發那科機器人5(異常事件和程序備份加載+ROBOGUIDE離線仿真)
- 一,異常事件和程序備份加載
- 1,常見異常事件
- 2,零點復歸介紹
- 3,程序備份-加載(未整理)
- 二,`ROBOGUIDE`離線仿真
- 1,仿真軟件簡介及安裝步驟(未整理)
- 2,機器人==導入與工具==與==工件添加==
- 2.1,機器人導入(未整理)
- 2.2,工件的添加(未整理)
- 3,打開示教器及創建程序
一,異常事件和程序備份加載
1,常見異常事件
課程內容
常見異常事件
課程目標
掌握異常事件的處理方法
什么是機器人異常事件:
異常事件是指由于硬件設備問題和軟件設計錯誤,而導致機器人無法運行的事件;
遇到異常事件而無法正常使用機器人時,如何處理這些異常事件,以保證機器人正常運行呢?
一般情況下,通過系統事件日志中報錯編號查看事件類型,根據故障排除手冊,找到相應的處理方式。
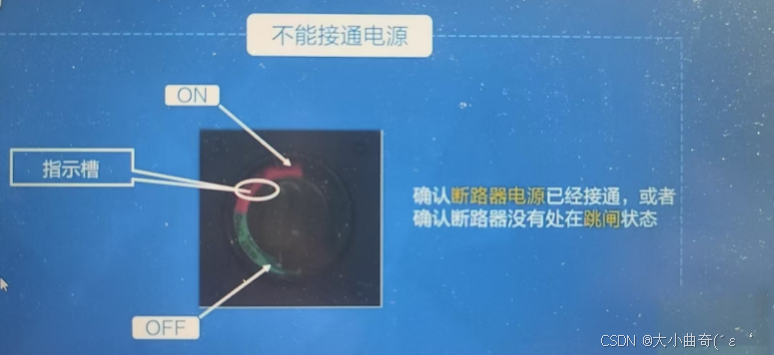
(故障1)不能接通電源
排除步驟:
①,首先要確認斷路器電源是否接通,或者是否處于跳閘的狀態;
從上圖中我們可以看出呢。這個斷路器有一個指示槽,紅色部分表示ON,綠色部分表示OFF。確認一下斷路器是否撥到ON處,若沒有,那就需要將其撥到ON;
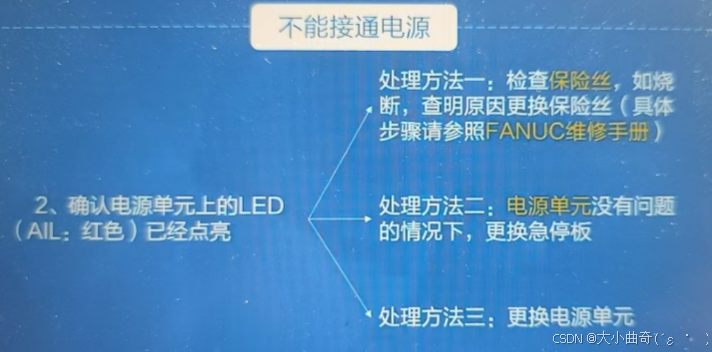
②,確認電源單元上的LED燈是否點亮,如果點亮,那就要檢查一下保險絲,看保險絲是否燒斷,若燒斷,就需要更換保險絲;
更換新的保險絲之前,先要查找保險絲是什么原因導致它壟斷的,找到相應問題之后,需要將其解決之后,才能夠進行保險絲的更換。
③,若保險絲沒有壞,那么有可能就需要更換急停板或者電源單元。
更換急停板或者電源單元的話,就說明這個故障已經是比較大的故障了;
(故障2)無法手動操作
無法手動操作,有哪幾個原因呢?
①,能給機器人上電,但是無法操作機器人。首先需要觀察試示教器的左上角有效開關是否打到ON(是否處于有效狀態)。還有控制器上的模式開關,是否已經切換成手動模式;
若這兩個都沒有錯誤,那我們就看一下操作方式是否有錯誤;
(故障3)示教程序時不能執行程序
怎么處理呢?
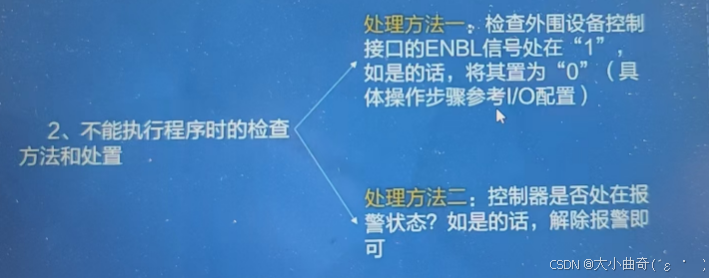
首先查看一下報警日志,看是什么原因導致不能執行程序。通常情況下,可以通過相應的提示,查找到對應的問題。
下面,例舉了一些在日常操作中,經常遇到的一些常規報警代碼:
| 報警代碼 | 原因 | 解決辦法 |
|---|---|---|
OS-001 | 軟件內部錯誤 | 切斷機器人控制裝置的電源,嘗試重新接通,得不到改善時,就需要聯系一下FANUC技術支持,或者找專業人員進行相應調試。 |
SRVO-0001 | 操作面板的急停按鈕被按下 | 首先解決急停面板的被按下的原因,查找至到報警原因后,再順時針方向轉動操作面板的急停按鈕,解除報警后,按下RESET按鈕 |
SRVO-002 | 示教器的急停按鈕被按下 | 沿著順時針,轉動示教器的急停按鈕,然后解除相應的報警,并按下RESET鍵,清除報警信號 |
SRVO-003 | 安全開關已釋放或用力按下了安全開關 | 半按住示教器安全開關,然后再按下RESET鍵復位報警 |
SRVO-004 | 安全柵欄被打開 | 確認安全柵欄內有沒有人,如果沒有人,就要關閉安全柵欄,然后按下RESET鍵復位報警信號; |
SRVO-005 | 超出了機器人的關節和各個方向的硬件極限開關? |






)




)

】)
——qt的背景及安裝)



![[docker基礎一]docker簡介](http://pic.xiahunao.cn/[docker基礎一]docker簡介)
