B站 ?:道傳科技上位機 ? 觀看教程
一、工業鏡頭介紹
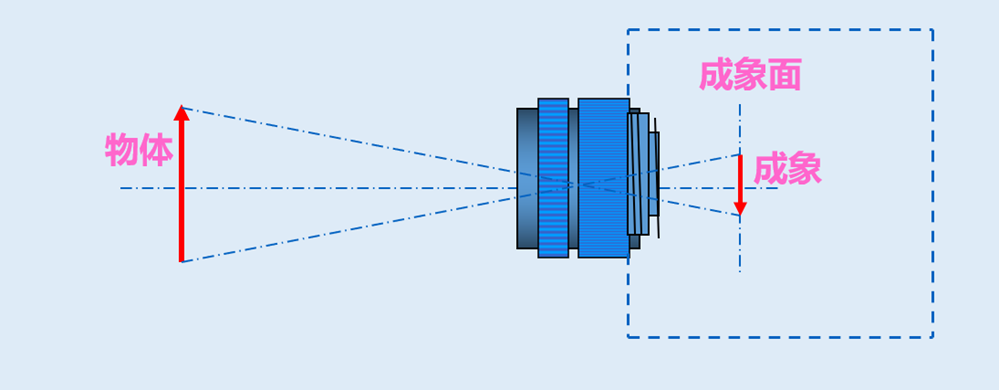
鏡頭的主要作用是
將目標成像在圖像傳感器的光敏面上。
下圖左一的型號為 焦距 50mm? 最大光圈為F1.6 鏡頭的像面尺寸為2/3英寸(最大能夠兼容CCD芯片尺寸)

二、工業鏡頭的分類
鏡頭的主要分類是
按功能分類:定焦鏡頭、變焦鏡頭
按視角分類:標準鏡頭、廣角鏡頭、遠攝鏡頭
按焦距分類:短焦距鏡頭、中焦距鏡頭、長焦距鏡頭
按用途分類:普通鏡頭、微距鏡頭、遠心鏡頭
三、關鍵參數講解
鏡頭工作距離(WD)
????? 一般是指? 鏡頭物方端面 到 被拍攝物體表面 的物理距離。
光源工作距離(LWD)
????? 一般是指? 光源物方端面 到 被照射物體表面 的物理距離。
視場(FOV)
也稱視野,是指能被視覺系統觀察到的物方可視范圍大小
對于鏡頭而言,可觀察到的視場跟鏡頭放大倍率及相機芯片選擇有關。因此通常建議根據被觀察物體的尺寸,先確定所需的視場,再確定相機芯片尺寸及鏡頭放大倍率。在實際工程項目中,考慮到機械誤差等問題,視場通常要大于待觀測物體的實際尺寸,以確保在機械誤差的范圍內,物體始終位于視覺系統的可視范圍內。
光學放大倍率
機器視覺行業里提到的鏡頭光學放大倍率通常是指垂軸放大倍率,即像和物的大小之比,計算方法如下:
光學放大倍率=感光芯片長邊/視野長邊
可見,光學放大倍率和所選相機芯片及所需視場相關。
如:已知相機芯片為2/3英寸(8.8mm*6.6mm),
視場長寬為:10mm* 8mm。
如用長邊計算,放大倍率=8.8mm/10mm=0.88x;
如用短邊計算,放大倍率=6.6mm/8mm=0.825x;
此時應取小的倍率0.825x 作為待選鏡頭的光學放大倍率。否則,短邊視場將不能滿足要求。(若取0.88倍,則短邊視場=6.6mm/0.88x=7.5mm<8mm)
四、關鍵參數講解
相機芯片尺寸
在前面描述放大倍率和鏡頭像面尺寸時都涉及到相機芯片尺寸。通常相機廠商是以英寸的形式表示的,但在實際計算時,需要換算成各邊以毫米為單位的計量方式。
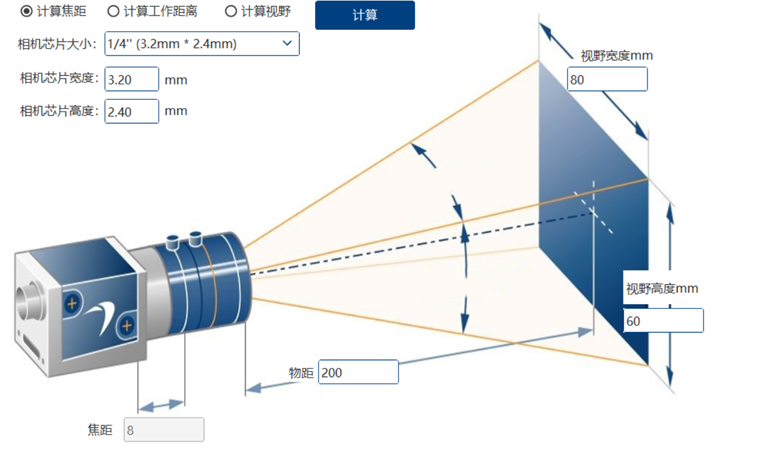
工業鏡頭的焦距(f mm)可以根據FOV(視場), WD(工作距離) 和CCD芯片尺寸計算出來:
焦距計算公式
焦距f = WD × CCD芯片尺寸( h or v) / FOV( H or V)
下面是常見的CCD芯片
1.1英寸——靶面尺寸為寬12mm*高12mm,對角線17mm
1英寸 ——靶面尺寸為寬12.7mm*高9.6mm,對角線16mm
2/3英寸——靶面尺寸為寬8.8mm*高6.6mm,對角線11mm
1/1.8英寸——靶面尺寸為寬7.2mm*高5.4mm,對角線9mm
1/2英寸——靶面尺寸為寬6.4mm*高4.8mm,對角線8mm
1/3英寸——靶面尺寸為寬4.8mm*高3.6mm,對角線6mm
1/4英寸——靶面尺寸為寬3.2mm*高2.4mm,對角線4m
f:鏡頭焦距?? H: FOV高度尺寸? V: FOV寬度尺寸?? WD:鏡頭至景物距離? v:?? CCD芯片寬度尺寸?? h: CCD芯片高度尺寸
五、關鍵參數講解
畸變
鏡頭在成像時,特別是用短焦距鏡頭拍攝大視場,圖像會產生形變,這種情況叫做鏡頭的畸變,這是由于鏡頭的光學結構和成像特性導致的,原因是由于視野中局部放大倍數不一致造成的圖像扭曲。拍攝的視場越大,所用的鏡頭的焦距越短,畸變的程度就越明顯,一般有桶型畸變和枕型畸變兩種,可以通過圖像標定減弱這種平面畸變的影響。
景深
景深則是鏡頭另一個重要的外部參數。它表示滿足圖像清晰度要求的最遠位置與最近位置的差值,景深的計算可能會相對麻煩一些。它與鏡頭焦距、光圈值、工作距離和允許彌散斑的最大直徑有關。由于允許彌散斑的最大直徑是個相對量,它的可接受直徑很大程度上取決于應用,因此在實際視覺應用中以實驗和參考鏡頭給出的參考值為主。
簡單的說:光圈越小,景深越深;焦距越短,景深越深;對焦距離(工作距離)越遠,景深越深;
視場角
以鏡頭為頂點,被測目標物像可通過鏡頭的最大范圍的兩條邊緣構成的夾角,稱為視場角。它決定了光學儀器(如相機、顯微鏡等)的視野范圍。
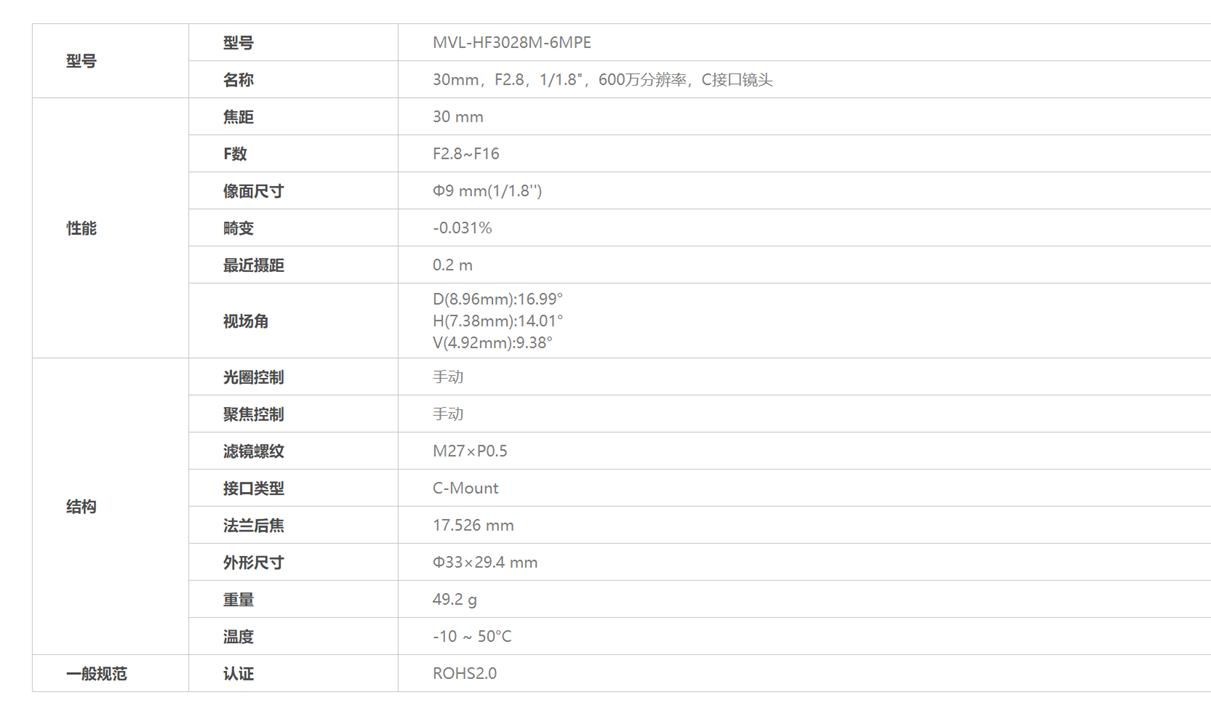
六、鏡頭的詳細硬件參數
七、鏡頭的接口
按接口的不同,鏡頭可分為 C - MOUNT 和 CS - MOUNT 。
( 1) C - MOUNT
?????? C - MOUNT 即 C 接口鏡頭,是目前機器視覺系統中使用最廣泛的鏡頭、具有重量輕、體積小、價廉、品種多等優點,它的接口螺紋參數為:公稱直徑=1英寸,爆距=32牙(1-32UN)。
(2) CS - MOUNT
?????? CS - MOUNT 即 CS 接口,是為新的 CCD 相機而設計的。隨著 CCD 集成度越來越高,相同分辨率的光敏陣列越來越小,設計的 CS - MOUNT 更適用于有效光敏傳感器尺寸更小的相機。
????? 除了普遍的 C 接口和 CS 接口外,還有用于大分辨率面陣相機及線陣相機的 F 接M2接口,M72接口及用于靶面較大或特殊鏡頭的 V 接口。 F 接口是尼康鏡頭的接口標準,又稱尼康口,一般靶面尺寸大約為1英寸的工業相機需要用 F 接口的鏡頭。
????? C 接口和 CS 接口的區別僅僅在于鏡頭的安裝基準面到焦點的距離不同。 C 接口的距離是17.526 mm ,而 CS 接口是12.5mm。它們之間相差約5mm。因此,具有 CS 接口的相機,可以與 C 接口或 CS 接口的鏡頭連接,但使用 C 接口鏡頭時需加裝一個接圈;具有 C 接口的相機只能與 C 接口的鏡頭連接,而不能與 CS 接口的鏡頭連接,否則不但不能獲得良好的聚焦,還有可能損壞 CCD 靶面(部分 C 接口相機可以擰掉接圈轉換成 CS 接口)。但有一個例外,即 C 接口的3CCD相機不能和 C 接口的鏡頭協同工作。
八、遠心鏡頭
遠心鏡頭( Telecentric )主要是為糾正傳統工業鏡頭視差而設計的,它可以在一定的物距范圍內,使得到的圖像放大倍數不會變化,這對被測物體不在同一物面上的情況是非常重要的。遠心鏡頭由于其特有的平行光路設計,一直被對鏡頭畸變要求很高的機器視覺應用場合所青睞。設計遠心鏡頭的目的是消除由于被測物體(或 CCD 芯片)與鏡頭距離不一致,造成放大倍率不同的影響。
遠心鏡頭的選擇
??????? 遠心鏡頭和相機的匹配選擇原則和普通工業鏡頭相同,只要其鏡頭的規格大于或等于相機的靶面即可。使用過程中需注意,在遠心鏡頭的物鏡垂直下方區域內的像都是遠心成像,而超出此區域的像就不是嚴格意義上的遠心成像了,這點在實際的使用中一定要注意,否則會產生不必要的偏差。基于遠心鏡頭的原理特征及獨特優勢,在以下六種情況下,最好選用遠心鏡頭:
(1)需要檢測有厚度的物體(厚度>FOV直徑/10)
(2)需要檢測不在同一平面的物體。
(3)物體到鏡頭的距離未知。
(4)需要檢測帶孔徑的三維物體。
(5)需要低畸變率且圖像的亮度完全一致。
(6)缺陷只在同一方向平行照明下才能檢測到。
?????? 根據使用情況(物體尺寸和需要的分辨率)選擇物方尺寸(拍攝范圍)合適的物方鏡頭和 CCD 或 CMOS 相機,同時結合像方尺寸(使用 CCD 的靶面大小)即可計算出放大倍數,然后選擇合適的像方鏡頭。在選擇過程中,還應注意景深指標的影響,因為像/物倍數越大,景深越小。為了得到合適的景深,可能還需要重新選擇鏡頭。
九、選型案例
案例分析:
已知條件:工業相機型號已經選擇好,具體參數:工業相機芯片尺寸為2/3",C接口,5百萬像素;
視野是100*100mm, 工作距離:500mm;
根據以上條件,我們來選擇合適的工業鏡頭;
鏡頭接口:?????? ? 首先工業鏡頭要和工業相機接口一致,所以這里也選擇C接口;
鏡頭大小:????? ? 遵循鏡頭大小要大于相機的芯片大小,所以這里鏡頭尺寸最少支持2/3";
鏡頭分辨率:? ? 鏡頭的分辨率要高于相機的分辨率,所以選擇5百萬像素以上;
焦距:??????????????? ? 500(工作距離)× 8.8(芯片水平長度)/ 100(視野)=44mm;
鏡頭放大倍率:? 8.8(芯片水平長度)/ 100=0.088
B站? :道傳科技上位機? ?觀看教程視頻


![2025年滲透測試面試題總結-天翼電子公司[社招]安全運營崗(題目+回答)](http://pic.xiahunao.cn/2025年滲透測試面試題總結-天翼電子公司[社招]安全運營崗(題目+回答))

之瀏覽器渲染應用及內存釋放的關聯與應用)


)








算法類cv::cuda::OpticalFlowDual_TVL1)


