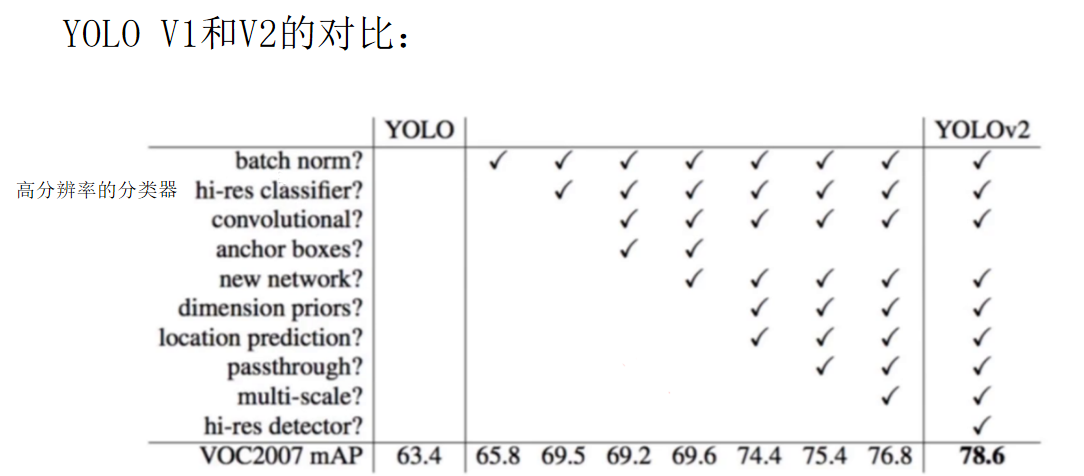
一、YOLOv2的核心改進:從V1到V2的蛻變
YOLOv2作為YOLO系列的第二代算法,在繼承V1端到端、單階段檢測的基礎上,針對V1存在的小目標檢測弱、定位精度低等問題進行了全方位升級,成為目標檢測領域的重要里程碑。
(一)Batch Normalization:讓訓練更穩定
- 核心操作:在所有卷積層后添加Batch Normalization(批歸一化),替代V1的Dropout。
- 效果:
- 提升模型收斂速度,使訓練過程更穩定。
- 顯著提高檢測精度,mAP提升約2%。
- 成為后續深度學習模型的標配預處理步驟。
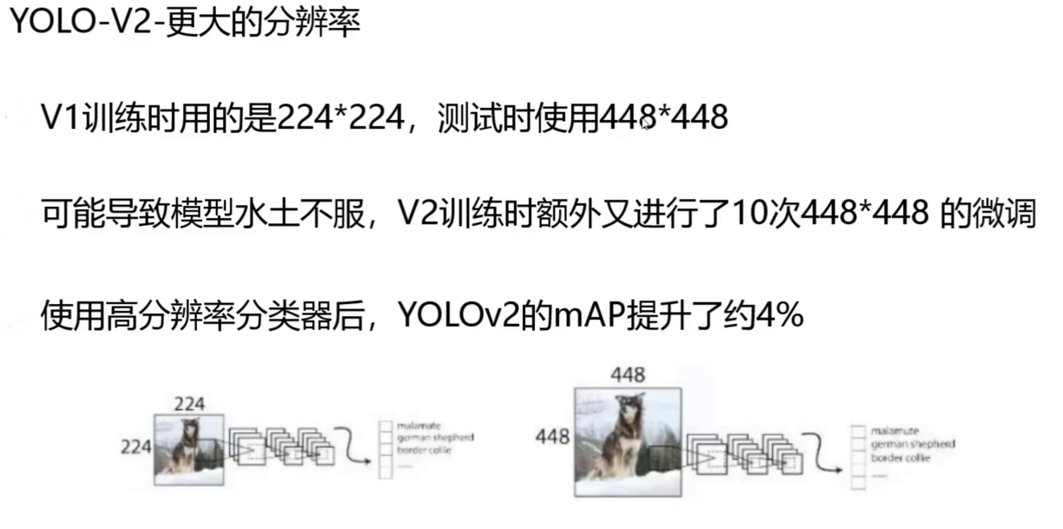
(二)高分辨率分類器:縮小訓練與測試的分辨率Gap
- 改進點:
- V1訓練時使用224×224分辨率,測試時切換為448×448,導致模型“水土不服”。
- V2在訓練后期增加10次448×448分辨率的微調,使模型適應高分辨率輸入。
- 效果:mAP提升約4%,檢測細節更豐富。
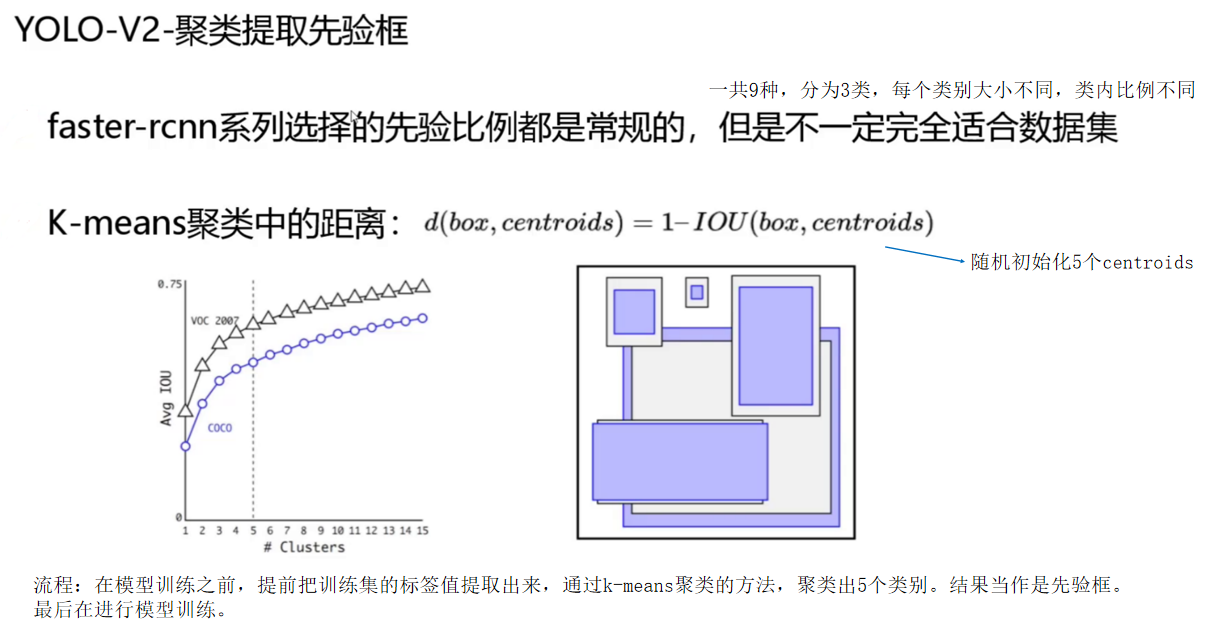
(三)引入先驗框(Anchor Boxes):讓預測更靈活
- 創新思路:
- 借鑒Faster R-CNN的先驗框機制,但通過K-means聚類生成更貼合數據集的先驗框。
- 聚類流程:從訓練集標簽中提取真實框,使用K-means算法聚類出5種尺寸的先驗框。
- 效果:
- 召回率從81%提升至88%,模型可檢測更多潛在目標。
- mAP略有下降(69.5→69.2),但通過后續改進彌補,為多尺度檢測奠定基礎。
(四)Directed Location Prediction:限制偏移量,穩定訓練
- V1的問題:直接預測偏移量可能導致訓練初期模型不穩定,出現預測框“漂移”現象。
- V2的改進:
- 預測相對網格單元的偏移量,通過sigmoid函數將tx、ty限制在(0,1)范圍內。
- 計算公式:
( b_x = \sigma(t_x) + C_x )
( b_y = \sigma(t_y) + C_y )
( b_w = P_w \cdot e^{t_w} )
( b_h = P_h \cdot e^{t_h} )
其中,( C_x、C_y )為網格坐標,( P_w、P_h )為先驗框尺寸。
- 效果:預測框更貼合真實位置,訓練過程更穩定。
二、網絡結構升級:Darknet-19的誕生
YOLOv2采用全新的基礎網絡Darknet-19,兼具高效的特征提取能力與輕量化特性。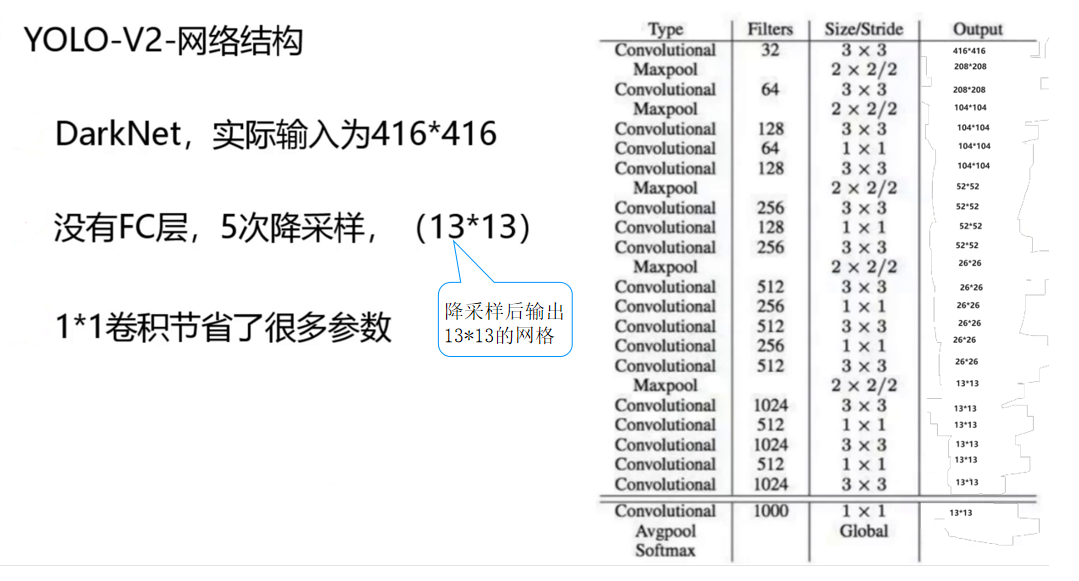
(一)架構亮點
- 層數與操作:19個卷積層+5個最大池化層,全卷積結構(無全連接層),輸入尺寸416×416。
- 降采樣策略:通過步長為2的卷積層實現降采樣,避免池化層的信息丟失。
- 1×1卷積的妙用:
- 降低特征圖維度,減少參數量。
- 增加非線性變換,提升特征表達能力。
(二)輸出特征與網格設計
- 最終輸出:13×13的網格(感受野較大,適合檢測大目標)。
- 每個網格的預測:
- 5個先驗框,每個框包含:
- 4個坐標值(x,y,w,h)
- 1個置信度(Confidence)
- 20個類別概率(VOC數據集為例)
- 總輸出維度:13×13×(5×(4+1)+20)=13×13×45。
- 5個先驗框,每個框包含:
三、多尺度訓練:讓模型適應不同大小的目標
(一)核心思想
- 由于Darknet-19全卷積結構,輸入圖像尺寸可動態調整(需為32的倍數)。
- 每訓練一定iterations,隨機切換輸入尺寸,范圍320×320至608×608。
(二)效果
- 魯棒性提升:模型對不同尺度的目標檢測更均衡,小目標檢測能力顯著增強。
- 速度與精度的權衡:
- 小尺寸(320×320):速度快,適合實時場景。
- 大尺寸(608×608):精度高,適合對細節要求高的任務。
四、特征融合與感受野優化
(一)細粒度特征融合(Passthrough Layer)
- 問題:高層特征圖(13×13)感受野大,但丟失小目標細節;低層特征圖(26×26、52×52)保留更多細節,但語義信息不足。
- 解決方案:
- 將26×26的特征圖通過Passthrough層(通道拆分與疊加)與13×13特征圖融合。
- 融合后特征圖維度:13×13×(1024+256)=13×13×1280,增強小目標的檢測能力。
(二)感受野分析:小卷積核的優勢
- 3×3卷積的堆疊:3個3×3卷積層的感受野等價于7×7卷積核,但參數量更少(27C2 vs. 49C2)。
- 非線性增強:更多卷積層引入更多非線性變換,特征表達更豐富。
五、YOLOv2的性能表現與應用場景
(一)對比傳統算法
| 算法 | mAP(VOC 2007) | FPS | 特點 |
|---|---|---|---|
| YOLOv1 | 63.4 | 45 | 速度快,小目標檢測弱 |
| YOLOv2 | 78.6 | 67 | 速度與精度平衡 |
| Faster R-CNN | 73.2 | 5 | 精度高,速度慢 |
(二)應用領域
- 實時檢測:視頻監控、無人機巡檢(高FPS優勢)。
- 多尺度目標檢測:自然場景圖像(如COCO數據集),兼顧大、中、小目標。
- 工業檢測:零件缺陷檢測(高分辨率輸入下的細節捕捉能力)。
六、總結:YOLOv2的傳承與啟示
YOLOv2通過Batch Normalization、先驗框機制、多尺度訓練等關鍵改進,在速度與精度之間找到了理想平衡點,成為后續YOLOv3/v4/v5的重要基石。其設計理念(如全卷積結構、特征融合、輕量化)對現代目標檢測算法仍具有深遠影響。無論是學術研究還是工業落地,YOLOv2都為我們提供了寶貴的思路——在追求更高精度的同時,不忘實時性的本質需求。








)










