
文章目錄
- 1.`HC-SR04`介紹
- 2.`HC-SR04`原理介紹
- 2.1原理概述
- 3.2原理詳解
- 4驅動代碼編寫
- 4.1寫前思考
- 4.2硬件連線
- 5.總結
- hcsr04.h
- hcsr04.c
1.HC-SR04介紹
超聲波傳感器有很多種類的型號:HC-SR04、UC-025、UC-026、UC-015、US-100等等,但是他們都大同小異。他們的主要區別是工作參數有點不一樣,像是工作的電壓或者溫度,探測距離或精度有點差別。引腳是一樣的,都是4個引腳(us-100多了一個GND引腳),引腳的工作和作用也是一樣的。
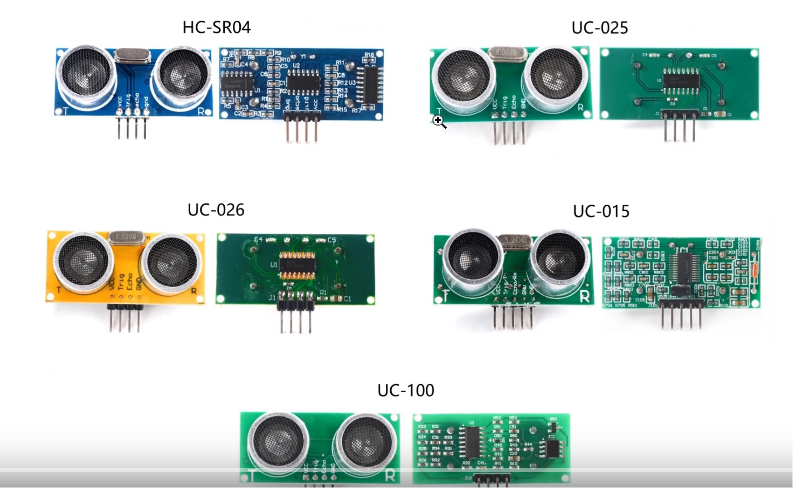
其中我們最常用的為
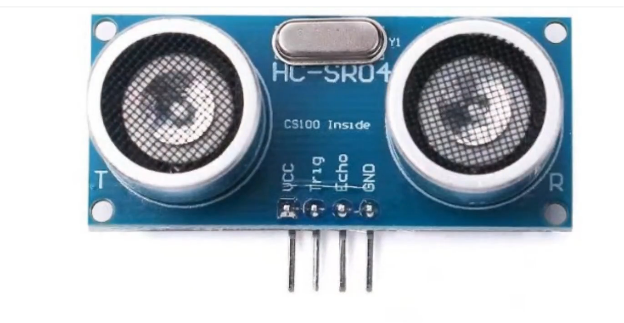
接線如下:
HC-SR04 | STM32 | 備注 |
|---|---|---|
VCC | 3.3V/5V | 外接直流電源 |
Trig | 任意一個GPIO口 | 輸入端 |
| ECHO | 任意一個GPIO口 | 輸出端 |
GND | GND | 接地 |
2.HC-SR04原理介紹
2.1原理概述
超聲波測距的工作原理其實很簡單,傳感器發送超聲波,超聲波碰到障礙物反彈回來,被傳感器接收到。芯片算出發送和接收的時間間隔,再利用公式:s=vxt,看下面示意圖,所以實際距離=測量距離/2= 速度 x時間/2。
順便一提,超聲波在空氣中的傳播速度大概是 343m/,傳播速度受到環境條件的影響,如溫度、濕度和氣壓等
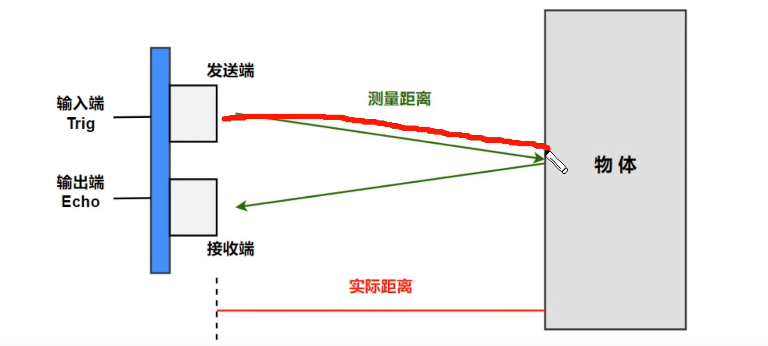
超聲波模塊有兩個超聲波探頭,一個是發送端,負責發送超聲波,一個是接受端,負責接收超聲波。
3.2原理詳解
接下來我們用時序圖的方式來介紹超聲波發送和接收的過程以及如何計算距離的。
- 正常測距時的時序:
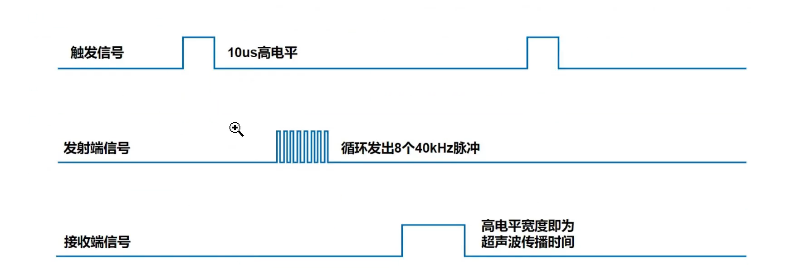
- 單片機會給超聲波模塊發送大于
10us的高電平的觸發信號; - 超聲波模塊接收到觸發信號后
Trig端發送8個40KHz的超聲波脈沖。 - Echo端由低電平轉為高電平,并同時開始發送超聲波。
- 超聲波模塊接收到返回信號后,
Echo端由高電平轉為低電平。 - Echo的高電平寬度即為超聲波發出的時間。
4驅動代碼編寫
明白了超聲波測距的原理,我們知道了超聲波測距的重點是測量超聲波在空氣中的時間。接下來我們來寫超聲波傳感器的驅動代碼。
4.1寫前思考
我們計算差超聲波往返所需時間,然后乘于超聲波的速度,計算出距離,所以我們需要一個類似于秒表的東西,來測我們的時間。
所以我們可以先用定時器來做一個以微妙為單位的計時。為了方便使用,我們再封裝若干個使用函數以便于我們使用這個定時器。
程序如下:
// TIM2 初始化句柄
TIM_HandleTypeDef tim2_handle;/*** @brief TIM2 定時器初始化函數* 設置定時器基本參數,并調用 HAL 庫進行初始化*/
void tim2_init(void)
{// 指定定時器實例為 TIM2(即使用 TIM2 作為定時器)tim2_handle.Instance = TIM2;// 設置分頻器:72-1 = 71// 如果主頻為 72MHz,那么定時器時鐘頻率為 72MHz / 72 = 1MHz// 即定時器每計數一次所需時間為 1 微秒tim2_handle.Init.Prescaler = 72 - 1;// 設置自動重裝載值(ARR):65536-1 = 65535// 當定時器計數到 65535 后溢出,重新從 0 開始// 若計數頻率為 1MHz,則溢出周期為 65536 微秒(即 65.536 毫秒)tim2_handle.Init.Period = 65536 - 1;// 向上計數模式(從0計數到ARR)tim2_handle.Init.CounterMode = TIM_COUNTERMODE_UP;// 關閉自動重裝載寄存器的預裝載功能tim2_handle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;// 調用 HAL 庫函數初始化定時器 TIM2HAL_TIM_Base_Init(&tim2_handle);
}/*** @brief TIM2 的 MSP(MCU Support Package)初始化函數* 一般用于配置定時器的時鐘及中斷* @param htim TIM句柄指針*/
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{// 判斷當前初始化的是不是 TIM2if(htim->Instance == TIM2){// 使能 TIM2 定時器時鐘__HAL_RCC_TIM2_CLK_ENABLE();}
}/*** @brief 啟動 TIM2 定時器*/
void tim2_start(void)
{// 啟動基礎定時器,不帶中斷HAL_TIM_Base_Start(&tim2_handle);
}/*** @brief 停止 TIM2 定時器*/
void tim2_stop(void)
{// 停止基礎定時器HAL_TIM_Base_Stop(&tim2_handle);
}/*** @brief 獲取當前 TIM2 定時器計數器的值* @return 當前計數器的值(0~65535)*/
uint16_t tim2_get_cnt(void)
{// 使用 HAL 宏獲取定時器當前計數器值return __HAL_TIM_GetCounter(&tim2_handle);
}/*** @brief 設置 TIM2 定時器計數器的值* @param val 要設置的計數器值*/
void tim2_set_cnt(uint16_t val)
{// 使用 HAL 宏設置定時器的當前計數器值__HAL_TIM_SetCounter(&tim2_handle, val);
}4.2硬件連線
| HC-SR04 | C8T6 |
|---|---|
| VCC | VCC |
| GND | GND |
| Trig | PB6 |
| echo | PB7 |
因為我們涉及到對個別引腳的使用,所以我們需要對引腳進行一些簡單的配置(為了方便對引腳進行修改,我們對引腳進行了一些簡單的宏定義):
hcsrc04.h:
#define TRIG_PORT GPIOB
#define TRIG_PIN GPIO_PIN_6
#define TRIG_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define TRIG_HIGH() HAL_GPIO_WritePin(TRIG_PORT,TRIG_PIN,GPIO_PIN_SET)
#define TRIG_LOW() HAL_GPIO_WritePin(TRIG_PORT,TRIG_PIN,GPIO_PIN_RESET)#define ECHO_PORT GPIOB
#define ECHO_PIN GPIO_PIN_7
#define ECHO_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define ECHO_STATUS() HAL_GPIO_ReadPin(ECHO_PORT,ECHO_PIN)
hcsrc04.c
/*** @brief 初始化 HC-SR04 超聲波模塊所使用的 GPIO 引腳* Trig 為輸出模式,用于發出超聲波脈沖* Echo 為輸入模式,用于接收返回的超聲波信號*/
void hcsr04_gpio_init(void)
{// 定義 GPIO 初始化結構體,用于配置引腳屬性GPIO_InitTypeDef gpio_initstruct;// 使能 Trig 引腳所在 GPIO 端口的時鐘TRIG_GPIO_CLK_ENABLE();// 使能 Echo 引腳所在 GPIO 端口的時鐘ECHO_GPIO_CLK_ENABLE();/*************** 配置 Trig 引腳 ***************/// 設置 Trig 引腳號(例如 GPIO_PIN_1)gpio_initstruct.Pin = TRIG_PIN;// 設置為推挽輸出模式(用于產生控制信號)gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP;// 上拉電阻(防止懸空引起不穩定)gpio_initstruct.Pull = GPIO_PULLUP;// 設置 IO 速度為中速(可根據需要選擇低、中、高)gpio_initstruct.Speed = GPIO_SPEED_MEDIUM;// 初始化 Trig 引腳所在端口HAL_GPIO_Init(TRIG_PORT, &gpio_initstruct);/*************** 配置 Echo 引腳 ***************/// 設置 Echo 引腳號(例如 GPIO_PIN_2)gpio_initstruct.Pin = ECHO_PIN;// 設置為輸入模式(用于接收超聲波返回信號)gpio_initstruct.Mode = GPIO_MODE_INPUT;// Echo 通常不需要特別配置上拉/下拉,默認即可(如需設置可加上)// gpio_initstruct.Pull = GPIO_NOPULL;// 初始化 Echo 引腳所在端口HAL_GPIO_Init(ECHO_PORT, &gpio_initstruct);
}為了方便我們使用,我們也需要封裝一個函數,這個函數名我們定義為:hcsr04_get_length,相信大家通過這個函數名就可以知道這個函數的作用,在前文中,我們介紹了超聲波是如何發出的,四個 引腳的作用有什么不同。簡單梳理一下:
- 單片機給
Trig引腳至少10us長的一個高電平。 ECHO引腳從低電平到高電平,表示開始發送波;波發出的那一刻,開啟軟件定時器(開始計時)。ECHO引腳,由高電平轉為低電平,表示波回來了,此時我們停止計時器,計算經過時長。- 獲取經過的時間,并根據計算公式算出距離。
基于此,我們寫出:
/*** @brief 獲取 HC-SR04 超聲波測距模塊測得的距離(單位:厘米)* @return 距離值(cm)*/
float hcsr04_get_length(void)
{// 用于保存 Echo 信號持續的時間(單位:微秒)uint16_t totol_time = 0;// 用于保存最終計算出的距離值(單位:厘米)float distance = 0;/*************** 第1步:發送Trig脈沖 ***************/// 給 Trig 引腳發送一個 10 微秒以上的高電平脈沖,觸發超聲波發射TRIG_HIGH(); // 設置 Trig 引腳為高電平delay_us(15); // 延遲至少 10us,這里用 15us 更加保險TRIG_LOW(); // 設置 Trig 引腳為低電平,發送完成/*************** 第2步:等待 Echo 信號拉高(開始接收) ***************/// 當 Echo 引腳由低電平變為高電平時,表示超聲波已經發射出去// 此時開始計時while(ECHO_STATUS() == GPIO_PIN_RESET); // 等待 Echo 變為高電平tim2_start(); // 啟動定時器tim2_set_cnt(0); // 將定時器計數清零/*************** 第3步:等待 Echo 信號拉低(接收到回波) ***************/// 當 Echo 引腳由高電平變為低電平時,表示回波已經接收完成// 此時停止計時while(ECHO_STATUS() == GPIO_PIN_SET); // 等待 Echo 變為低電平tim2_stop(); // 停止定時器/*************** 第4步:獲取 Echo 高電平持續時間 ***************/// 獲取定時器計數值(單位是 us,取決于定時器配置)totol_time = tim2_get_cnt();/*************** 第5步:根據聲速計算距離 ***************/// 聲速約為 34300 cm/s,即 0.0343 cm/us// 因為往返距離,所以除以 2// distance = (totol_time × 0.0343) / 2 ≈ totol_time * 0.01715distance = totol_time * 0.01715f;// 返回測得的距離(單位:cm)return distance;
}5.總結
本文章中,我們介紹了超聲波傳感器的原理,并以其中較為經典的 HC-SR04為例,給出了驅動代碼。現將完整代碼粘貼如下:
hcsr04.h
#ifndef __HCSR04_H__#define __HCSR04_H__#define TRIG_PORT GPIOB
#define TRIG_PIN GPIO_PIN_6
#define TRIG_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define TRIG_HIGH() HAL_GPIO_WritePin(TRIG_PORT,TRIG_PIN,GPIO_PIN_SET)
#define TRIG_LOW() HAL_GPIO_WritePin(TRIG_PORT,TRIG_PIN,GPIO_PIN_RESET)#define ECHO_PORT GPIOB
#define ECHO_PIN GPIO_PIN_7
#define ECHO_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define ECHO_STATUS() HAL_GPIO_ReadPin(ECHO_PORT,ECHO_PIN)
void hcsr04_init(void);
float hcsr04_get_length(void);
#endif
hcsr04.c
#include "hcsr04.h"
#include "sys.h"
#include "delay.h"
TIM_HandleTypeDef tim2_handle = {0};//定時器初始化函數
void tim2_init(void)
{tim2_handle.Instance = TIM2;tim2_handle.Init.Prescaler = 72-1;tim2_handle.Init.Period = 65536-1;tim2_handle.Init.CounterMode = TIM_COUNTERMODE_UP;tim2_handle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;HAL_TIM_Base_Init(&tim2_handle);}//msp函數
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{if(htim->Instance == TIM2){__HAL_RCC_TIM2_CLK_ENABLE();}
}void tim2_start(void)
{HAL_TIM_Base_Start(&tim2_handle);
}
void tim2_stop(void)
{HAL_TIM_Base_Stop(&tim2_handle);
}
uint16_t tim2_get_cnt(void)
{return __HAL_TIM_GetCounter(&tim2_handle);
}
void tim2_set_cnt(uint16_t val)
{__HAL_TIM_SetCounter(&tim2_handle,val);
}/******************************************************** */
/*初始化超聲波傳感器*/
void hcsr04_gpio_init(void)
{GPIO_InitTypeDef gpio_initstruct;//打開時鐘TRIG_GPIO_CLK_ENABLE();ECHO_GPIO_CLK_ENABLE();gpio_initstruct.Pin=TRIG_PIN;gpio_initstruct.Mode=GPIO_MODE_OUTPUT_PP;gpio_initstruct.Pull=GPIO_PULLUP;gpio_initstruct.Speed=GPIO_SPEED_MEDIUM;HAL_GPIO_Init(TRIG_PORT,&gpio_initstruct);gpio_initstruct.Pin=ECHO_PIN;gpio_initstruct.Mode=GPIO_MODE_INPUT;HAL_GPIO_Init(ECHO_PORT,&gpio_initstruct);
}
void hcsr04_init(void)
{tim2_init();hcsr04_gpio_init();}
float hcsr04_get_length(void)
{uint16_t totol_time=0;float distance=0;//1Trig引腳,給Trig引腳至少10us的高電平TRIG_HIGH();delay_us(15);TRIG_LOW();//2ECHO引腳,由低電平跳轉到高電平,表示開始發送波,波發出去的那一下,開啟定時器while(ECHO_STATUS()==GPIO_PIN_RESET);tim2_start();tim2_set_cnt(0);//3ECHO,由高電平條轉低電平,表示波回來了,波回來的那一下,我們開始停止定時器,計算出中間經過//多長時間while(ECHO_STATUS()==GPIO_PIN_SET);tim2_stop();//4.計算出中間經過的時間totol_time=tim2_get_cnt();//5.距離=速度(343m/s)*時間/2;distance=totol_time*0.01715;return distance;}
的差異)
)


)













)
)