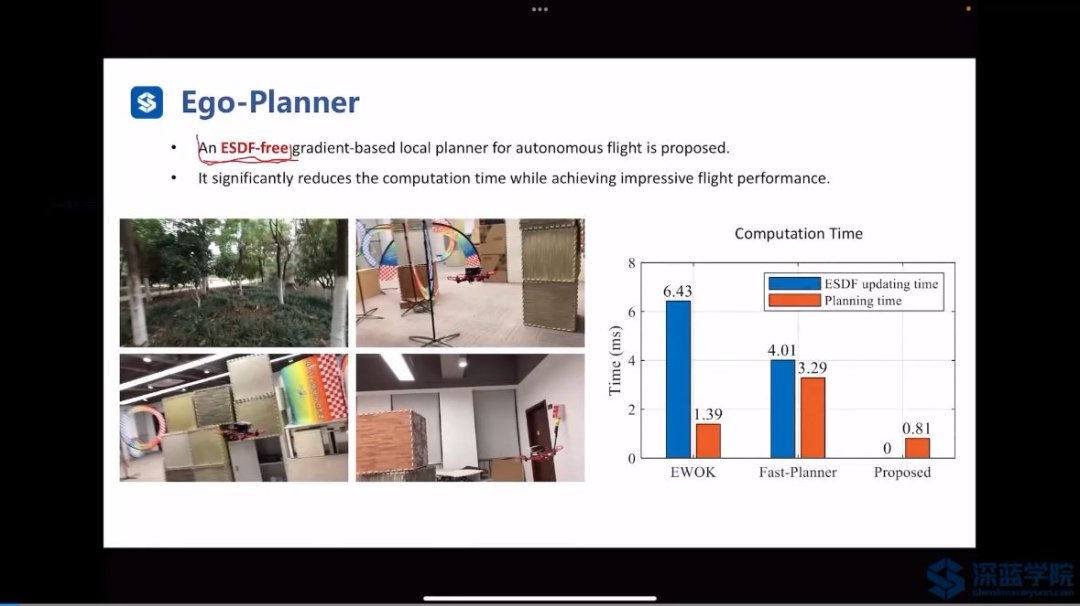
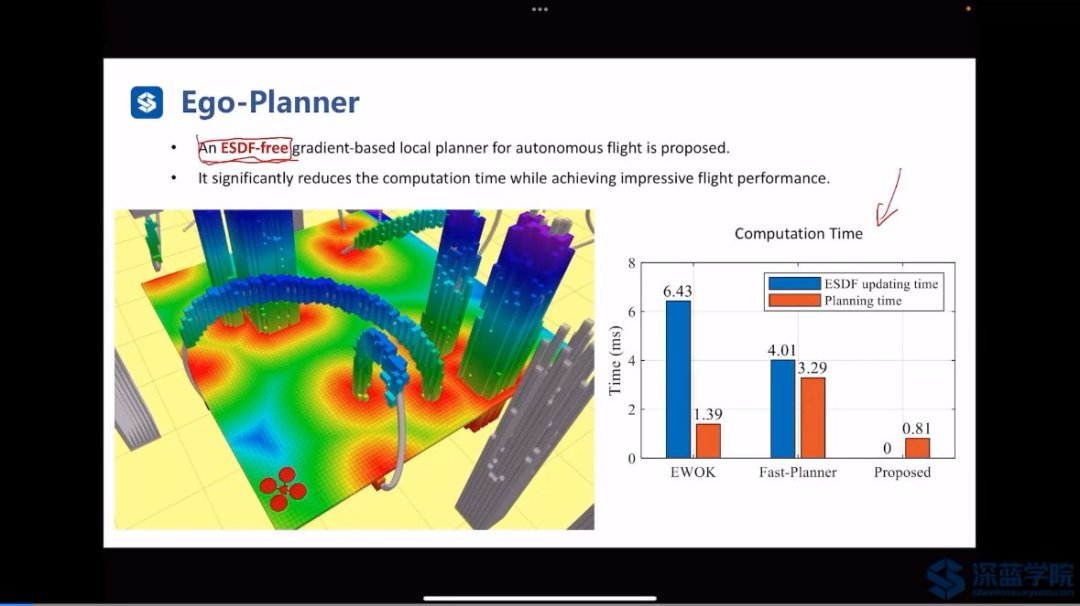
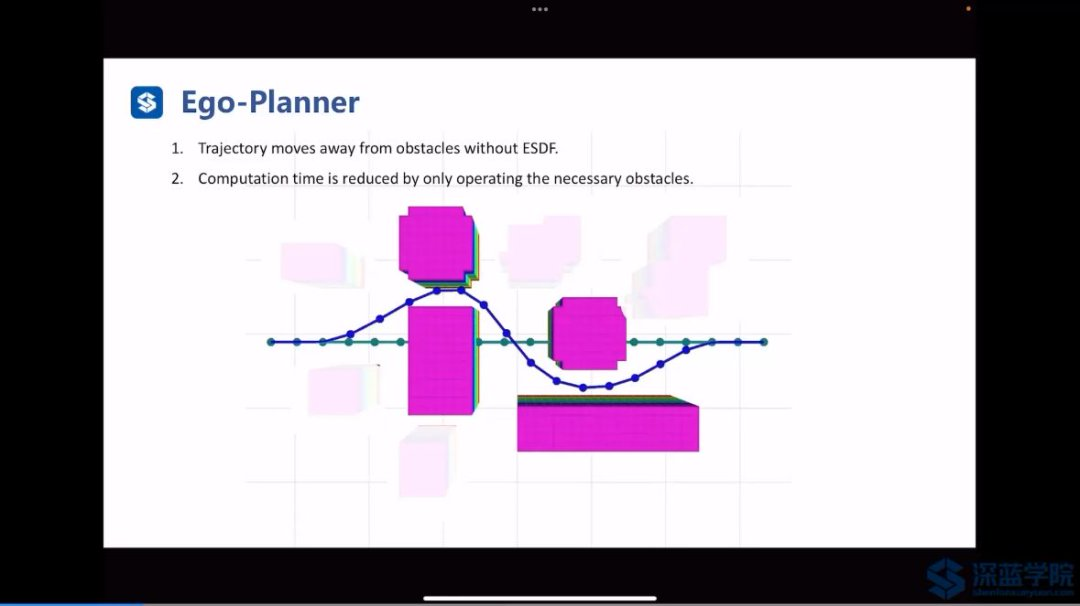
ESDF-free:
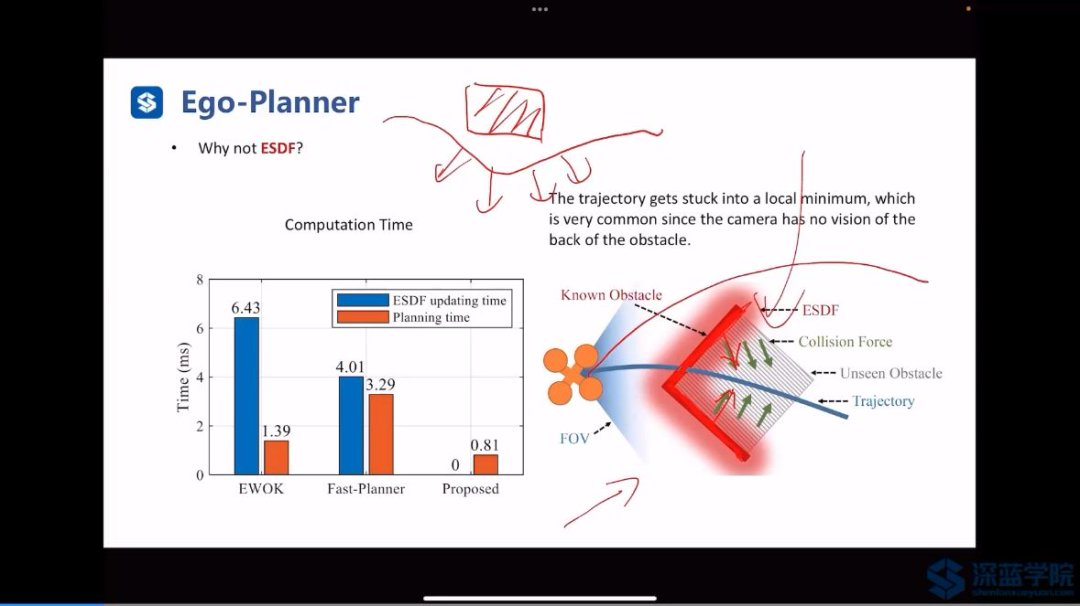
 被這種類型的障礙物死死卡住的情況:
被這種類型的障礙物死死卡住的情況:
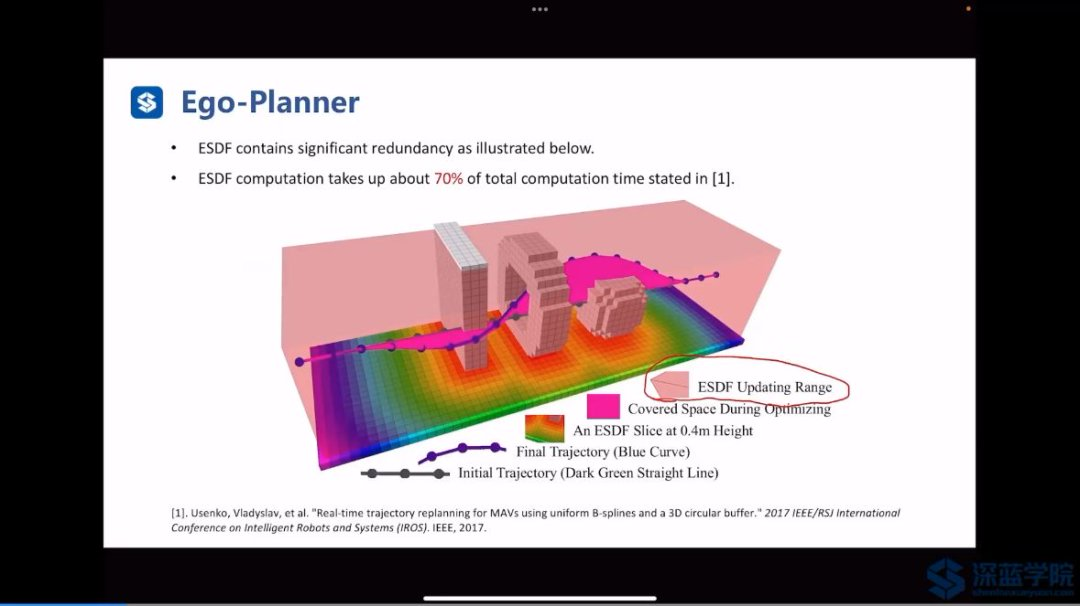
在一定范圍內建立ESDF:
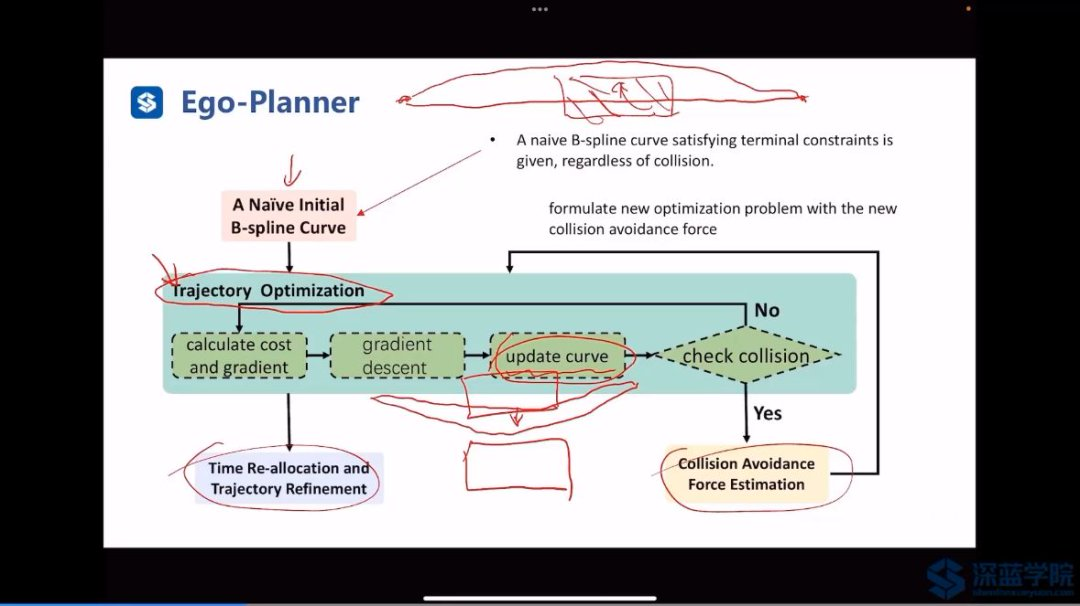
Ego-Planner框架:
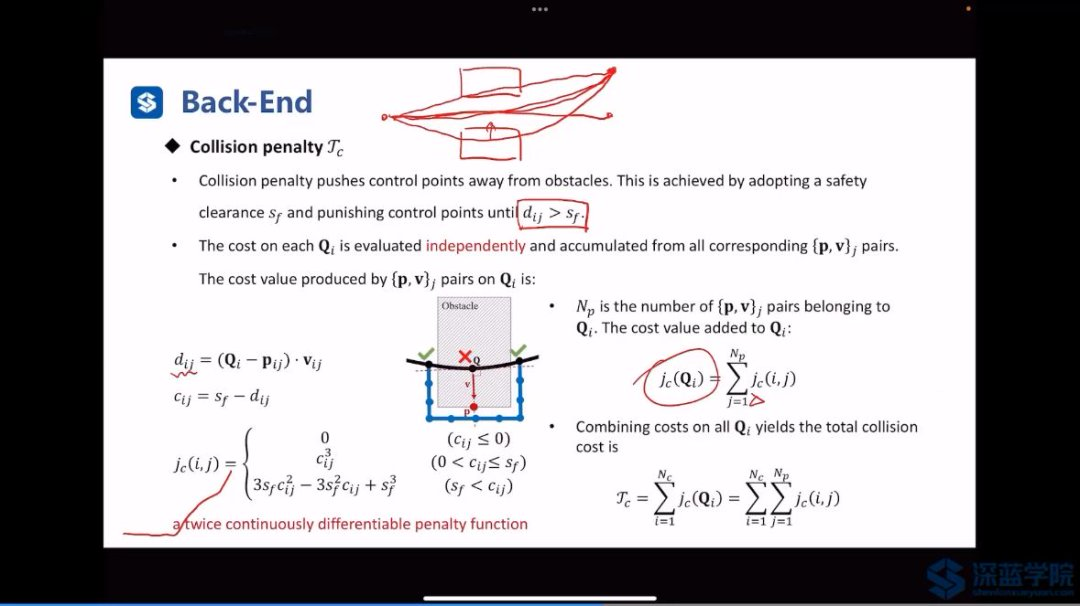
找到{p,v} pair:
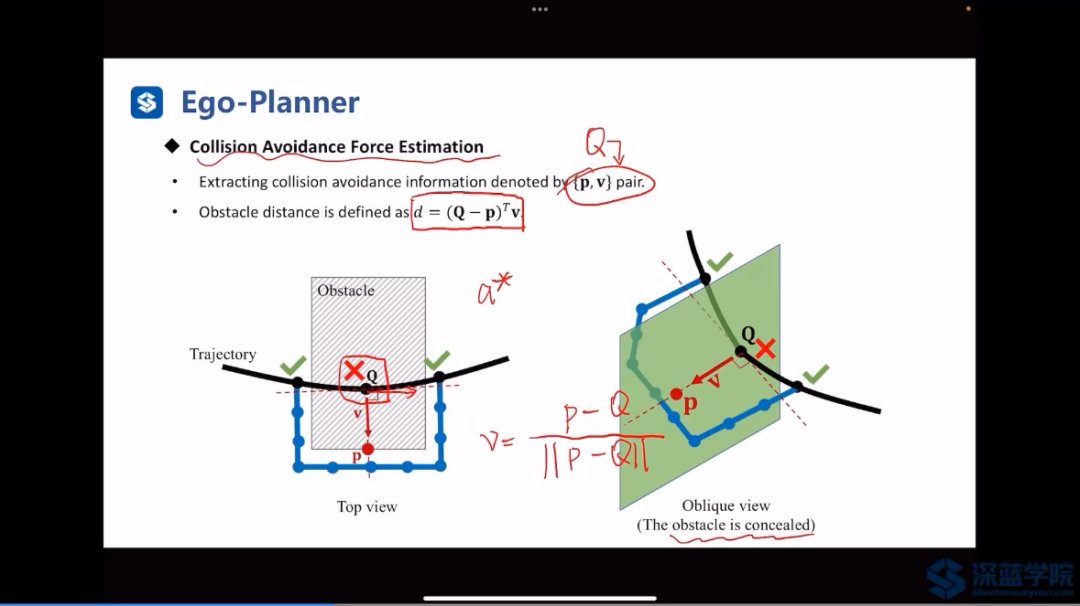
【注意】:首先根據在障礙物內航跡上的點Q,以及與它相鄰但不在障礙物內的兩個點,假設從左往右進行飛行,左邊點為起點,右邊點為終點,通過A*算法求出一條不經過障礙物的藍色范圍航跡,然后取Q點此時的速度方向,通過速度方向求到在Q點的法向平面與障礙物的交點為p,其單位方向向量為v,這兩個{p,v}就叫對pair,此時這個d就叫做障礙物安全距離。控制好安全距離即可安全避障。
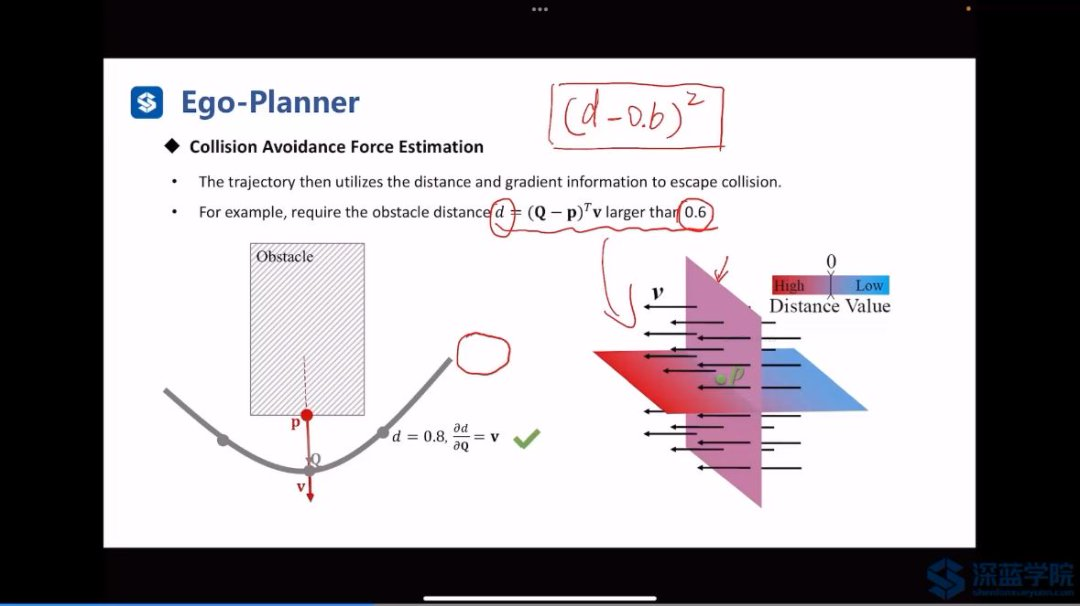
通過設置將障礙物距離設置為優化函數進行求解:
基于梯度的航跡優化:
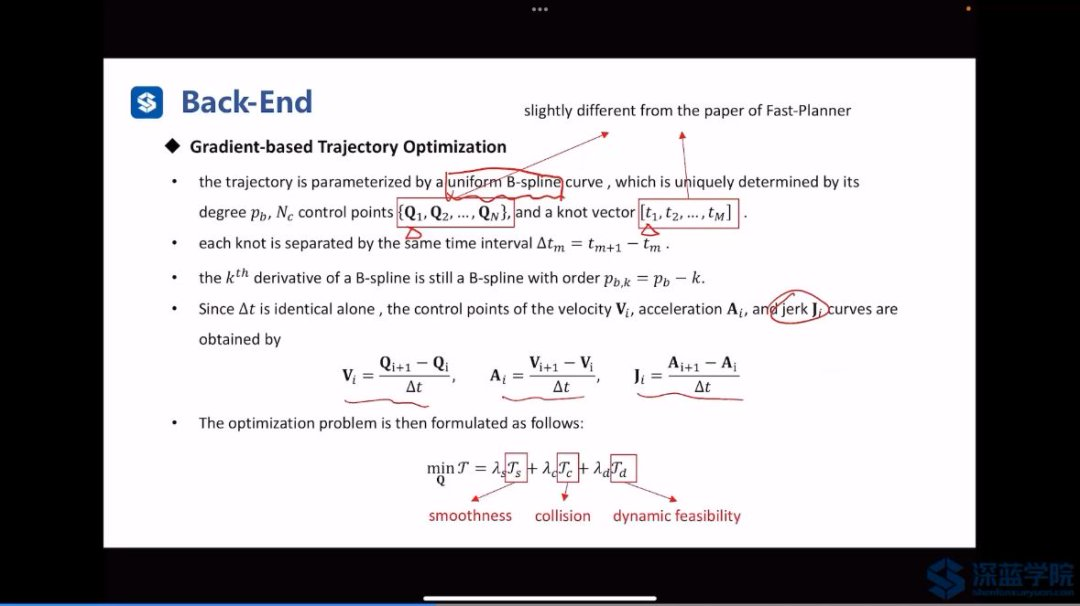
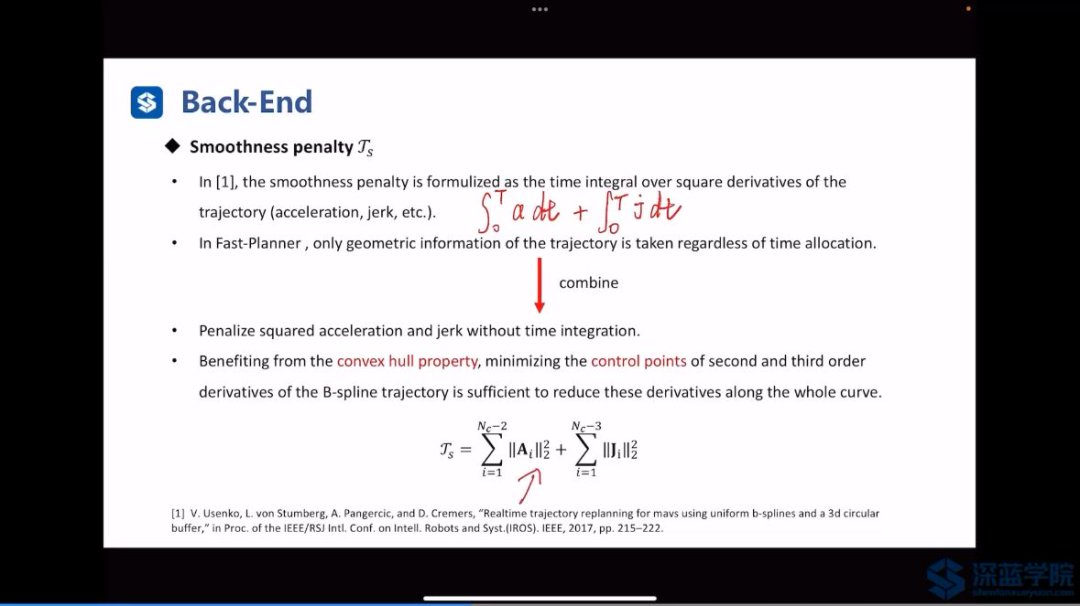
平滑性懲罰:
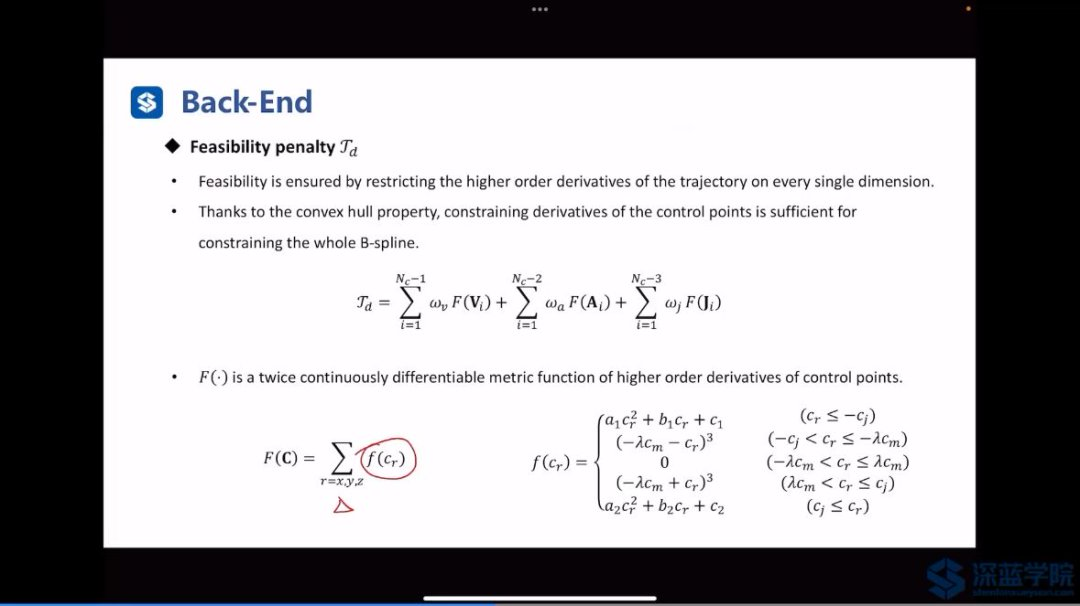
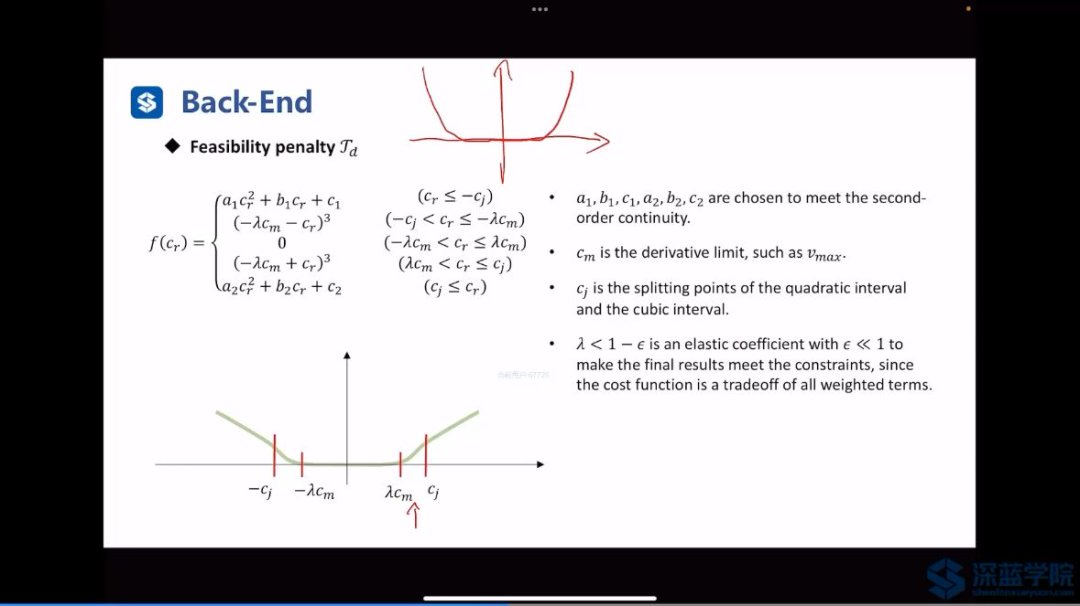
動力學可行性懲罰:
障礙物避障懲罰:
Ego Planner與Fast Planner之間的區別:
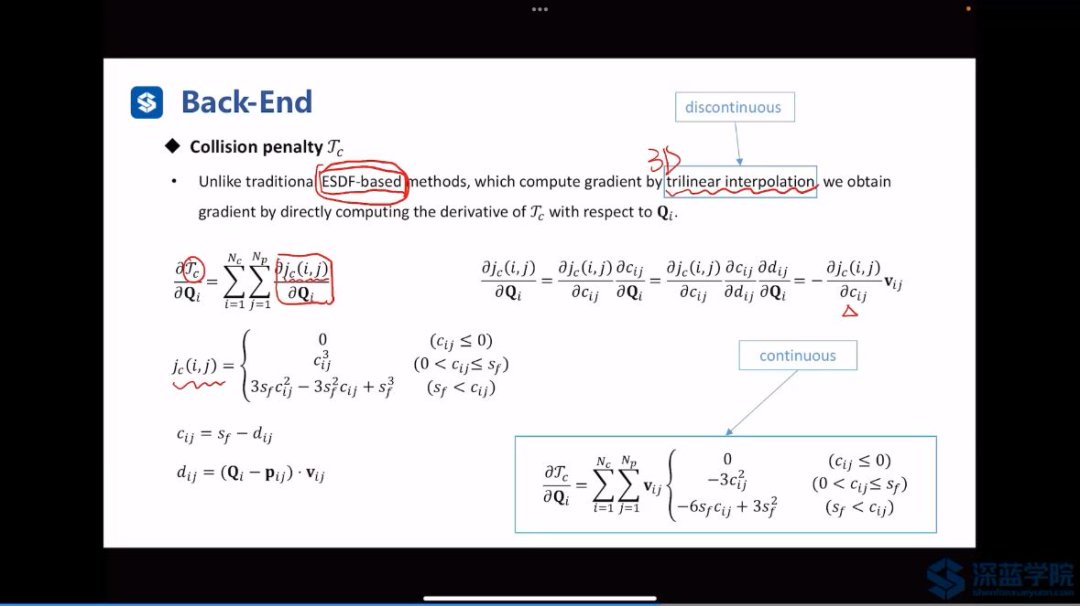
【注意】:無需ESDF地圖進行3D三線性插值,現在的避障方式時間短,且是連續的。
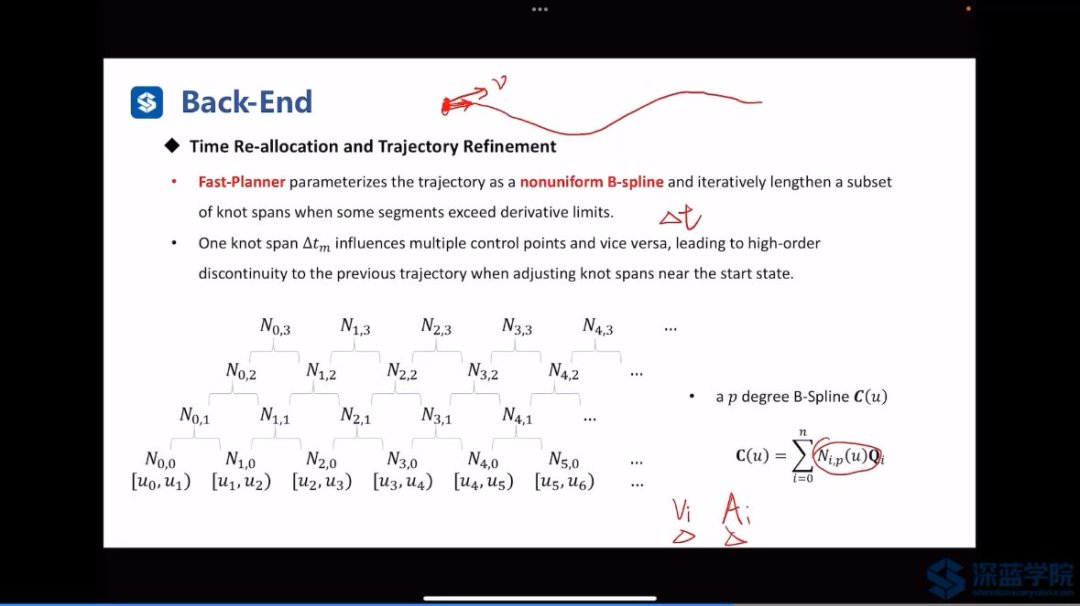
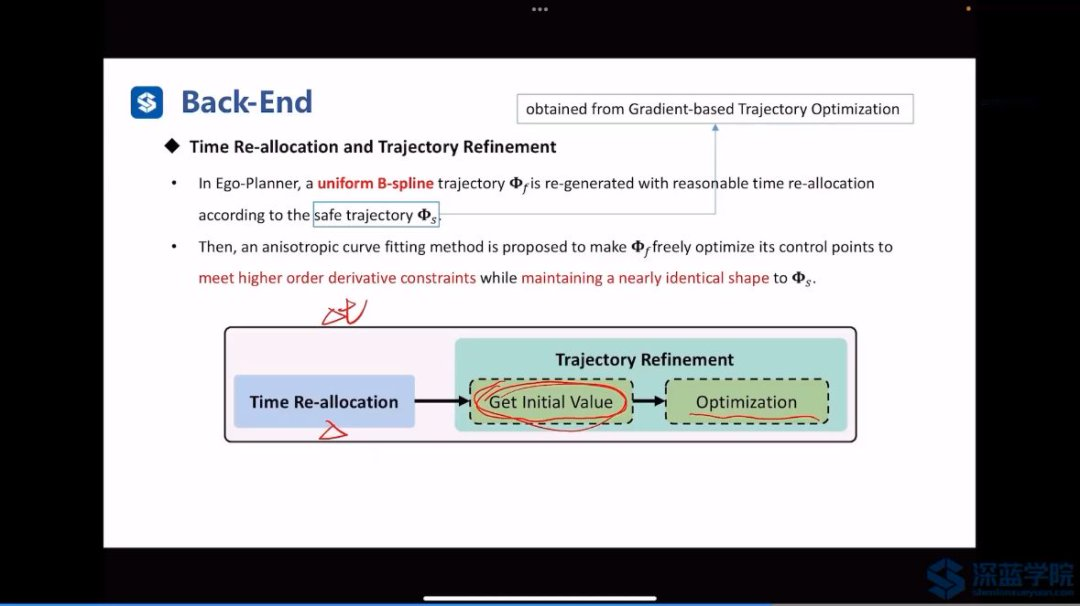
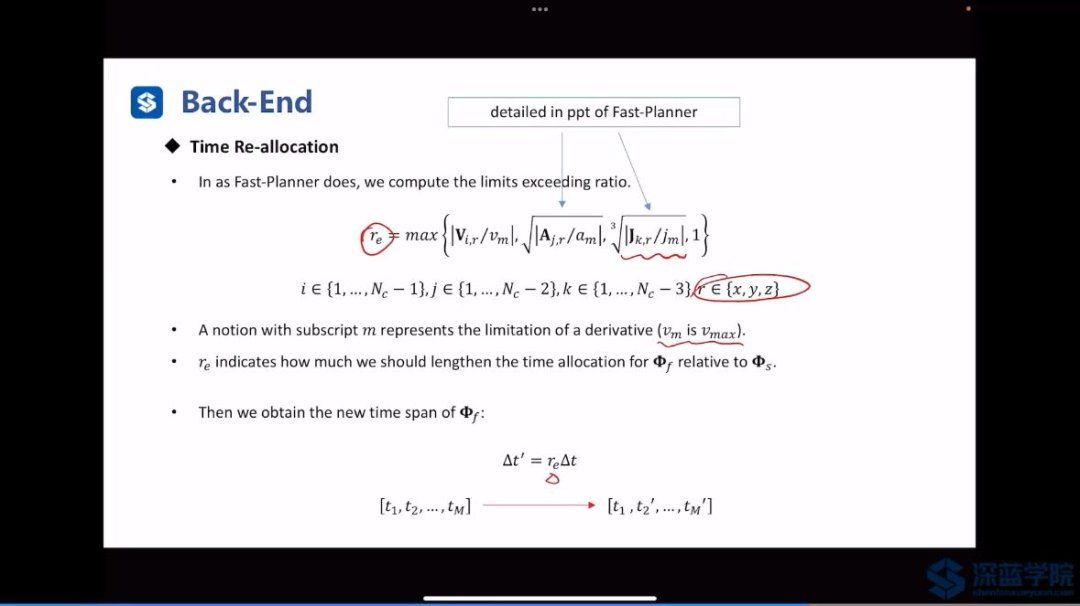
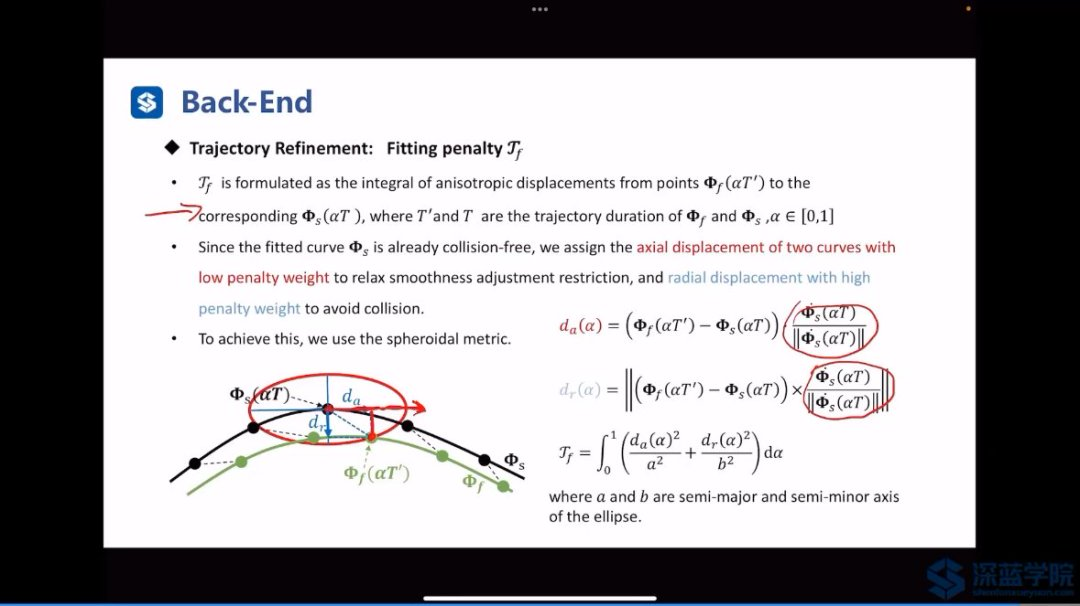
時間重分配與航跡優化:
時間重分配完,找到優化初值,然后再進行優化:
時間重分配讓 變長:
變長:
航跡優化:初值
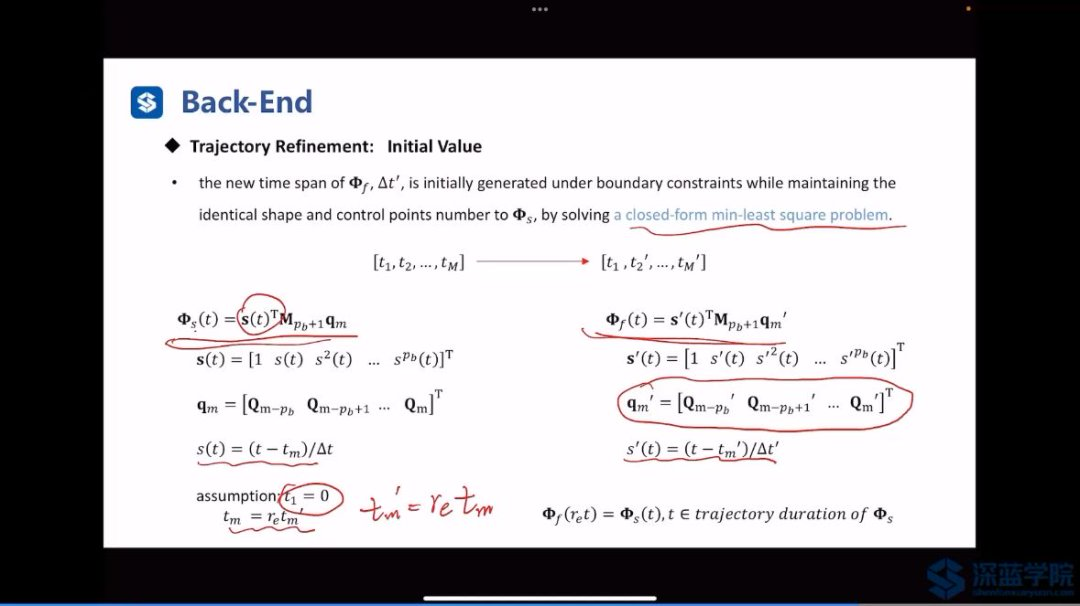
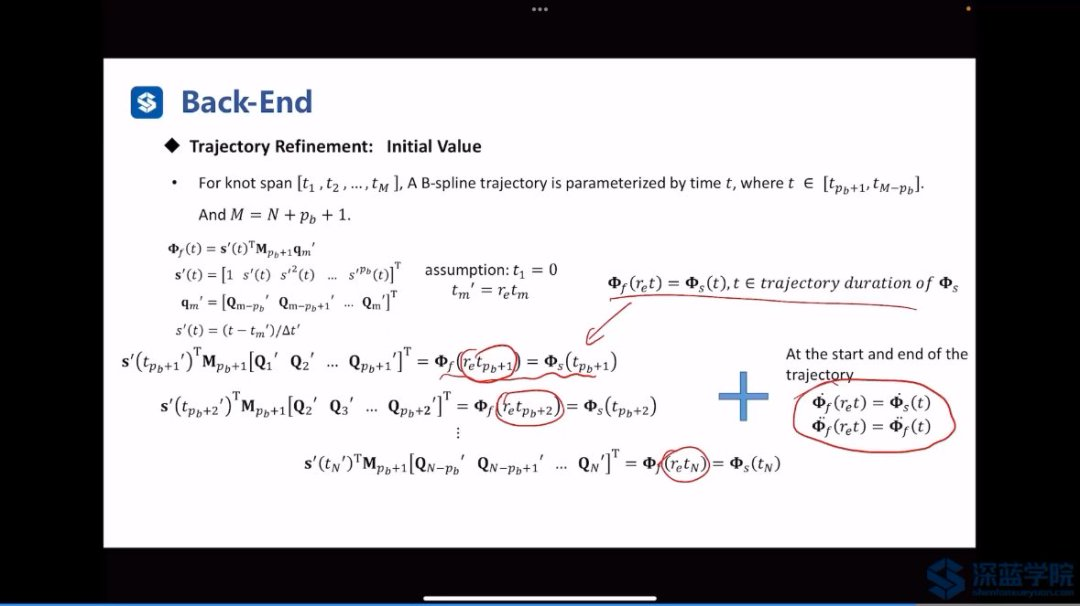
新軌跡在新時間上的軌跡與原軌跡在原時間上的軌跡相同:
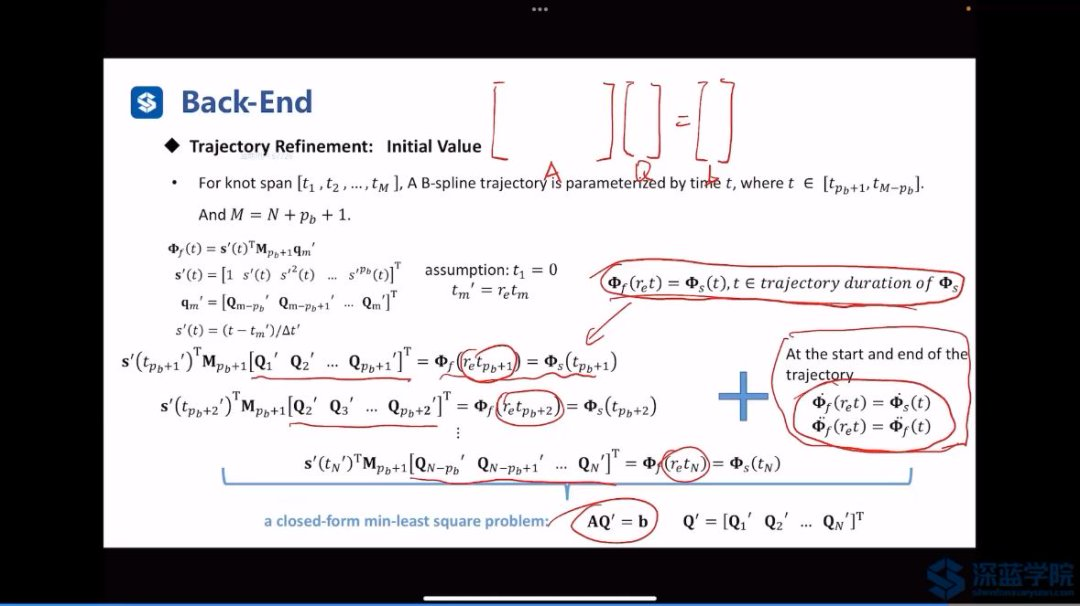
【注意】:用最小二乘進行求解。
優化問題:
原軌跡已經考慮了避障的要求,只需要在速度方向一致的位置進行優化:


,核,線程塊(threadblock),線程,網格(?gridDim),塊(block)和多gpu設備同步數據概念)



)



——應用層)





)

)
