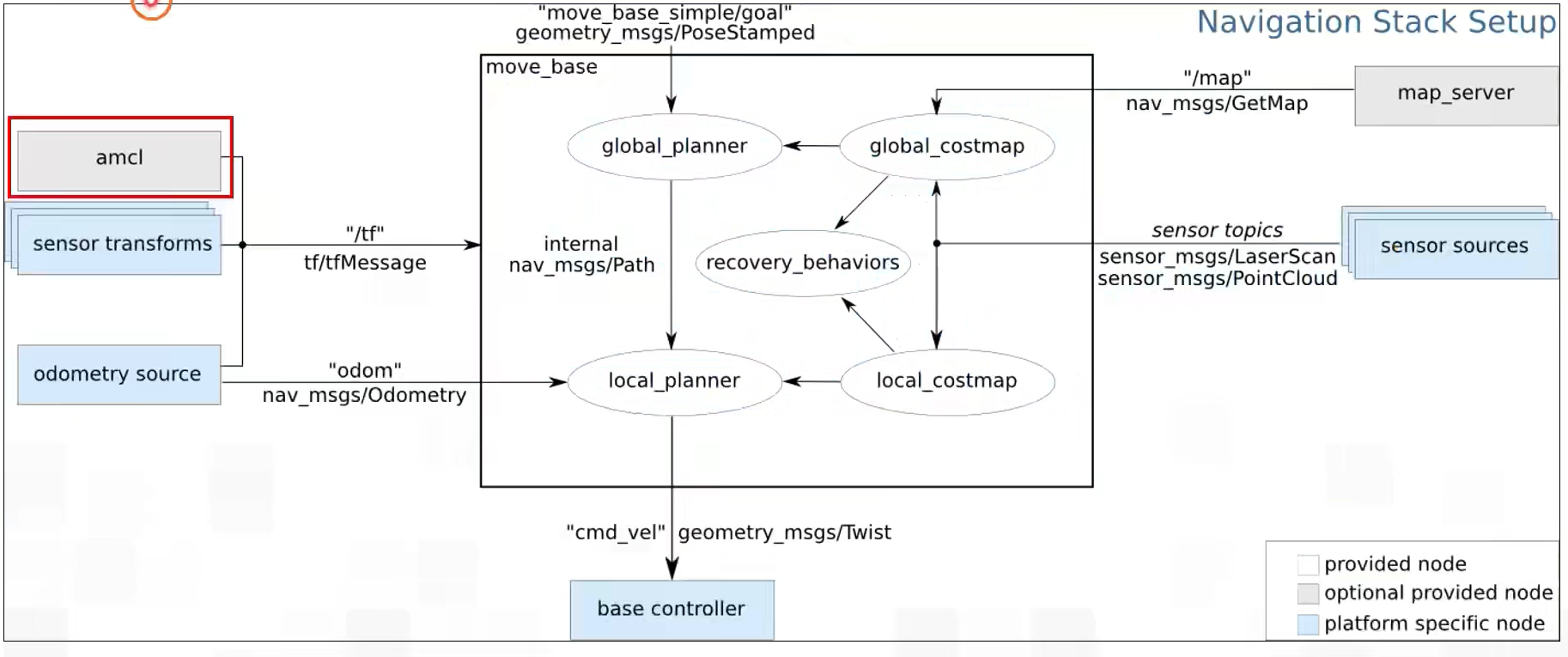
自適應蒙特卡洛定位,簡稱AMCL,主要提供定位功能并以/tf形式輸出
蒙特卡洛算法的基本思想:當所要求的問題是某種事件出現的概率或者是某個變量的期望值時,它們可以通過某種"試驗"的方法,得到這種事件出現的概率,并用它們作為問題的解
粒子濾波
粒子濾波就是使用了蒙特卡洛思想的方法。把粒子濾波用在定位上就成為蒙特卡洛定位。其核心思想是通過一組隨機采樣粒子(即假設的狀態)及其權重來近似后驗概率分布,并通過重采樣避免粒子退化。
粒子濾波實現的蒙特卡洛定位過程如下:
- 初始化:生成初始粒子集,表示機器人可能的初始位姿分布,注意一般粒子要均勻分布在環境的自由空間(非障礙物區域)。如果有初始位姿(有先驗,比如初始GPS或人工指定位置),則粒子集中在初始位姿附近的高斯分布中。這里,生成的粒子數量作為參數可調,粒子數量?NN?影響計算效率和定位精度
- 權重計算:根據傳感器觀測數據(如激光雷達、深度相機)調整粒子權重,反映其與真實位姿的匹配程度。計算每個粒子的觀測似然?p(zt∣xt(i)),即當前傳感器數據在該粒子位姿?xt(i)xt(i)??下與地圖的匹配程度。以雷達為例,對每個激光束,在地圖中計算其端點與最近障礙物的距離誤差,誤差越小權重越高。
- 重采樣:淘汰低權重粒子,復制高權重粒子,避免粒子退化(即多數粒子權重趨近0)。拋棄舊粒子重新生成相同數量的新粒子,新粒子集中出現在權重大的舊粒子位置上,并且有大量的新粒子疊加在同一個位置。因為所有的新粒子都是重采樣得到的,所以它們現在有相同的權重
- 狀態轉移:根據機器人運動模型(如里程計)傳播粒子,預測下一時刻的位姿分布。傳感器不是絕對精準的,也就是存在誤差,測出來的速度和方向是一個范圍值,粒子在這些范圍內隨機取樣,導致狀態轉移后的粒子不完全重疊
- 狀態轉移后再進行權重計算階段,重復過程234。加權平均或最高權重粒子作為最終位姿。
- 不斷重復上述過程,會在某一時刻完成定位,即大部分粒子都集中到了小車附近,這時小車移動,蒙特卡洛的粒子集中區域就會跟隨移動,實現定位效果
由amcl定位的原理可以得知,剛開始時,粒子均勻撒在整個地圖上,真正接近真實位姿的粒子可能很少。?小車還沒運動或只運動了一點點,激光雷達/深度相機等傳感器數據不足以讓權重計算準確區分正確粒子。為了解決這個問題,可以在小車啟動后先不運動,保持靜止幾秒鐘,讓傳感器數據(如激光雷達)反復計算權重,淘汰錯誤粒子,但是如果環境特征不明顯(比如空曠走廊),可能仍然不準。也可以在定位未收斂時,限制小車最大速度,讓它緩慢運動,避免劇烈碰撞。
# 在move_base或局部規劃器中設置
initial_planner:max_vel_x: 0.1 # 初始最大速度(通常0.5m/s,這里降到0.1)convergence_threshold: 0.8 # 粒子置信度>80%才全速運動也可以啟動時使用更多粒子(如5000→10000),等收斂后再減少。
amcl:initial_particles: 10000 # 初始粒子數after_convergence_particles: 2000 # 收斂后減少到2000?
當機器人定位基本完成時,即這些粒子都集中在一塊了,這個時候重采樣的粒子就可以自適應的減少一些?。當遭遇劫持綁架(下面會介紹),即粒子的平均分數(權重)突然降低,在全局重新撒一些粒子來重新找位置。上面所說的自適應調整粒子數量就是自適應解決的問題。
機器人定位分為三大問題:全局定位、位姿跟蹤、綁架劫持。
- 全局定位:機器人剛啟動,不清楚初始位置,這時靠粒子濾波等方法以及自身的運動來確定自己在地圖中的位姿
- 位姿跟蹤:已知自身的位姿,持續估計自身在地圖中的實時位置和朝向
- 綁架劫持:已知自身的位姿,被人為的放到另一個環境中,這時上一時刻的位姿數據還在,粒子很集中,但是下一時刻計算權重時,發現所有的粒子與測量值不符(所有粒子權重都比較小)。?
官方提供的amcl功能包(包括在navigation中)輸入為地圖,雷達和小車自身的tf信息,最后以tf轉換的形式輸出定位信息?
參數?
以下為amcl_omni.launch文件,用于全向移動小車。這些參數取自navigation/amcl/cfg/AMCL.cfg。具體參數含義在最后
<launch><arg name="initial_pose_x" default="$(optenv initial_pose_x 0.0)"/><arg name="initial_pose_y" default="$(optenv initial_pose_y 0.0)"/><arg name="initial_pose_a" default="$(optenv initial_pose_a 0.0)"/>
<node pkg="amcl" type="amcl" name="amcl"><!-- Publish scans from best pose at a max of 10 Hz --><!--<param name="initial_pose_x" value="$(arg initial_pose_x)" />--> <!-- 根據實際初始位置設置x坐標,單位米 --><!--<param name="initial_pose_y" value="$(arg initial_pose_y)" />--> <!-- 根據實際初始位置設置y坐標,單位米 --><!--<param name="initial_pose_a" value="$(arg initial_pose_a)" />--> <!-- 根據實際初始朝向設置角度,單位弧度 --><param name="odom_model_type" value="omni"/><param name="odom_alpha5" value="0.1"/><param name="transform_tolerance" value="0.2" /> <!--0.1--><param name="gui_publish_rate" value="10.0"/><param name="laser_max_beams" value="50"/><param name="use_map_topic" value="false"/> <!-- //當設置為true時,AMCL將會訂閱map話題,而不是調用服務返回地圖。也就是說,當設置為true時,有另外一個節點實時的發布map話題,也就是機器人在實時的進行地圖構建,并供給amcl話題使用;當設置為false時,通過map server,也就是調用已經構建完成的地圖。在navigation 1.4.2中新加入的參數。 --><param name="first_map_only" value="true"/> <!-- //當設置為true時,AMCL將僅僅使用訂閱的第一個地圖,而不是每次接收到新的時更新為一個新的地圖,在navigation 1.4.2中新加入的參數。 --><param name="min_particles" value="1000"/><param name="max_particles" value="10000"/><param name="kld_err" value="0.03"/><param name="kld_z" value="0.99"/><param name="odom_alpha1" value="0.2"/><param name="odom_alpha2" value="0.2"/><!-- translation std dev, m --><param name="odom_alpha3" value="0.8"/><param name="odom_alpha4" value="0.2"/><param name="laser_z_hit" value="0.5"/><param name="laser_z_short" value="0.05"/><param name="laser_z_max" value="0.05"/><param name="laser_z_rand" value="0.5"/><param name="laser_sigma_hit" value="0.2"/><param name="laser_lambda_short" value="0.1"/><param name="laser_lambda_short" value="0.1"/><!-- <param name="laser_model_type" value="likelihood_field"/> --><param name="laser_model_type" value="beam"/><param name="laser_likelihood_max_dist" value="2.0"/><param name="update_min_d" value="0.15"/> <!--0.2--><param name="update_min_a" value="0.3"/> <!--0.5--><param name="odom_frame_id" value="odom"/><param name="resample_interval" value="1"/><param name="transform_tolerance" value="0.1"/><param name="recovery_alpha_slow" value="0.0"/><param name="recovery_alpha_fast" value="0.0"/><!-- <param name="odom_frame_id" value="odom"/> --><!-- //里程計默認使用的坐標系 --><!-- <param name="base_frame_id" value="base_link"/> --><!-- //用作機器人的基坐標系 --><!-- <param name="global_frame_id" value="map"/> --><!-- //由定位系統發布的坐標系名稱 --><!-- <param name="tf_broadcast" value="false"/> --><!-- //設置為false阻止amcl發布全局坐標系和里程計坐標系之間的tf變換 -->
</node>
</launch>
amcl_diff.launch用于差速小車。?
<launch>
<node pkg="amcl" type="amcl" name="amcl" output="screen"><!-- Publish scans from best pose at a max of 10 Hz --><param name="odom_model_type" value="diff"/><param name="odom_alpha5" value="0.1"/><param name="transform_tolerance" value="0.2" /><param name="gui_publish_rate" value="10.0"/><param name="laser_max_beams" value="12"/><param name="min_particles" value="1000"/><param name="max_particles" value="10000"/><param name="kld_err" value="0.05"/><param name="kld_z" value="0.99"/><param name="odom_alpha1" value="0.2"/><param name="odom_alpha2" value="0.2"/><!-- translation std dev, m --><param name="odom_alpha3" value="0.8"/><param name="odom_alpha4" value="0.2"/><param name="laser_z_hit" value="0.5"/><param name="laser_z_short" value="0.05"/><param name="laser_z_max" value="0.05"/><param name="laser_z_rand" value="0.5"/><param name="laser_sigma_hit" value="0.2"/><param name="laser_lambda_short" value="0.1"/><param name="laser_lambda_short" value="0.1"/><!-- <param name="laser_model_type" value="likelihood_field"/> --><param name="laser_model_type" value="beam"/><param name="laser_likelihood_max_dist" value="2.0"/><param name="update_min_d" value="0.2"/><param name="update_min_a" value="0.5"/><param name="odom_frame_id" value="odom"/><param name="resample_interval" value="1"/><param name="transform_tolerance" value="0.1"/><param name="recovery_alpha_slow" value="0.0"/><param name="recovery_alpha_fast" value="0.0"/><!-- <param name="odom_frame_id" value="odom"/><param name="base_frame_id" value="base_link"/><param name="global_frame_id" value="map"/><param name="scan_frame_id" value="laser_frame"/> --><!-- <param name="scan_topic" value="scan"/> <remap from="scan" to="lidar/scan"/> -->
</node>
</launch>
以下是我導航總的啟動文件,可以看到對amcl launch文件的調用?
<launch><!-- Run the map server --><include file="$(find ucar_controller)/launch/base_driver.launch" > </include><include file="$(find ydlidar)/launch/ydlidar.launch" > </include><node name="map_server" pkg="map_server" type="map_server" args="$(find ucar_nav)/maps/yf.yaml" output="screen"><param name="frame_id" value="map" /></node> <!-- 啟動AMCL重啟控制器 --><!--<node name="restart_amcl" pkg="ucar_nav" type="restart_amcl.py" output="screen"/>--><include file="$(find ucar_nav)/launch/config/amcl/amcl_omni.launch" > </include><node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen"><param name="base_global_planner" value="global_planner/GlobalPlanner"/><param name="base_local_planner" value="teb_local_planner/TebLocalPlannerROS"/><rosparam file="$(find ucar_nav)/launch/config/move_base/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find ucar_nav)/launch/config/move_base/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find ucar_nav)/launch/config/move_base/global_planner_params.yaml" command="load" /><rosparam file="$(find ucar_nav)/launch/config/move_base/tra_local_planner_params.yaml" command="load" /><rosparam file="$(find ucar_nav)/launch/config/move_base/local_costmap_params.yaml" command="load" /><rosparam file="$(find ucar_nav)/launch/config/move_base/global_costmap_params.yaml" command="load" /><rosparam file="$(find ucar_nav)/launch/config/move_base/laser_filters.yaml" command="load" /><remap from="scan" to="/raw_scan" /> <!-- 輸入原始激光話題 --><remap from="scan_filtered" to="/scan" /> <!-- 輸出過濾后話題 --></node><node pkg="rviz" type="rviz" name="rviz" args="-d $(find ucar_nav)/launch/config/rviz/rviz.rviz" /></launch>
?
<--------里程計模型參數-------->
odom_model_type:
含義: 里程計模型類型。對于全向驅動機器人,設置為 omni。
調整建議: 如果機器人是全向驅動的,保持為 omni;如果是差分驅動的,改為 diff。odom_alpha1 到 odom_alpha5:
含義: 這些參數用于調整里程計模型的噪聲。具體含義如下:
odom_alpha1: 旋轉噪聲(由于旋轉引起的平移噪聲)。
odom_alpha2: 平移噪聲(由于平移引起的旋轉噪聲)。
odom_alpha3: 平移噪聲(由于平移引起的平移噪聲)。
odom_alpha4: 旋轉噪聲(由于旋轉引起的旋轉噪聲)。
odom_alpha5: 旋轉噪聲(由于平移引起的旋轉噪聲)。
調整建議: 如果機器人的里程計噪聲較大,可以適當增加這些值;如果噪聲較小,可以減少這些值。<--------粒子濾波器參數-------->
min_particles:
含義: 粒子濾波器的最小粒子數量。
調整建議: 增加粒子數量可以提高定位精度,但會增加計算負載。默認值 1000 通常足夠。
max_particles:
含義: 粒子濾波器的最大粒子數量。
調整建議: 增加粒子數量可以提高定位精度,但會增加計算負載。默認值 10000 通常足夠。
kld_err:
含義: KLD(Kullback-Leibler Divergence)誤差的上限,用于動態調整粒子數量。
調整建議: 減小該值會增加粒子數量,提高定位精度,但會增加計算負載。默認值 0.05 通常足夠。
kld_z:
含義: KLD 的置信度參數。
調整建議: 增加該值會增加粒子數量。默認值 0.99 通常足夠。<--------激光雷達參數-------->
laser_max_beams:
含義: 用于定位的激光雷達光束的最大數量。
調整建議: 增加該值可以提高定位精度,但會增加計算負載。默認值 50 通常足夠。
laser_model_type:
含義: 激光雷達模型類型。beam 表示使用光束模型,likelihood_field 表示使用似然場模型。
調整建議: likelihood_field 模型通常更精確,但計算量更大。如果激光雷達數據質量較高,可以嘗試使用 likelihood_field。
laser_z_hit:
含義: 激光雷達命中模型的權重。
調整建議: 增加該值可以提高對激光雷達命中數據的信任度。默認值 0.5 通常足夠。
laser_z_short:
含義: 激光雷達短距離模型的權重。
調整建議: 增加該值可以提高對短距離數據的信任度。默認值 0.05 通常足夠。
laser_z_max:
含義: 激光雷達最大距離模型的權重。
調整建議: 增加該值可以提高對最大距離數據的信任度。默認值 0.05 通常足夠。
laser_z_rand:
含義: 激光雷達隨機噪聲模型的權重。
調整建議: 增加該值可以提高對隨機噪聲的容忍度。默認值 0.5 通常足夠。
laser_sigma_hit:
含義: 激光雷達命中模型的標準差。
調整建議: 增加該值可以放寬對激光雷達數據的精度要求。默認值 0.2 通常足夠。
laser_lambda_short:
含義: 激光雷達短距離模型的衰減系數。
調整建議: 增加該值可以提高對短距離數據的信任度。默認值 0.1 通常足夠。
laser_likelihood_max_dist:
含義: 激光雷達似然場模型的最大距離。
調整建議: 增加該值可以擴大似然場的范圍。默認值 2.0 通常足夠。<--------更新參數-------->
update_min_d:
含義: 觸發定位更新的最小平移距離(米)。當機器人移動的距離超過 update_min_d 時,amcl 會觸發一次定位更新。
調整建議: 減小該值可以提高定位頻率,但會增加計算負載。默認值 0.2 通常足夠。
update_min_a:
含義: 觸發定位更新的最小旋轉角度(弧度)。當機器人旋轉的角度超過 update_min_a(弧度) 時,amcl 會觸發一次定位更新。
調整建議: 減小該值可以提高定位頻率,但會增加計算負載。默認值 0.5 通常足夠<--------其他參數-------->
transform_tolerance:
含義: 坐標系變換的容忍時間(秒)。它定義了在查詢坐標變換時,允許的最大時間偏差。如果坐標變換的時間戳與當前時間的偏差超過 transform_tolerance,系統會認為該變換無效。
調整建議: 增加該值可以容忍更大的時間偏差。默認值 0.1 通常足夠。
resample_interval:
含義: 重采樣間隔(更新次數)。用于控制 粒子濾波器的重采樣頻率。它的作用是決定 AMCL 在多少次更新后才對粒子進行重采樣。合理設置 resample_interval 可以提高定位的精度和效率。
調整建議: 增加該值可以減少重采樣頻率,降低計算負載。resample_interval 設置為 1,則每次更新后都會進行重采樣。
recovery_alpha_slow 和 recovery_alpha_fast:
含義: 用于恢復行為的慢速和快速衰減系數。它們的作用是控制 AMCL 在定位失敗或丟失時如何調整粒子濾波器的分布,以嘗試重新定位機器人。
recovery_alpha_slow控制 AMCL 在定位失敗時,緩慢增加粒子分布的隨機性。這個過程較慢,適合在定位失敗初期使用。取值范圍:0.0 到 1.0。
recovery_alpha_fast控制 AMCL 在定位失敗時,快速增加粒子分布的隨機性。當機器人定位失敗較嚴重時,AMCL 會快速增加粒子的隨機性,以嘗試快速覆蓋更大的區域。這個過程較快,適合在定位失敗較嚴重時使用。
recovery_alpha_slow適用場景:定位失敗較輕(例如機器人位置稍有偏差)。環境變化較小(例如機器人移動到一個已知區域但定位稍有偏差)。不會顯著改變粒子分布,避免過度隨機化導致定位結果不穩定。
recovery_alpha_fast適用場景:定位失敗較嚴重(例如機器人完全丟失定位)。環境變化較大(例如機器人被移動到未知區域)。快速覆蓋更大的區域,增加重新定位的可能性。
調整建議: 默認情況下,recovery_alpha_slow 和 recovery_alpha_fast 都設置為 0.0,即禁用恢復行為。這是因為恢復行為可能會引入額外的計算開銷,且在某些場景下并不需要。?



方法、優勢、作用和程序舉例)


)




)




)


