模型下載:
基于simscape,單質量系統帶位置控制資源-CSDN文庫
在實例1中,我們搭建了不帶控制的單質量彈簧阻尼系統,該系統沒有外界力量介入,只有彈簧的初始彈力,帶著彈簧使勁彈來彈去。
SimScape物理建模實例1--單質量-彈簧-阻尼系統-CSDN博客
在實例2中,我們為該系統加入一個外力,通過外力,控制質量塊的位移。
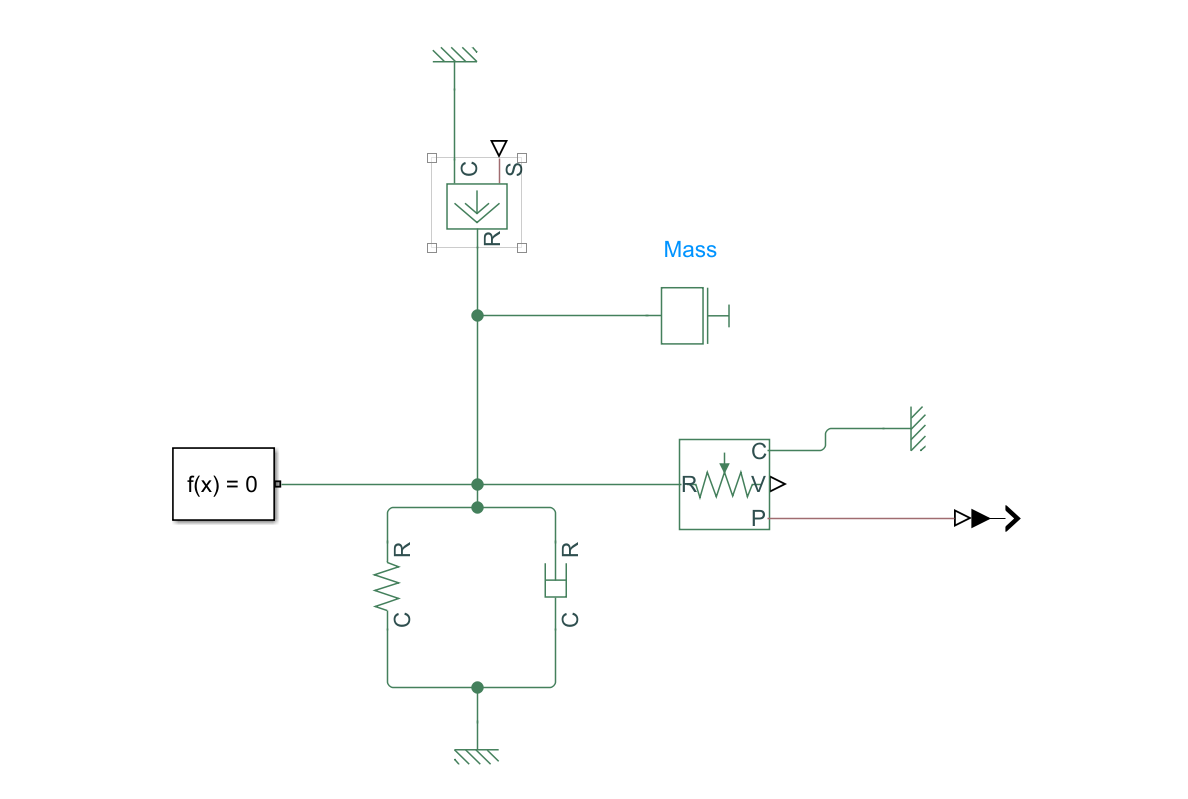
1. 在demo1的基礎上加入一個理想力源模塊。

?2、按照模塊描述,S口接控制信號,R和C是機械傳遞轉換接口,正方向的力是由C傳遞到R。這里我們將C接參考地,R接質量塊回路,如下圖所示:
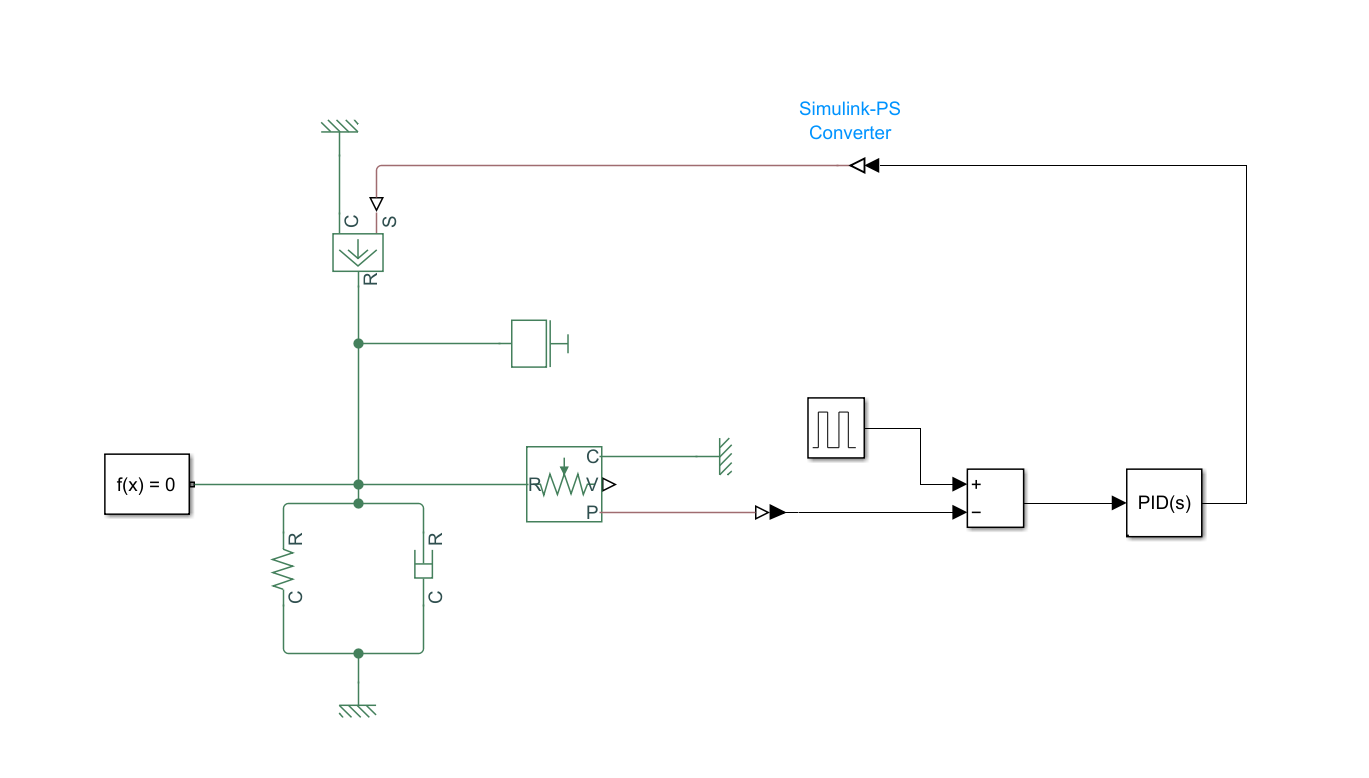
?3、搭建PID控制回路,并調試pid參數
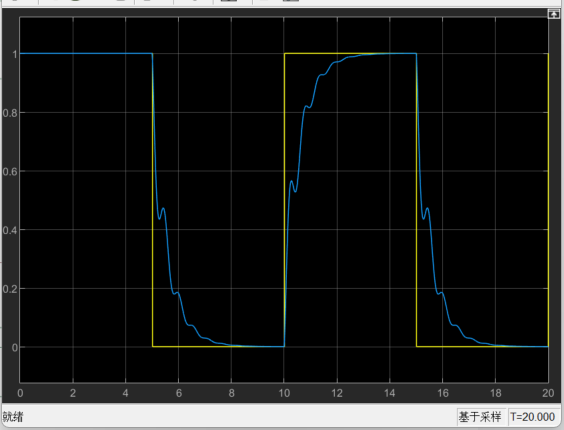
?位移控制效果如下:
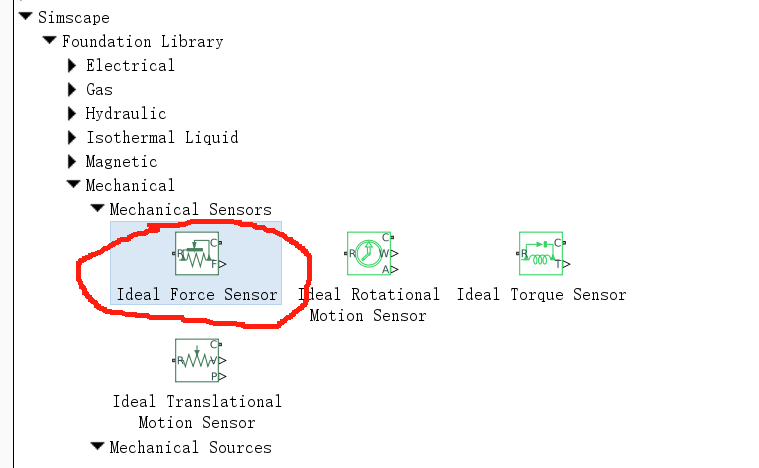
4、加入力傳感器,對比理想力與pid計算出的力差別。根據說明描述,F是傳感器力值,如力的傳遞是由C傳到R為正方向,如我們實際生活中要加力傳感器,需要將物體斷開接上拉壓傳感器一樣,我們這里也要將原有的力回路斷開,鏈接上力傳感器。

?如下圖所示:
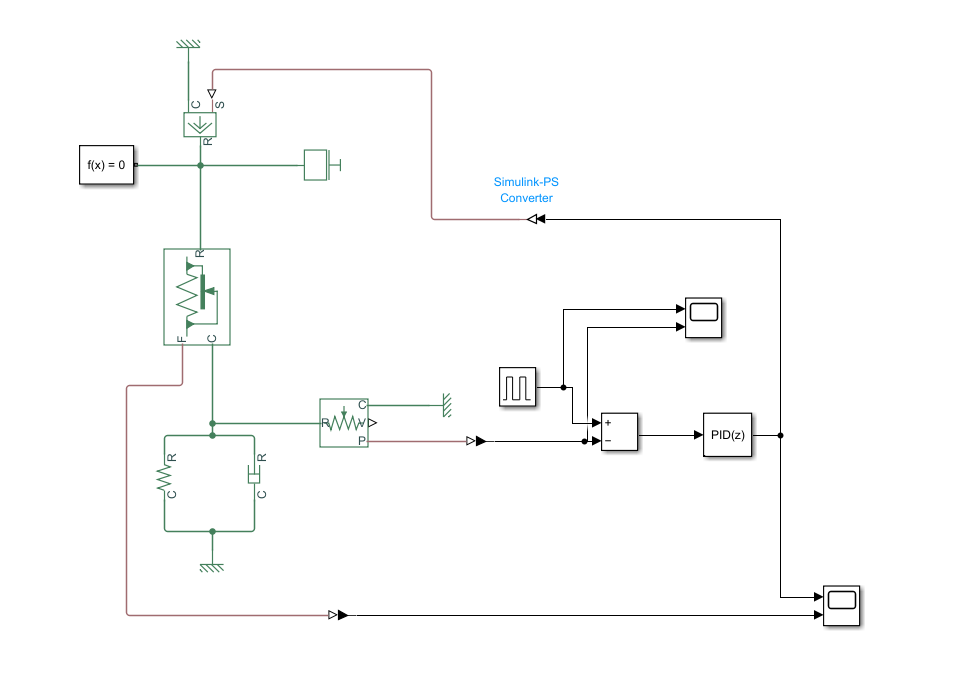
?運行仿真后發現,理想力源產生的實際力與pid期望力如下所示。
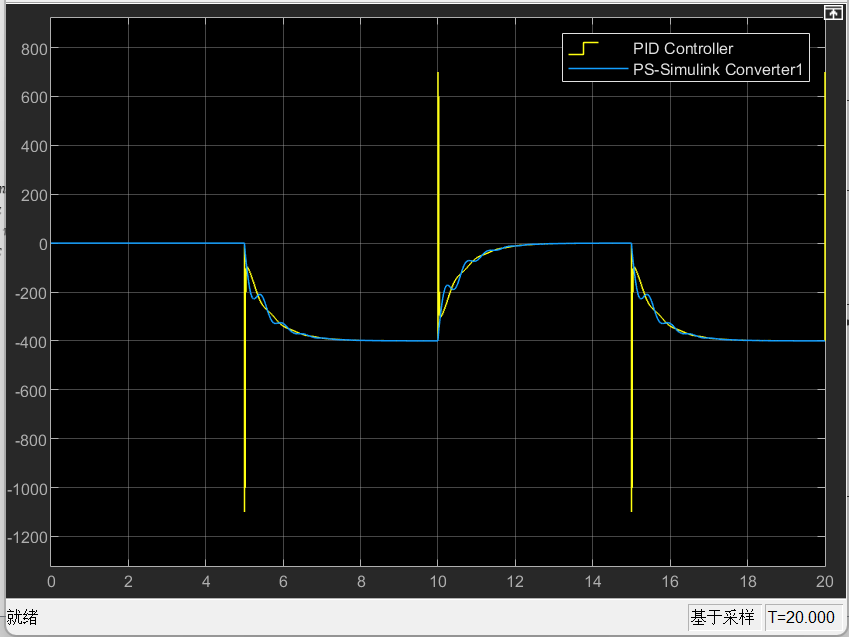
?
?












)
)





)