摘要:
本文將從 RTOS 演進、RT-Thread 的版本分支、內核架構、核心特性、社區與生態、以及典型產品應用等多維度,全面呈現 RT-Thread 的全景圖。
關鍵詞:RT-Thread、RTOS、微內核、組件化、軟件包管理、SMP
-
1. RTOS 演進與 RT-Thread 定位
-
2. RT-Thread 版本分支對比
-
2.1 Nano 版本
-
2.2 Standard 版本
-
2.3 Smart 版本
-
-
3. 微內核 vs 單內核 vs 類 Piko 內核架構
-
4. RT-Thread 核心特性解析
-
4.1 可裁剪組件
-
4.2 FinSH 命令行與 Shell
-
4.3 軟件包管理系統(PKG)
-
4.4 SMP 與對稱多核支持
-
4.5 圖形化配置與易用性
-
-
5. 社區生態與商業支持
-
6. 產品案例與行業應用
-
7. 小結與展望
1. RTOS 演進與 RT-Thread 定位
1.1 RTOS 演進簡史
嵌入式操作系統經歷了以下幾個關鍵階段:
-
裸機編程
早期嵌入式設備多采用“裸機”方式:無操作系統,全部任務由主循環或中斷驅動。優點是系統開銷極低,缺點是復雜度高、可維護性差。 -
單任務調度
為了解決裸機循環的復雜性,引入了最簡單的“輪詢式任務調度”(Super Loop)。它通過不斷循環調用各任務,實現偽并發。但缺乏真正的搶占調度和優先級管理。 -
基于任務的 RTOS
隨著需求增長,真正的 RTOS 應運而生。它提供任務管理、優先級搶占、中斷管理、定時器、IPC 等功能,大幅提高系統可擴展性和實時性能。
典型代表:μC/OS-II、FreeRTOS、VxWorks 等。 -
多核與異構 RTOS
近年,隨著多核 SoC 普及,RTOS 也開始支持對稱多核(SMP)與異構多核(AMP),并引入容器化、安全可信執行環境(TEE)等新特性。
1.2 RT-Thread 的定位與優勢
RT-Thread 是一款國產開源 RTOS,面向 IoT、消費電子、工業控制等多種應用,具有以下優勢:
-
模塊化可裁剪:零依賴核心,可根據項目裁剪組件,最小內核 < 5KB。
-
豐富的軟件包生態:官方和社區維護數百個 PKG,涵蓋網絡、文件系統、GUI、AI 推理等。
-
命令行交互(FinSH):內核自帶 Shell,方便調試與在線升級。
-
SMP 支持:從 Nano 到 Smart 不同分支可選,輕松適配單核與多核 SoC。
-
商業版本與技術支持:提供企業級授權和專屬服務,滿足商業項目需求。
2. RT-Thread 版本分支對比
RT-Thread 目前主要有三個版本分支,分別面向不同資源與性能需求。
| 特性/版本 | Nano | Standard | Smart |
|---|---|---|---|
| 目標資源 | < 32KB Flash,< 4KB RAM | 32KB–256KB Flash,8KB–64KB RAM | > 256KB Flash,> 64KB RAM,多核 SoC |
| 內核大小 | ~2–5KB | ~10–20KB | ~30–50KB |
| 支持組件 | 線程,信號量,時鐘 | IPC(信號量/郵箱/消息隊列),內存池 | 完整組件包管理,文件系統,網絡協議棧,全功能 |
| SMP 支持 | 否 | 否 | 是 |
| 典型應用場景 | 傳感器節點,低功耗遙測 | 家電控制,工業儀表 | 工業網關,機器視覺,多核網關 |
2.1 Nano 版本
-
特點:極簡內核,代碼依賴少,只包含最基本的線程、時鐘與同步。
-
應用:超低功耗傳感器節點、小型無線遙測設備。
-
裁剪示例:
#define RT_USING_TIMER_SOFT #define RT_USING_SEMAPHORE #define RT_THREAD_PRIORITY_MAX 8
2.2 Standard 版本
-
特點:在 Nano 基礎上增加 IPC、內存管理、軟件定時器等功能。
-
應用:家電控制面板、工業儀表、機器人控制器。
-
典型組件:FinSH、RT-Thread PKG、EasyFlash、FAL、SpiFlash 驅動等。
2.3 Smart 版本
-
特點:完整 RT-Thread 框架,支持文件系統(DFS)、網絡協議棧(LWIP)、TLS、安全可信環境、多核 SMP。
-
應用:工業網關、智能路由、多核視覺處理。
-
多核支持:
/* 啟用 SMP 功能 */ #define RT_USING_SMP #define RT_SMP_CPU_NR 2
3. 微內核 vs 單內核 vs 類 Piko 內核架構
RT-Thread 的內核設計借鑒了多種 RTOS 架構理念:
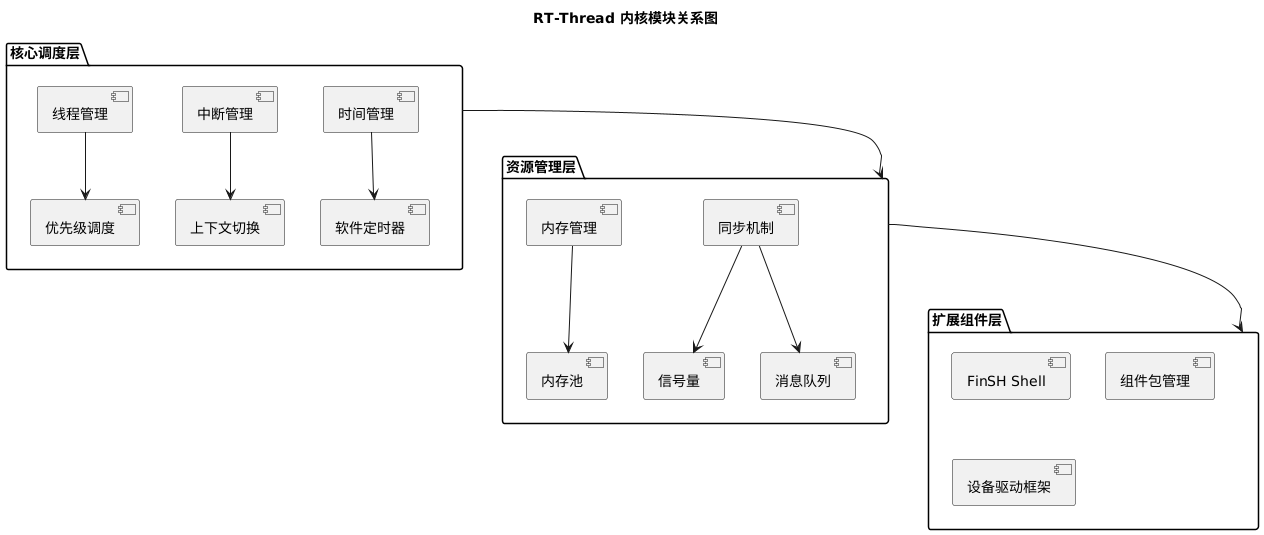
如上圖所示,RT-Thread 核心內核十分精簡,僅包含最必要的調度、時鐘與中斷。上層通過可選組件機制按需掛載,從而保證內存占用最小。
-
微內核思想:盡可能將非核心功能剝離為組件。
-
類 Piko 內核:調度算法簡單高效,偏向事件驅動。
-
單核 vs SMP:Smart 版本在原有內核上增加 SMP 支持,依托底層鎖與對稱調度實現多核并行。
4. RT-Thread 核心特性解析
4.1 可裁剪組件
RT-Thread 將功能拆分為多個互不依賴的組件(Module)。用戶在 rtconfig.h 中根據項目需求打開或關閉組件,大大減少無用代碼。
/* 僅啟用線程、時鐘、信號量 */
#define RT_USING_THREAD
#define RT_USING_TIMER_SOFT
#define RT_USING_SEMAPHORE
-
優點:降低 Flash/RAM 占用,提升啟動速度。
-
缺點:組件依賴需注意,若裁剪錯誤可能導致鏈接失敗。
4.2 FinSH 命令行與 Shell
-
FinSH:RT-Thread 內置交互式命令行,支持命令注冊、腳本執行。
-
功能:動態查看線程狀態、修改系統參數、在線升級。
/* 命令注冊示例 */
#include <finsh.h>
void hello(int argc, char** argv)
{rt_kprintf("Hello RT-Thread!\n");
}
MSH_CMD_EXPORT(hello, Say hello to RT-Thread);
4.3 軟件包管理系統(PKG)
RT-Thread PKG 類似 Linux 下的 apt/npm,支持在線索引、安裝、更新、卸載。社區維護上千個 PKG,涵蓋:
-
網絡:lwip、netdev、wifi-manager
-
文件系統:dfs、elm-fatfs、littlefs
-
GUI:lvgl、rtgui
-
AI 推理:tinyml、openmv
# 安裝 lwip
pkgs --global --install lwip
4.4 SMP 與對稱多核支持
Smart 版本通過在內核中添加自旋鎖、原子操作,實現多核并行調度。支持任務跨核遷移和負載均衡。
-
配置:
#define RT_USING_SMP #define RT_SMP_CPU_NR 4 -
特性:
-
共享中斷管理
-
多核信號量原語
-
動態負載均衡
-
4.5 圖形化配置與易用性
-
RT-Thread Studio:一體化 IDE,提供圖形化組件選擇、發布系統及在線調試。
-
VSCode 插件:支持 PKG 管理、代碼補全、調試配置。
5. 社區生態與商業支持
| 項目 | 社區版 | 商業版 |
|---|---|---|
| 許可證 | Apache-2.0 | 商業授權 |
| 技術支持 | 社區論壇、GitHub | 專屬客服、培訓服務 |
| 定制開發 | 社區承接 | 官方團隊 |
| 維護 SLA | 無 | 最高 24 小時響應 |
| 安全加固 | 社區修復 | 代碼審核、漏洞掃描 |
-
開源社區:RT-Thread 官網、Gitee、GitHub。
-
技術論壇:活躍的中英文討論區,定期舉行線上研討會。
-
商業化:針對大型工業項目,提供深度定制、安全加固、認證支持。
6. 產品案例與行業應用
-
智能音箱控制板
-
SoC:Cortex-M4,256KB Flash,64KB RAM
-
功能:語音喚醒、Wi-Fi 連接、局部 OTA
-
版本:Standard + PKG(Mesh、mbedtls)
-
-
工業網關
-
SoC:雙核 Cortex-A53 + M4
-
功能:多協議轉換、SMP 并行處理、隔離隔斷
-
版本:Smart + SMP + TEE
-
-
電動自行車儀表
-
SoC:Cortex-M0,64KB Flash
-
功能:CAN 總線讀取、電量管理、外設驅動
-
版本:Nano + 簡易驅動
-
-
視覺巡檢機器人
-
SoC:四核 Cortex-A7 + AI 協處理器
-
功能:圖像采集、神經網絡推理、本地存儲
-
版本:Smart + PKG(OpenMV、LVGL)
-
7. 小結與展望
本文從 RTOS 演進、RT-Thread 版本、內核架構、核心特性、社區生態及典型案例等方面,全面勾勒出 RT-Thread 的技術全景。下一篇將深入剖析 RT-Thread 內核核心機制——線程管理、調度器設計、中斷上下文切換、IPC 同步與內存管理,歡迎持續關注!
作者:Damo wang
版權聲明:本文遵循 Apache-2.0 協議,轉載請注明出處。
![[docker基礎一]docker簡介](http://pic.xiahunao.cn/[docker基礎一]docker簡介)

)












![[python] 函數2-匿名函數](http://pic.xiahunao.cn/[python] 函數2-匿名函數)



