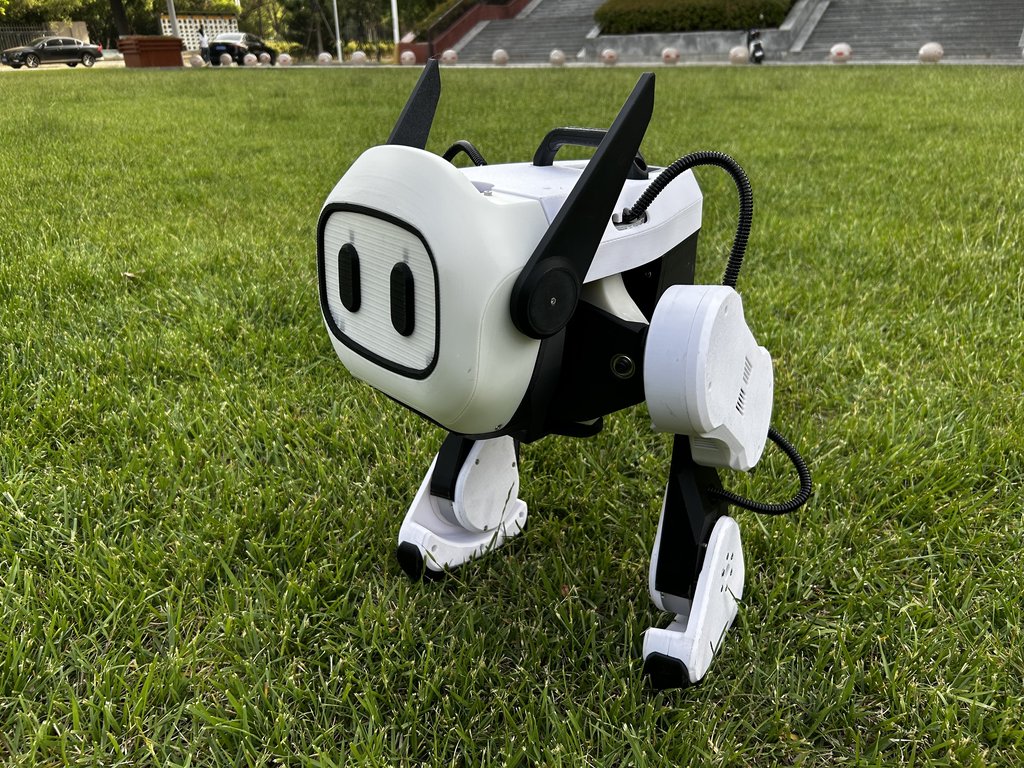
Unitree Qmini 是一款由宇樹科技設計并開源的低成本雙足機器人,開發者可以完全通過 3D 打印進行復刻。Qmini 專為業余愛好者、教育工作者和研究人員設計,使用戶能夠快速上手,并以類似樂高的模塊化方式組裝自己的機器人。該項目為機器人技術提供了一個便捷且經濟的切入點,加速創新,并為全球機器人生態系統的發展做出貢獻。
Qmini 秉承“優秀工具應該易于使用”的理念,在構建時充分考慮了簡潔性和成本效益。因此該平臺支持一系列經濟實惠的控制板,并以 樹莓派(Raspberry Pi 4 Model B)作為默認參考板。開發者可以根據具體需求或項目自由選擇其他控制器。
軟硬件完全開源
Hardware: 硬件:
- 提供完整的物料清單(BOM)
- 提供電氣系統框圖
- 提供 DIY 制作說明
機械結構:
- 提供所有機械部件的 STEP 文件
- 提供裝配 SOP(標準操作程序)
Software: 軟件:
- URDF 模型
- 核心軟件堆棧:RoboTamer4Qmini
STEP (或 STP)是一種用于存儲和傳輸三維和二維幾何模型、零件和設計數據的文件格式,是計算機輔助制造(CAM)和計算機輔助設計(CAD)軟件的常用格式。
URDF(全稱 Unified Robot Description Format)是一種用于描述機器人模型和機器人外部環境的 XML 格式文件,在 ROS(機器人操作系統)中廣泛使用,比如在 Rviz 可視化工具中顯示模型,或者在 Gazebo 仿真環境中進行仿真。
制作說明
得益于全面的開源資源,開發者可以輕松獲取所有必需的組件。Qmini 的所有機械結構均可 3D 打印,幾乎無需定制加工。機身主體零部件打印參數建議如下表所示。
| 零件 | 材質 | 墻層數 | 頂部殼體層數 | 底部殼體層數 | 稀疏填充密度 | 稀疏填充圖案 |
|---|---|---|---|---|---|---|
| 機身頂部主架 | PLA | 4 | 4 | 4 | 20 | 蜂窩 |
| 機體主骨架 | PLA | 5 | 5 | 5 | 20 | 蜂窩 |
| 機體前端風扇安裝件 | PLA | 5 | 5 | 5 | 20 | 蜂窩 |
| 電池倉 | PLA | 3 | 3 | 3 | 15 | 網格/蜂窩 |
| 電池底部支撐件 | PLA | 3 | 3 | 3 | 15 | 網格/蜂窩 |
| 腿部 yaw 軸限位塊 | PLA | 5 | 5 | 5 | 20 | 蜂窩 |
| 頂部 yaw 軸電機安裝座 | PLA | 4 | 4 | 4 | 20 | 蜂窩 |
| 頂部陀螺儀安裝座 | PLA | 3 | 3 | 3 | 15 | 網格/蜂窩 |
| 樹莓派安裝座 | PLA | 3 | 3 | 3 | 15 | 網格/蜂窩 |
打印完成后,使用宇樹高可靠性的 8010 電機和標準電池組,僅需 3-5 小時即可完成所有部件的組裝。

Qmini 機器人集成了 11 個 Unitree 8010 電機 —— 這是一種經過驗證的執行器,可用于各種商業機器人平臺。其中:
- 10 個電機驅動機器人的主要運動系統
- 1 個電機 位于機器人頸部,作為定制擴展預留
這種模塊化鼓勵開發者設計和制作自己的擴展原型,增強 Qmini 機器人的功能、美觀性或交互性。
電氣連接
Qmini 機器人的電機通訊線由樹莓派主板 USB3.0 接口經 Type-A 轉 Type-C,接入 485 轉接板。
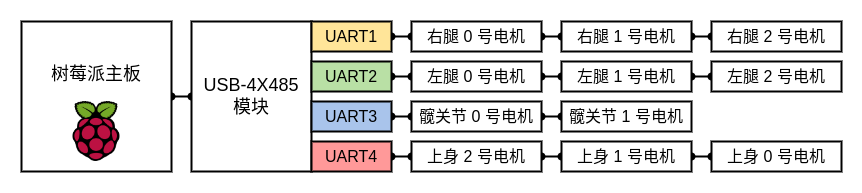
其中:
- 轉接板
UART1接出 485A/B 雙絞,至右腿 0 號電機,右腿 0 至右腿 1 號電機,右腿 1 至右腿 2 號電機,形成 USB 總線 UART1。 - 轉接板
UART2接出 485A/B 雙絞,至左腿 0,左腿 0 號電機至左腿 1 號電機,左腿 1 號電機至左腿 2 號電機,形成 USB 總線 UART2。 - 轉接板
UART3接出 485A/B 雙絞,至髖關節 0 號電機, 髖關節 0 號電機至髖關節 1 號電機,形成 USB 總線 UART3。 - 轉接板
UART4接出 485A/B 雙絞,至上身 2 號電機; 上身 2 號電機至上 1, 上身 1 號電機至上身 0 號電機,形成 USB 總線 UART4。
另外,開發板散熱風扇電源由開發板 GPIO2(正極 5V)和 GPIO14(GND)引腳輸出 5V 對外供電。
應用場景
Qmini 適用于多種場景和人群,例如:
- 個人愛好者 —— 在家 3D 打印、組裝和編程自己的機器人
- STEM 教育 —— 非常適合機器人競賽、實驗室實驗和畢業項目
- 研究機構 —— 用于測試動態步態、運動控制和人工智能算法的緊湊型平臺
- 互動娛樂 —— 準備在動畫、舞臺表演或其他創意科技體驗中表演
相關鏈接
- 宇樹科技官網
- Qmini 倉庫(GitHub)
- RoboTamer4Qmini 倉庫(GitHub)









)
![[論文閱讀]TrustRAG: Enhancing Robustness and Trustworthiness in RAG](http://pic.xiahunao.cn/[論文閱讀]TrustRAG: Enhancing Robustness and Trustworthiness in RAG)







)
![[Java惡補day22] 240. 搜索二維矩陣Ⅱ](http://pic.xiahunao.cn/[Java惡補day22] 240. 搜索二維矩陣Ⅱ)