目錄
1、裸機編程
2、實時操作系統
3、移植裸機程序到RTOS的步驟
步驟1:分析裸機代碼
步驟2:選擇并設置RTOS環境
步驟3:設計任務架構
步驟4:實現任務間通信
步驟5:處理硬件交互
步驟6:測試和調試
在嵌入式系統開發中,裸機編程和實時操作系統(RTOS)是兩種常見的方法。裸機編程通過直接操作硬件提供最大控制權,適合資源受限的簡單應用。然而,隨著系統復雜性增加,裸機代碼的維護和擴展變得困難。RTOS通過任務調度、通信和同步機制簡化了多任務管理,特別適合需要實時性能或多功能協調的應用。

1、裸機編程
裸機編程是指在沒有操作系統支持的情況下,直接與MCU硬件交互。開發者通過操作內存映射的寄存器控制外設,通常采用“超級循環”結構,在主循環中順序執行任務。中斷用于處理異步事件,如定時器溢出或外部輸入。
int main(void) {init_hardware(); // 初始化硬件while (1) {task1(); // 執行任務1task2(); // 執行任務2task3(); // 執行任務3}
}這種方法簡單直接,但在多任務或實時場景下,任務調度和資源管理需手動實現,可能導致代碼復雜且難以調試。
2、實時操作系統
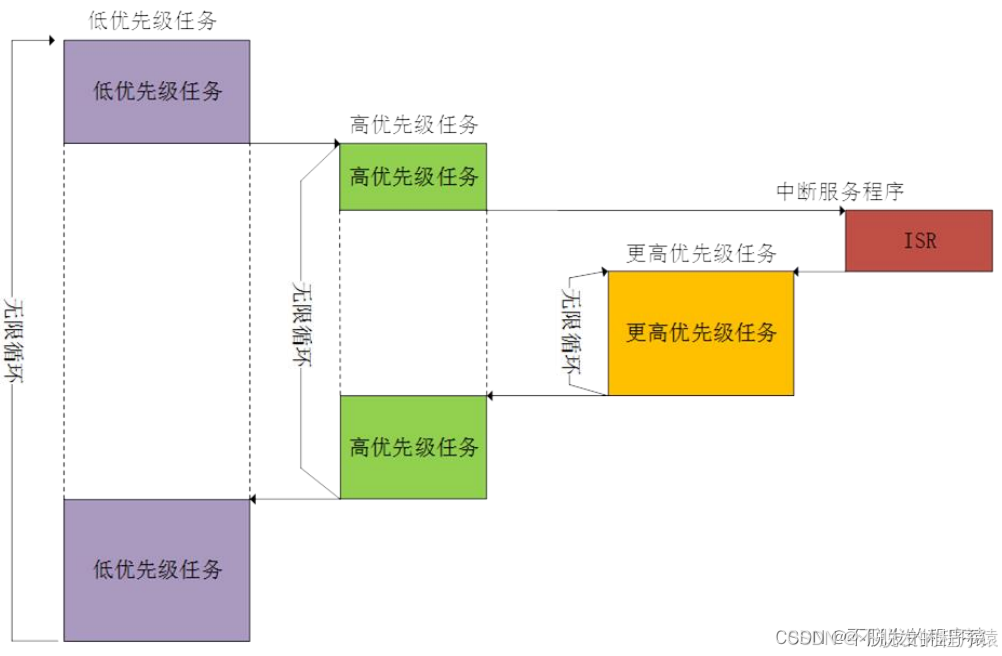
RTOS是為實時應用設計的操作系統,能夠保證任務在指定時間內完成。它通過任務管理、調度和通信原語支持多任務并發運行。每個任務是一個獨立的執行線程,擁有自己的堆棧和優先級,RTOS調度器根據優先級決定任務執行順序。
移植到RTOS在以下場景中尤為有益:
- 復雜應用:系統需同時處理多個功能,如傳感器數據采集、用戶交互和通信。
- 實時需求:任務有嚴格的時序要求,如工業控制或醫療設備。
- 模塊化開發:需要提高代碼可維護性和可重用性。
- 跨平臺移植:RTOS的標準化API支持代碼在不同MCU間遷移。
然而,對于資源極度受限或功能簡單的應用,裸機編程可能更合適。移植前需評估MCU的內存和處理能力,確保RTOS開銷可接受。
選擇RTOS時需考慮以下因素:
- 兼容性:確保RTOS支持目標MCU架構,如ARM Cortex-M。
- 功能:檢查是否提供所需功能,如隊列、定時器等。
- 文檔與社區:豐富的文檔和活躍的社區(如FreeRTOS社區)可加速開發。
- 許可:了解開源或商業許可條款,FreeRTOS采用MIT許可,適合大多數項目。
常見的RTOS包括FreeRTOS、uC/OS和Zephyr。本文以FreeRTOS為例,因其開源、支持廣泛且易于集成。
3、移植裸機程序到RTOS的步驟
步驟1:分析裸機代碼
首先,分析裸機代碼的結構,識別以下元素:
- 主循環:確定循環中執行的功能模塊,如傳感器讀取、數據處理。
- 中斷處理程序:記錄所有ISR及其觸發條件。
- 功能模塊:將代碼分解為獨立的功能單元,為后續任務設計做準備。
例如,一個裸機程序可能包含傳感器讀取、LED控制和串口通信功能,這些可以映射為單獨的任務。
步驟2:選擇并設置RTOS環境
選擇FreeRTOS后,需完成以下設置:
- 從FreeRTOS官網下載最新內核。
- 將核心文件(如FreeRTOS/Source/中的文件)集成到項目中,僅包含目標平臺(如GCC/ARM_CM4)和內存管理(MemMang)相關代碼。
- 創建FreeRTOSConfig.h文件,配置參數如堆大小、時鐘頻率和功能開關。
- 配置中斷重定向宏,如vPortSVCHandler、xPortPendSVHandler等,確保RTOS正確處理系統中斷。
#define configUSE_PREEMPTION 1
#define configCPU_CLOCK_HZ (SystemCoreClock)
#define configTICK_RATE_HZ ((TickType_t)1000)步驟3:設計任務架構
將裸機代碼的功能模塊映射為RTOS任務,每個任務負責單一職責。需為每個任務分配優先級,優先級高的任務可搶占低優先級任務。
步驟4:實現任務間通信
使用RTOS原語實現任務間通信和同步:
- 隊列:用于任務間數據傳遞,如傳感器數據。
- 信號量:用于事件通知,如中斷觸發。
- 互斥鎖:保護共享資源,如外設訪問。
QueueHandle_t sensorQueue;// 傳感器任務
void sensorTask(void *pvParameters) {uint32_t data;while (1) {data = readSensor();xQueueSend(sensorQueue, &data, portMAX_DELAY);vTaskDelay(pdMS_TO_TICKS(100));}
}// 處理任務
void processTask(void *pvParameters) {uint32_t data;while (1) {if (xQueueReceive(sensorQueue, &data, portMAX_DELAY) == pdPASS) {processData(data);}}
}步驟5:處理硬件交互
確保任務安全訪問硬件外設。如果多個任務訪問同一外設,需使用互斥鎖防止沖突。
SemaphoreHandle_t mutex;// 訪問共享外設
void accessPeripheral(void) {xSemaphoreTake(mutex, portMAX_DELAY);// 操作外設xSemaphoreGive(mutex);
}中斷處理程序應盡量簡潔,使用RTOS原語(如vTaskNotifyGiveFromISR)通知任務。
void ISR(void) {BaseType_t xHigherPriorityTaskWoken = pdFALSE;vTaskNotifyGiveFromISR(taskHandle, &xHigherPriorityTaskWoken);portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}步驟6:測試和調試
移植完成后,需全面測試以驗證功能和性能:
- 功能測試:確保所有任務按預期運行。
- 實時性測試:驗證關鍵任務是否滿足時序要求。
- 資源沖突檢查:使用調試工具(如JTAG或RTOS自帶工具)監控任務調度和資源訪問。
常見問題包括:
- 優先級反轉:調整任務優先級或使用優先級繼承。
- 死鎖:檢查互斥鎖使用是否正確。
- 棧溢出:增加任務棧大小或優化代碼。
建議采用增量移植,先將裸機主循環封裝為單一任務,逐步拆分為多任務,確保每步可運行。
將裸機程序移植到RTOS是提升嵌入式系統性能和可維護性的有效方法。通過分析裸機代碼、設計任務架構、實現通信和測試,開發者可以構建模塊化、實時性強的應用。FreeRTOS等RTOS提供了強大的工具和社區支持,簡化了移植過程。無論您的項目涉及多傳感器處理、通信接口還是實時控制,RTOS都能幫助您更高效地管理復雜性。



)


)




—— 內存優化)







