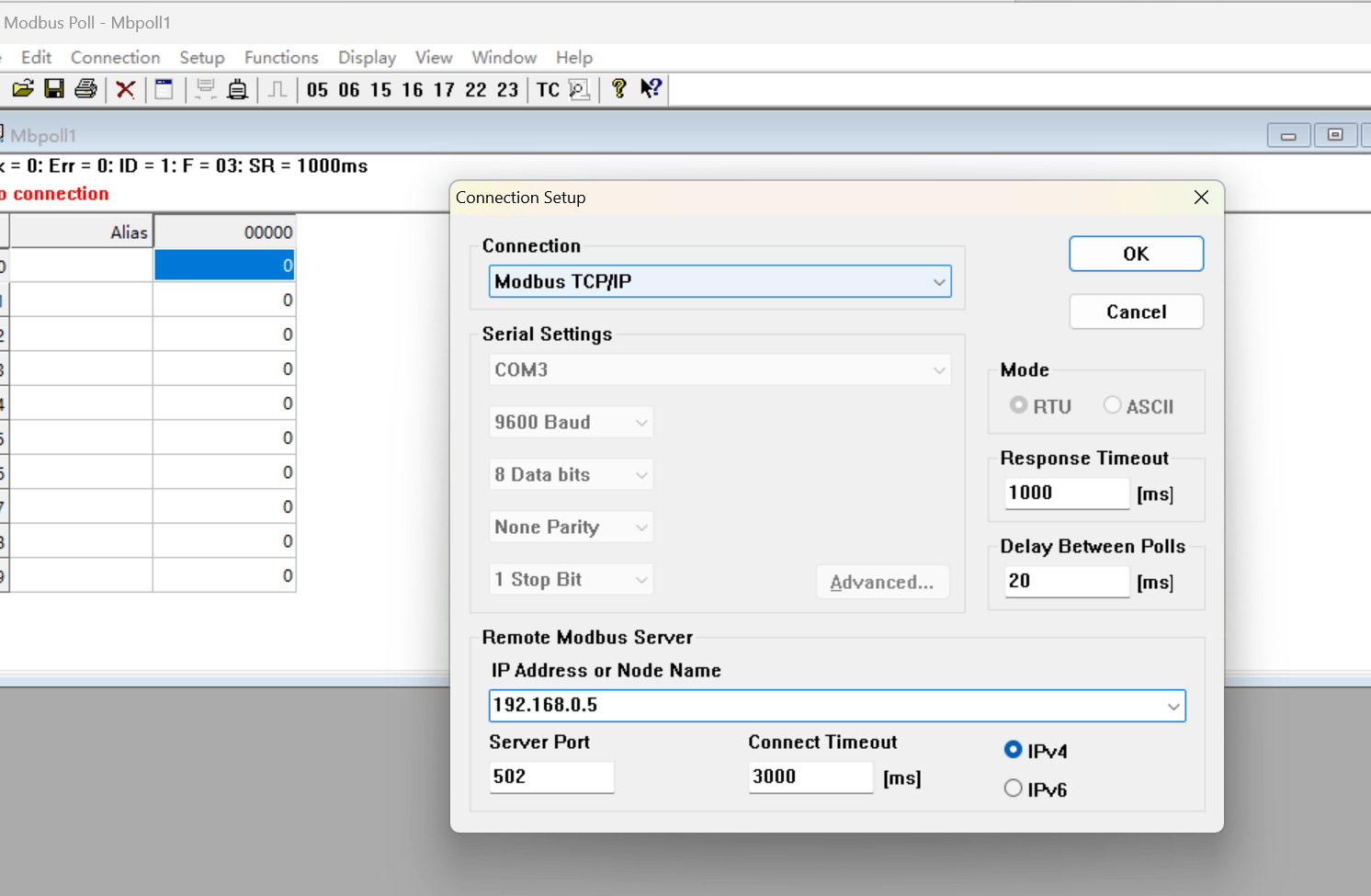
Modbus TCP側配置:
設置網關的IP地址、子網掩碼、網關地址,確保與控制系統網絡兼容。
配置Modbus TCP一側的數據交換長度,字節順序以及掉線后數據處理方式。
(3)數據映射配置
使用網關配置軟件,將ABB機器人的DeviceNet數據地址映射到Modbus
設置完成后,將配置下載進網關即可。
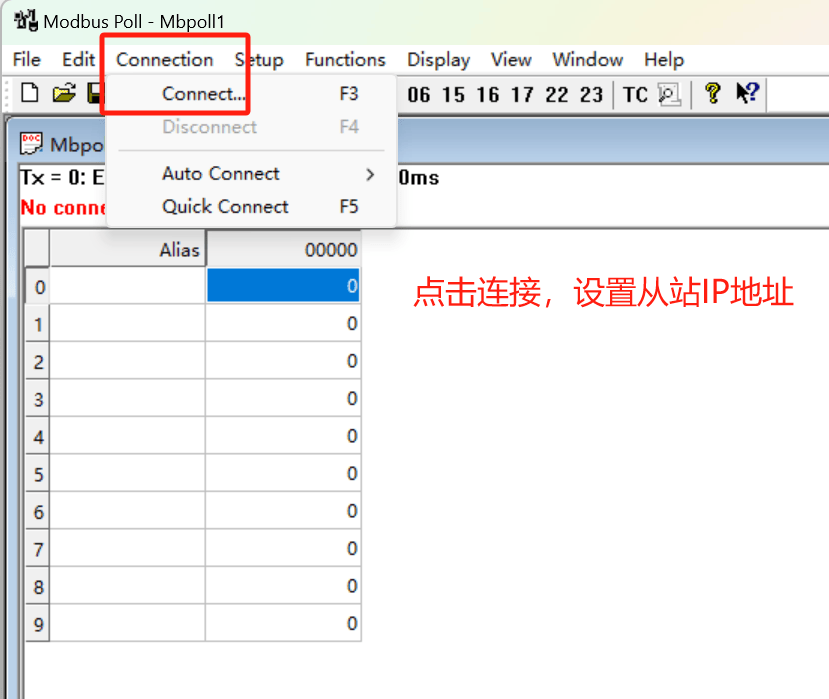
打開Modbus主站軟件“Modbus Poll”
設置完成后,即可通過Modbus主站軟件控制ABB機器人。














![2025年滲透測試面試題總結-天翼電子公司[社招]安全運營崗(題目+回答)](http://pic.xiahunao.cn/2025年滲透測試面試題總結-天翼電子公司[社招]安全運營崗(題目+回答))

之瀏覽器渲染應用及內存釋放的關聯與應用)


)