title: 車載以太網驅動專用車智能化:域控架構設計與開發實踐
date: 2023-12-01
categories: 新能源汽車
tags: [車載以太網, 電子電氣架構, 域控架構, 專用車智能化, SOME/IP, AUTOSAR]
引言:專用車智能化轉型的挑戰與機遇
專用車作為城市建設與工業運輸的核心載體,其智能化需求日益迫切。傳統改裝模式依賴CAN總線,面臨節點數量激增、線束復雜、功能擴展性差等瓶頸。而車載以太網憑借**高帶寬(千兆級)、低延遲(微秒級)、輕量化線束(減少30%重量)**等優勢,成為下一代電子電氣架構(EEA)的核心技術。本文以某環衛車項目為例,深入解析基于車載以太網的域控架構設計,為行業提供可落地的解決方案。
目錄
- 車載以太網:專用車架構升級的“高速公路”
- 1.1 技術優勢與協議棧解析
- 1.2 以太網在專用車中的典型應用場景
- 域控架構設計:專用車智能化的“神經中樞”
- 2.1 架構分層與域控制器定義
- 2.2 通信策略:以太網與CAN的融合設計
- 2.3 案例解析:環衛車的障礙物聯動控制
- 面向服務(SOA)的開發實踐
- 3.1 服務定義與接口設計
- 3.2 代碼示例:SOME/IP服務接口實現
- 3.3 工具鏈與開發流程
- 總結與未來展望
- 互動討論
一、車載以太網:專用車架構升級的“高速公路”
1.1 技術優勢與協議棧解析
- 帶寬躍升:支持千兆級傳輸(如IEEE 802.3bw標準),滿足ADAS、遠程控制等大數據需求。
- 線束精簡:單對非屏蔽雙絞線實現全雙工通信,降低30%線束重量。
- 服務化通信:基于IP協議的服務交互(SOA),替代傳統信號交互,支持功能動態擴展。
協議棧分層:
| 層級 | 協議/標準 | 核心功能 |
|---|---|---|
| 物理層 | IEEE 802.3bw | 一對雙絞線千兆傳輸 |
| 網絡層 | IPv4/IPv6 | 跨域尋址與路由 |
| 傳輸層 | TCP/UDP | 數據可靠性保障 |
| 應用層 | SOME/IP、DoIP | 服務動態發現與診斷 |
1.2 以太網在專用車中的典型應用場景
- 實時監控:環衛車水炮狀態、垃圾壓縮進度通過以太網回傳至云端。
- 遠程控制:工程車輛通過5G+以太網實現遠程啟停與故障診斷。
- OTA升級:基于以太網的高帶寬實現車載軟件分鐘級更新。
二、域控架構設計:專用車智能化的“神經中樞”
2.1 架構分層與域控制器定義
針對專用車場景,采用**“中央網關+三域控制器”**架構(圖1):
- 中央網關:全局通信樞紐,協調跨域服務交互。
- 底盤域(CCDC):負責車輛運動控制(如轉向、制動)。
- 車身上裝域(B&UCDC):管理專用設備(如環衛水炮、垃圾壓縮)。
- 智能駕駛域(ICDC):集成環境感知與決策算法。
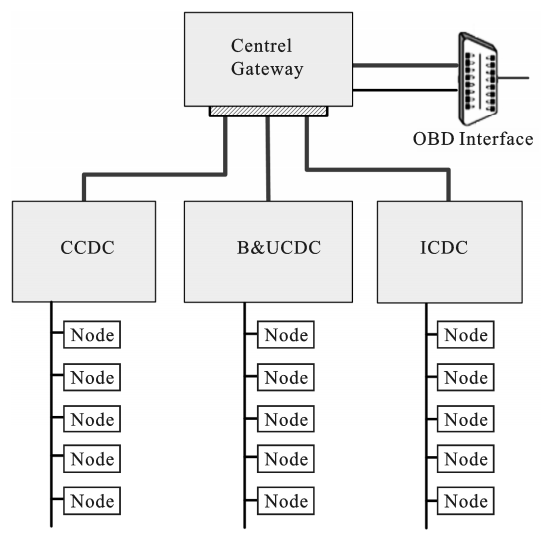
圖1:基于車載以太網的域控架構(中央網關+三域控制器)
2.2 通信策略:以太網與CAN的融合設計
- 以太網骨干網:連接中央網關與域控制器,傳輸高帶寬數據(如點云、視頻流)。
- CAN子網:域內實時控制(如電機轉速指令),確保低延遲。
2.3 案例解析:環衛車的障礙物聯動控制
- 場景:ICDC通過攝像頭檢測到行人,需立即停止水炮作業。
- 服務交互流程:
- ICDC發布
障礙物識別服務(Service ID: 0x0200)。 - B&UCDC訂閱該服務,觸發
水炮停止指令(Method接口)。 - 指令通過以太網骨干網傳輸,響應延遲<10ms。
- ICDC發布
三、面向服務(SOA)的開發實踐
3.1 服務定義與接口設計
- 基礎服務:跨域復用(如
設備狀態上報)。 - 應用服務:場景定制(如
水炮角度調節)。
服務接口示例:
| 服務ID | 服務名稱 | 提供方 | 消費方 | 接口類型 |
|---|---|---|---|---|
| 0x0100 | 上裝狀態信息 | B&UCDC | ICDC/CCDC | EVENT |
| 0x1002 | 上裝控制 | B&UCDC | 云端平臺 | RR-Method |
3.2 代碼示例:SOME/IP服務接口實現
// SOME/IP服務定義示例(偽代碼)
service UpperControl { // Event組:上裝狀態信息 eventgroup UpperStatus { event WaterLevel : uint8_t; event ValveState : bool; }; // Method:水炮角度控制 method SetSprayAngle(in float angle, out bool result);
}; // 服務訂閱與發布邏輯
void ICDC::subscribeToObstacleService() { SOMEIP::Subscribe(service_id=0x0200, instance_id=0x01); // 收到響應后觸發回調函數
}
3.3 工具鏈與開發流程
基于PREEvision搭建工具鏈(圖2):
- 需求設計:輸出功能清單與服務矩陣(參考模板)。
- 服務建模:定義服務接口與交互邏輯。
- 仿真驗證:通過CANoe模擬通信時序,驗證服務可靠性。
- 代碼生成:導入Davinci配置AUTOSAR組件,自動生成可刷寫代碼。
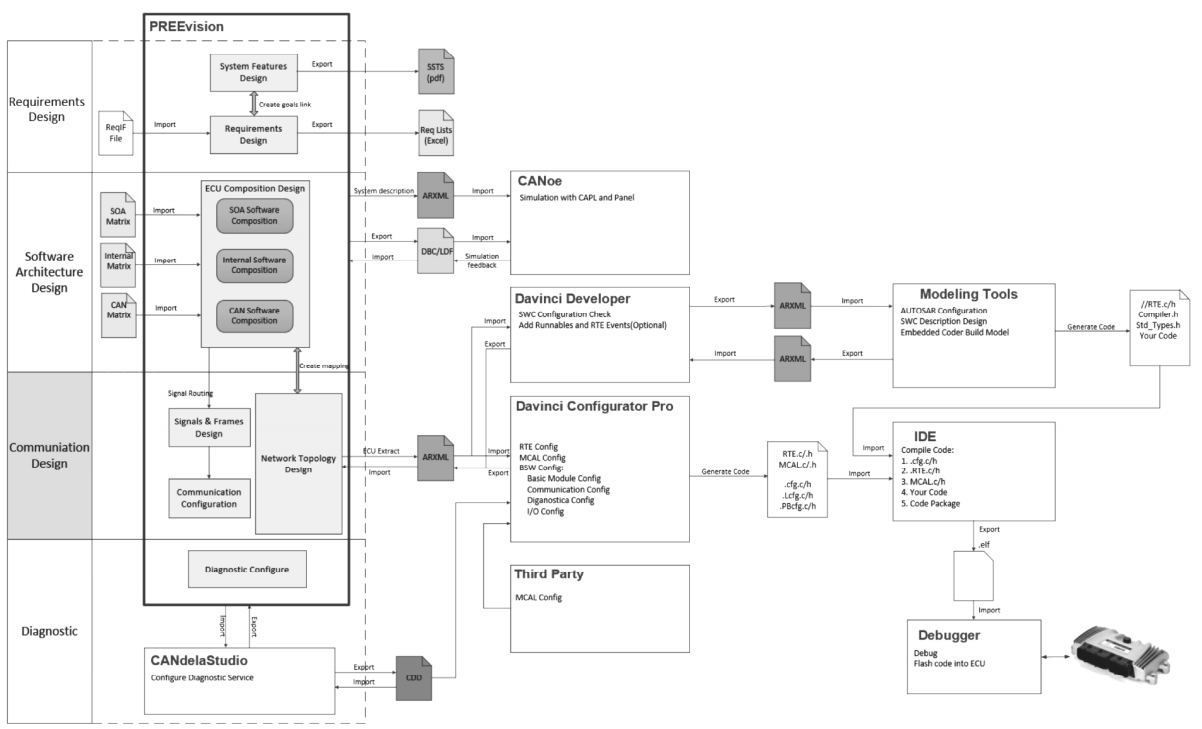
圖2:基于PREEvision的SOA開發工具鏈
四、總結與未來展望
本文提出的域控架構已在環衛、工程等專用車中落地,實現上裝系統與整車深度集成,功能迭代周期縮短40%。未來趨勢包括:
- 中央計算平臺:算力集中化(如NVIDIA DRIVE Orin),支持OTA無縫升級。
- 區域控制器:硬件資源按區域整合,進一步降低復雜度。
- 車云協同:基于5G的遠程診斷與協同控制(參考華為車云方案)。
五、互動討論
投票:你認為車載以太網在商用車中面臨的最大挑戰是什么?
- 硬件成本過高
- 協議標準化不足
- 開發工具鏈不成熟
討論:歡迎在評論區分享你的項目經驗或技術疑問,點贊+收藏本文可私信獲取完整架構設計文檔與仿真案例代碼!
參考文獻
- 經驗:從CAN到以太網為主的車載網絡架構升級
- 車載以太網轉USB接口工具選型指南(2025版)
一鍵三連(點贊?? 收藏📁 評論💬),獲取更多技術干貨! 🔥
作者簡介:深耕新能源汽車電子架構領域,主導多個專用車智能化項目,擅長以太網與SOA落地實踐。關注我的專欄:總線工具:TSMaster、ZcanPRO、ZXdoc等系列,解鎖《車載以太網實戰手冊》!
)











![[已解決] LaTeX “Unicode character“ 報錯 (中文字符處理)](http://pic.xiahunao.cn/[已解決] LaTeX “Unicode character“ 報錯 (中文字符處理))

智能化專項匯報方案)
!!!學會Python爬蟲輕松賺外快】)

調度邏輯)

