一、運行方式 ?
1. 頻譜監測與信號識別 ?
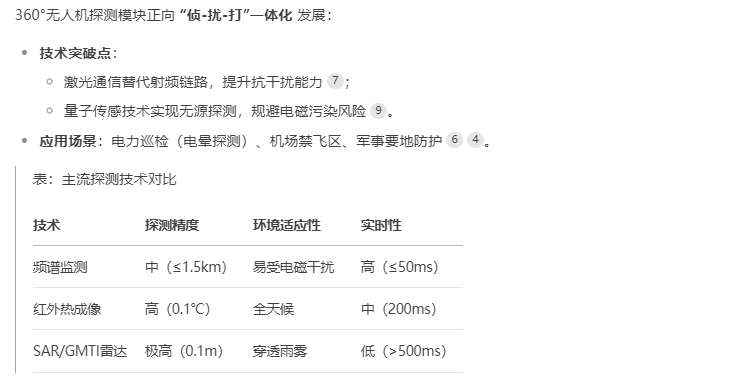
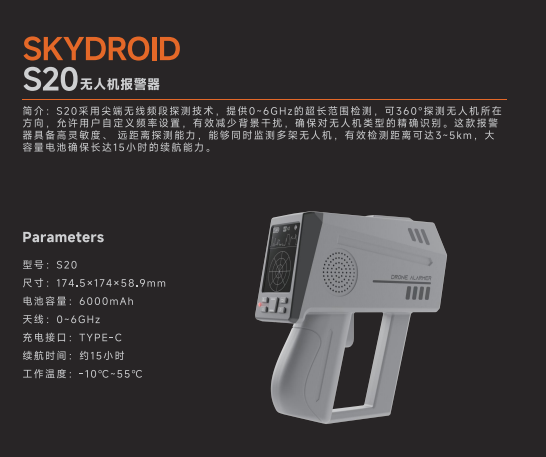
全頻段掃描:模塊實時掃描900MHz、1.5GHz、2.4GHz、5.8GHz等無人機常用頻段,覆蓋遙控、圖傳及GPS導航信號。 ?
多路分集技術:采用多傳感器陣列,通過信號加權合并提升信噪比,精確定位無人機位置(誤差≤1.5km)。 ?
2. 光電與雷達協同探測
紅外熱成像:搭載高靈敏度紅外探測器,穿透煙霧/黑夜識別無人機熱源,并聯動可見光攝像頭進行目標復核。 ?
合成孔徑雷達(SAR):在復雜氣象條件下實現0.1米級高分辨率成像,結合GMTI模式追蹤慢速移動目標(速度≥1英里/小時)。 ?
3. 智能決策與反制聯動
偵測到目標后,系統自動觸發干擾模塊: ?
電磁壓制:發射定向射頻干擾,切斷無人機導航及控制鏈路,迫使其懸停、返航或迫降。 ?
物理攔截(可選):高能激光炮對軍用級無人機實施硬摧毀。 ?
二、技術要點 ?
1. 多頻段協同探測 ?
頻段覆蓋:需兼容消費級(2.4GHz/5.8GHz)與工業級(1.5GHz/5.1GHz)無人機信號,覆蓋95%以上機型。 ?
抗干擾設計:采用超窄帶濾波抑制環境噪聲,提升信噪比。 ?
2. 高精度定位與跟蹤 ?
傳感器融合:結合光流測距、慣性導航及GPS數據,實現無GPS環境下的室內定位。 ?
時空多維融合:通過時間/空間濾波算法消除誤報,實時輸出目標軌跡。 ?
3. 自適應干擾策略
分級反制:根據威脅等級選擇干擾模式。 ?
導航欺騙:模擬GPS信號誘導無人機偏離航線,避免墜落風險。 ?
三、技術難點 ?
1. 復雜環境適應性
城市多徑效應:建筑反射導致信號定位漂移,需優化MIMO雷達波束成形算法。 ?
電磁兼容性(EMC):強電磁環境下易受干擾,需冗余交錯驅動布局設計。 ?
2. 系統集成與實時性
多源數據融合延遲:SAR圖像處理、紅外熱成像及頻譜分析需低延遲(<100ms),對邊緣算力要求極高。 ?
功耗與散熱:高功率干擾模塊易導致設備過熱,需輕量化散熱設計(如凱茉銳紅外模組的低功耗方案)。 ?
3. 智能識別與誤報抑制
AI模型泛化:需訓練大量數據集區分無人機與鳥類/風箏,且在夜間/霧天維持高準確率。 ?
動態目標追蹤:低速無人機(<3m/s)在GMTI模式下易漏檢,需提升DMTI算法靈敏度。 ?
四、總結與趨勢 ?





)





)

缺省的運行時組件檢視器)





