1.SPI簡介
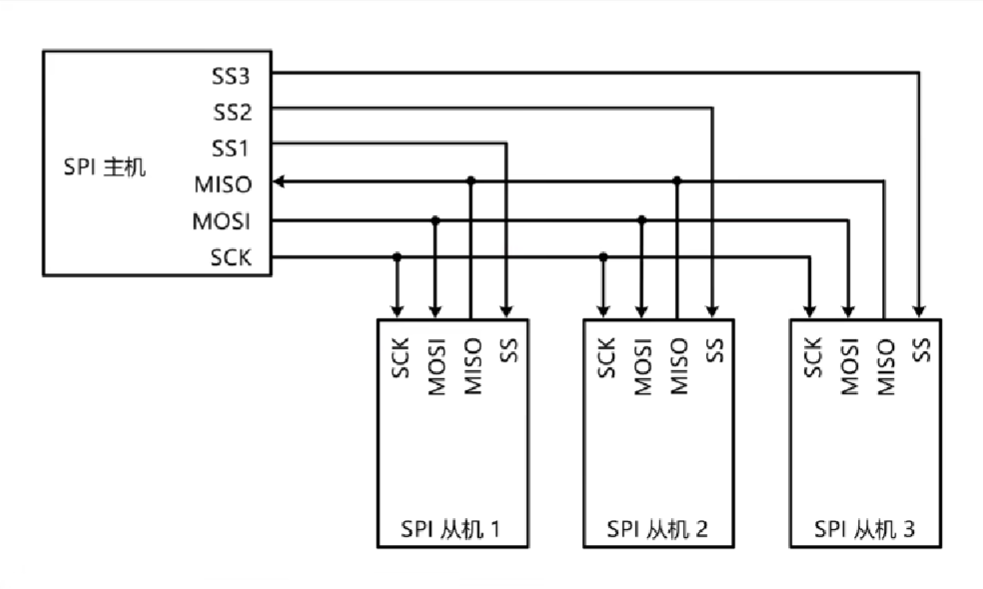
2.硬件電路
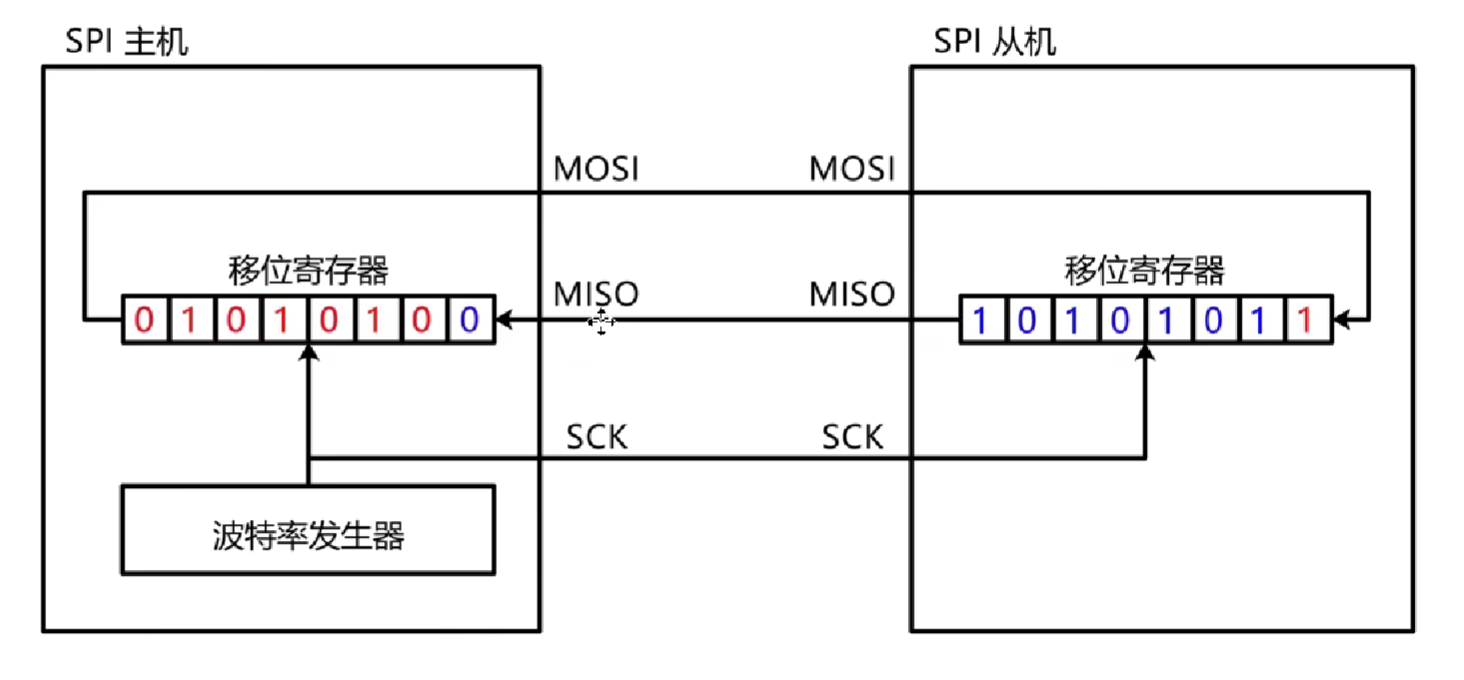
所有SPI設備的SCK(時鐘)、MOSI(主機輸出從機輸入)、MISO(主機輸入從機輸出)分別連在一起。SCK線只能被主機控制,和I2C相同。
主機另外引出多條SS控制線,分別接到各從機的SS引腳 (SS不用的時候為高電平,當主機需要選中某個從機時將對應的SS置為低電平,同一時刻只能選擇一個從機)
輸出引腳配置為推挽輸出,輸入引腳配置為浮空或上拉輸入
在從機SS=1,也就是從機未被選擇狀態,它的MISO必須關閉輸出,也就是高阻態
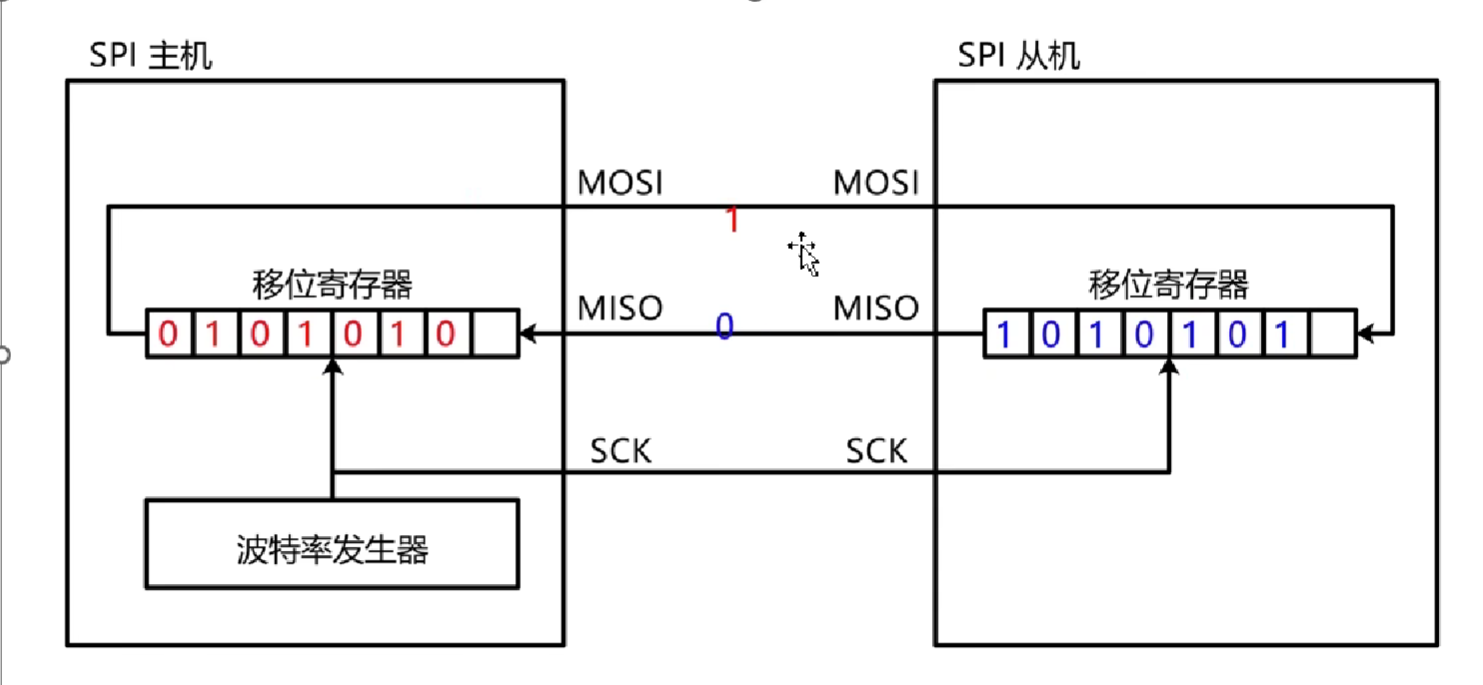
2.1?移位示意圖(交換數據原理)
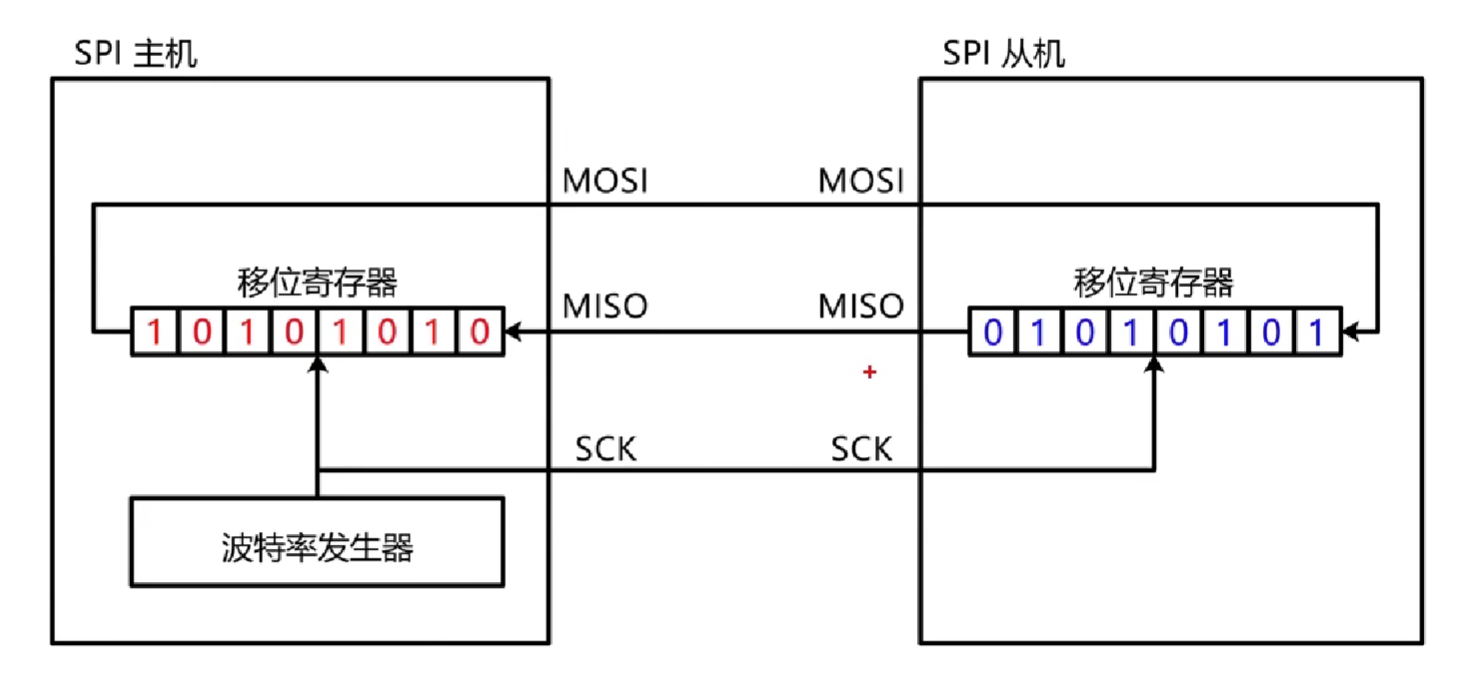 ????????波特率發生器產生時鐘驅動以為寄存器進行移位,在信號的上升沿所有數據(包括主機和從機)往左移動一位,信號的下降沿進行采樣,也就是主機從左邊移出去的數據到達從機的右邊,從機從左邊移出的數據到達主機的左邊。重復多次就能交換一個字節。如果只想發送不想接收,那就發送一個隨機值
????????波特率發生器產生時鐘驅動以為寄存器進行移位,在信號的上升沿所有數據(包括主機和從機)往左移動一位,信號的下降沿進行采樣,也就是主機從左邊移出去的數據到達從機的右邊,從機從左邊移出的數據到達主機的左邊。重復多次就能交換一個字節。如果只想發送不想接收,那就發送一個隨機值
3.SPI的基本時序
3.1 開始
SS從高電平變到低電平 (SS是低電平有效,當SS為低電平時相當于告訴對應地址線上的從機被選中了)
3.2 結束

SS從低電平變到高電平(SS是低電平有效,當SS為高電平時相當于告訴對應地址線上的從機通信結束了)
3.3 交換一個字節
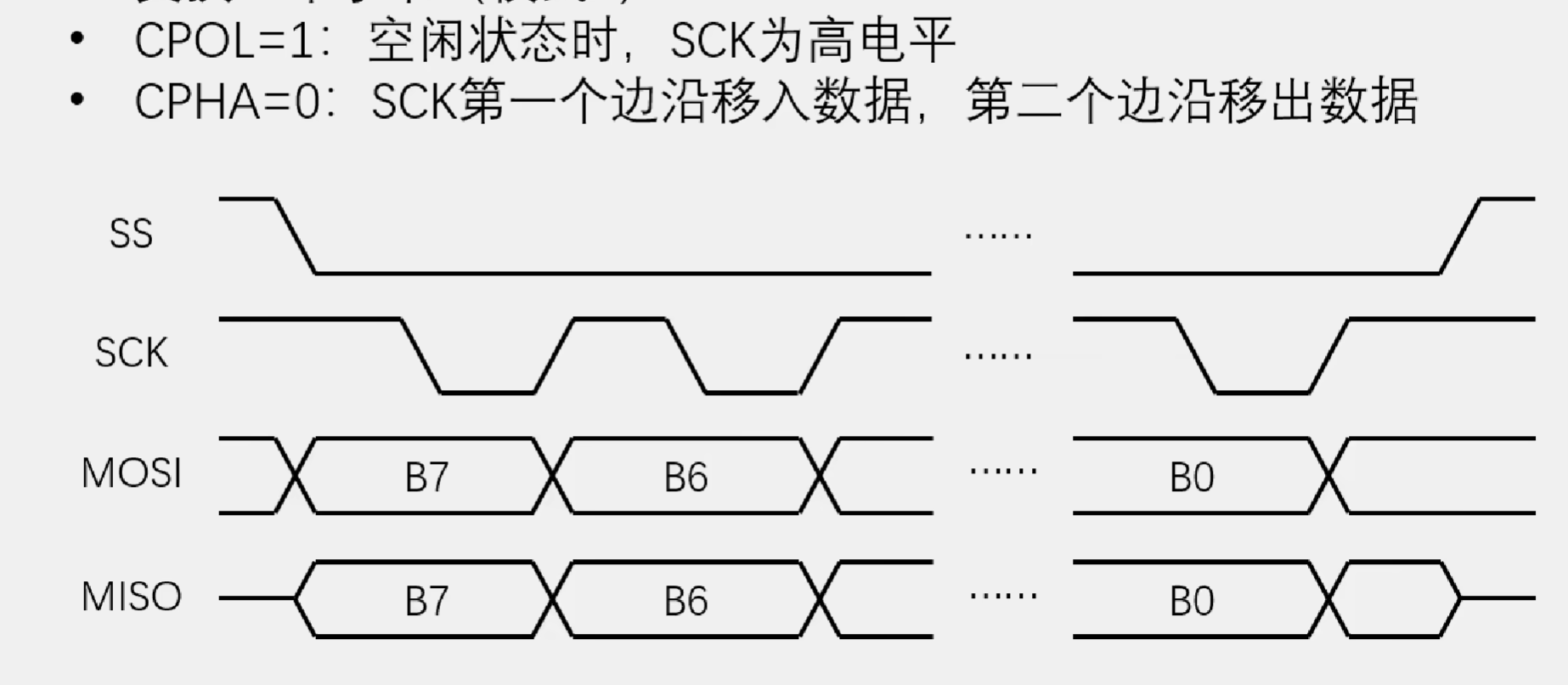
? ? ? ? 3.3.1 模式0
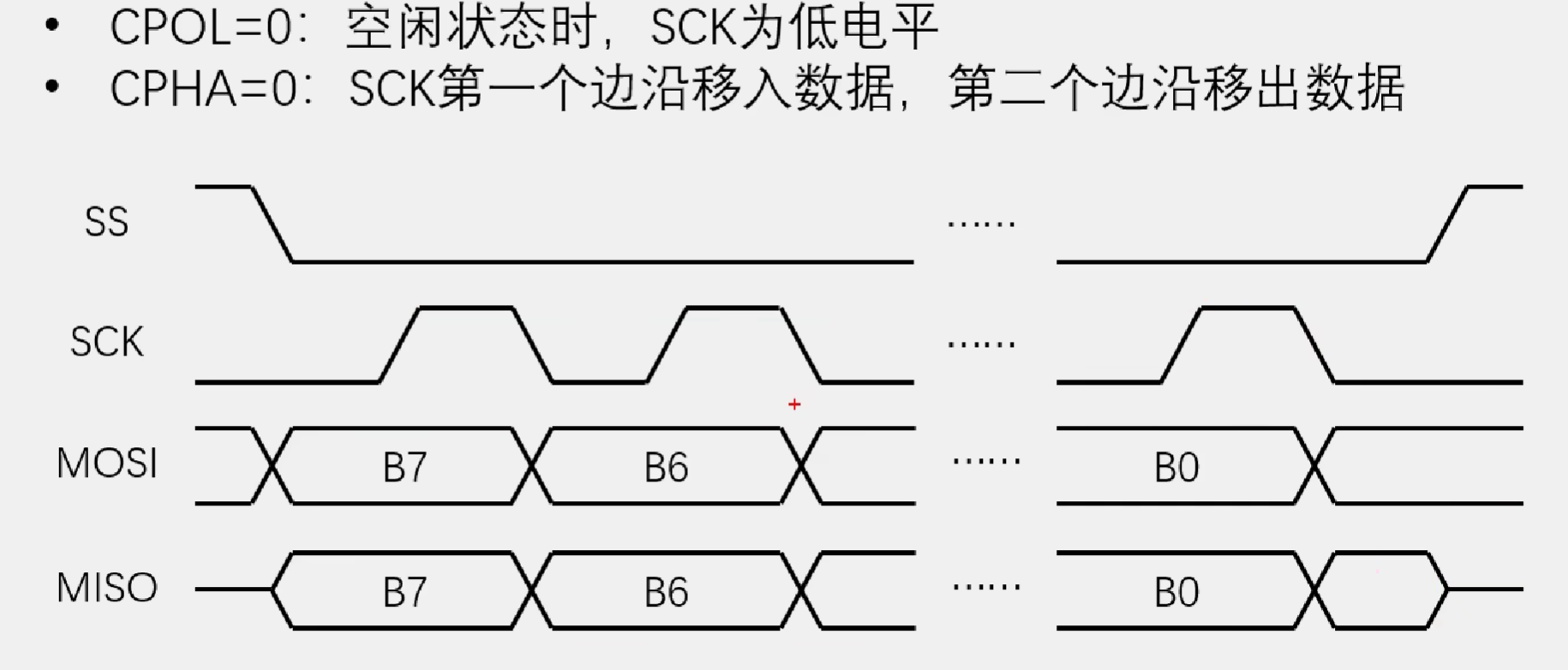
? ? ? ? SCK在上升沿的時候完成數據交換,在下降沿的時候移出數據,這就要求數據在SCK上升沿之前就要把數據移出,?相較于模式一相當于移出數據提前了半個相位。
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{uint8_t receive = 0x00 , i=0;for(i = 0 ; i < 8 ; i++){MySPI_W_MOSI(ByteSend & (0x80 >> i));MySPI_W_SCK(1);if(MySPI_R_MISO() == 1){receive |= (0x80 >> i);}MySPI_W_SCK(0);}return receive;
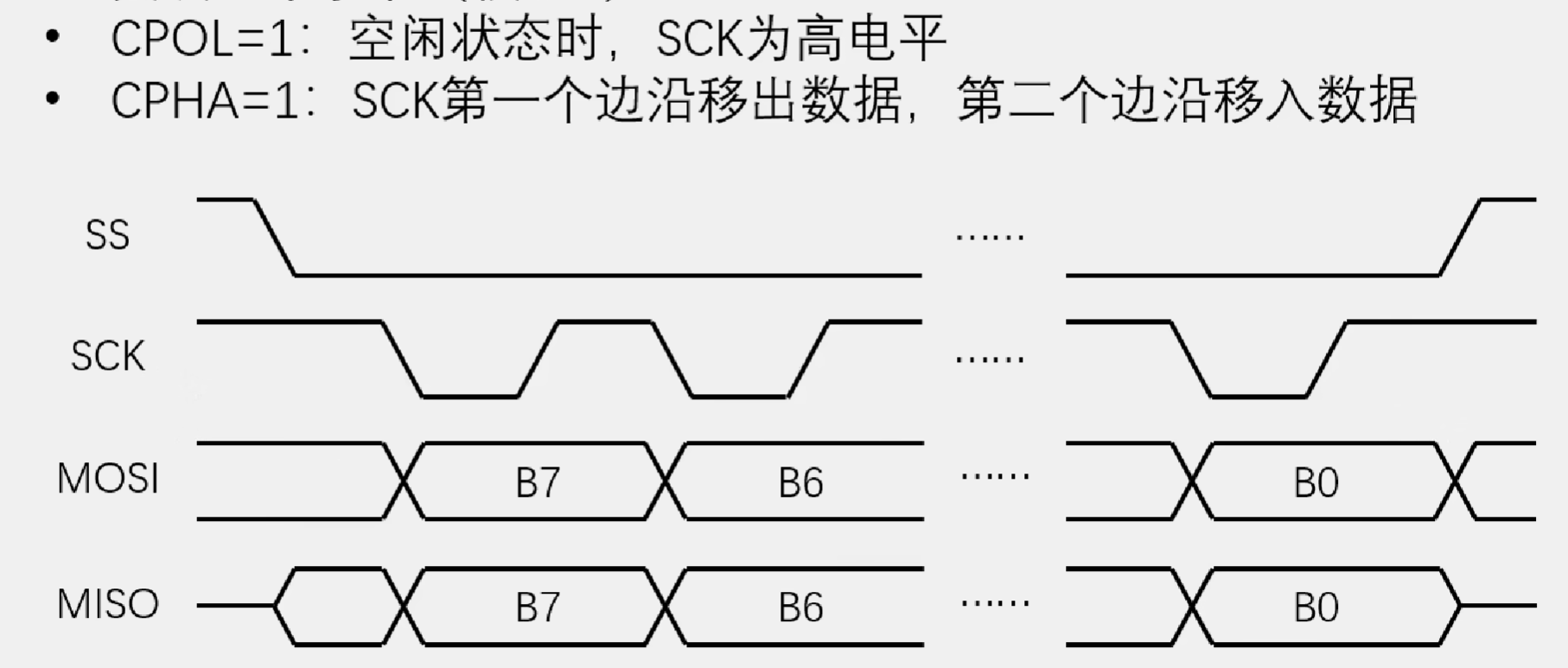
}? ? ? ? 3.3.2 模式1
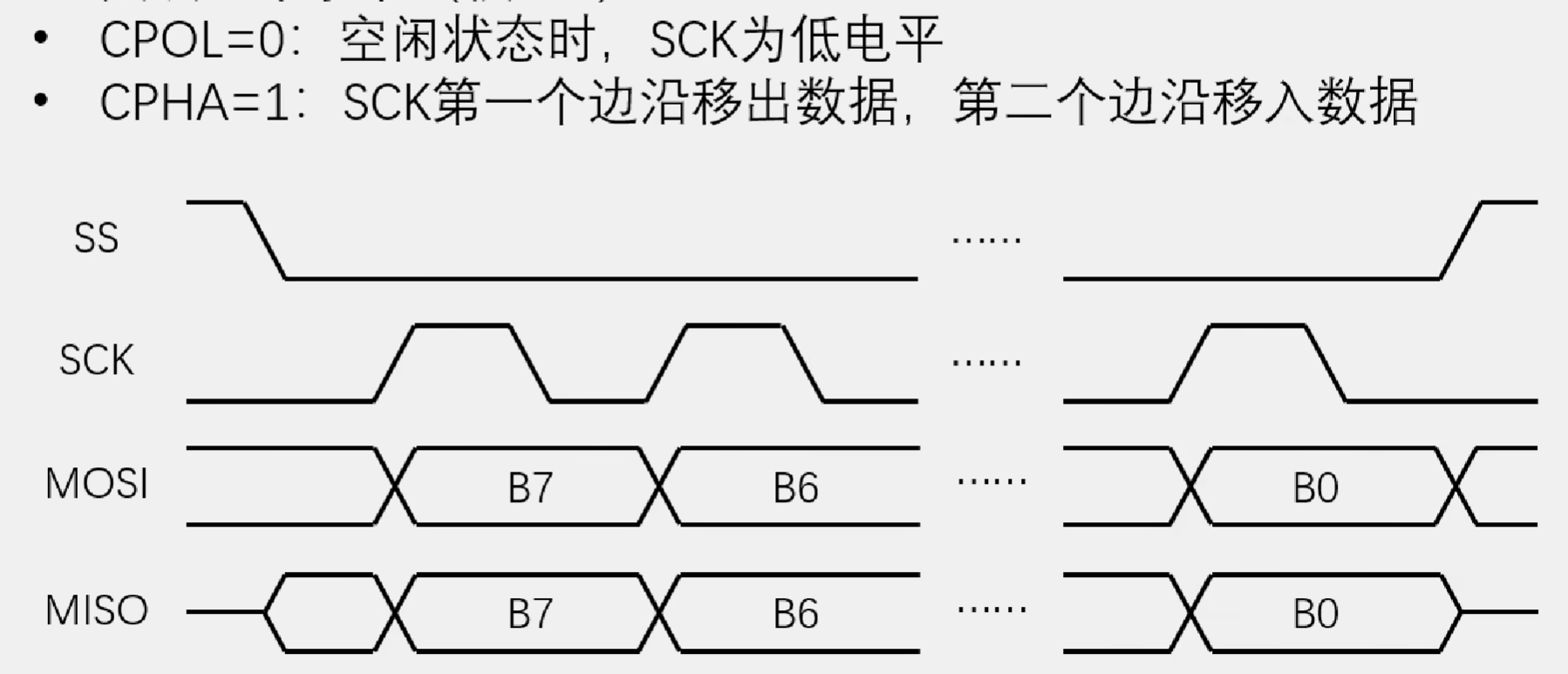
????????SCK在上升沿的時候主機和從機進行數據移位到對應的MOSI和MIS線上,在下降沿的時候移入數據。這樣就完成了一位數據的交換。重復八次就完成了一個字節數據的交換。
? ? ? ? 3.3.3?模式2
?????????SCK和模式0極性相反,也是提前移出數據,但是在SCK下降沿移入數據,上升沿移出數據。
? ? ? ? 3.3.4?模式3
? ? ? ? SCK和模式1的極性相反,SCK下降沿移出數據,上升沿移入數據
????????3.3.5?注意:
????????CPHA只規定是在第一個時鐘沿移入數據還是在第二個時鐘沿移入數據,并不特指上升沿或下降沿。需要配合CPOL才能確定上升沿還是下降沿。
? ? ??
4.W25Q64
4.1簡介
W25Oxx系列是一種低成本、小型化、使用簡單的非易失性存儲器
常應用于數據存儲、字庫存儲、固件程序存儲等場景
存儲介質:NorFlash(閃存)
時鐘頻率:180MHz/160MHz(DualSP)/320MHz(Ouad SPl)
? ? ? ? ? ? ? ? Dual是雙重SPI,是指發送的時候同時用MOSI和MISO同時進行發送,減少資源浪費。
????????????????Quad是四重SPI,是在雙重的基礎上再加上HOLD和WP兩條數據線進行傳輸。
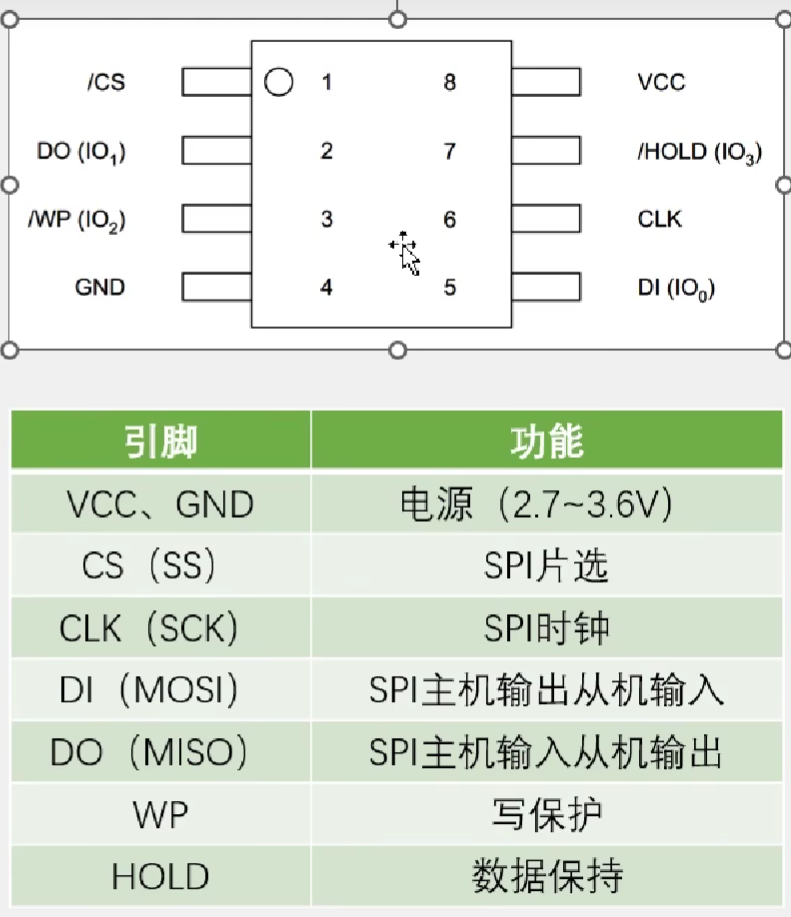
4.2 引腳定義
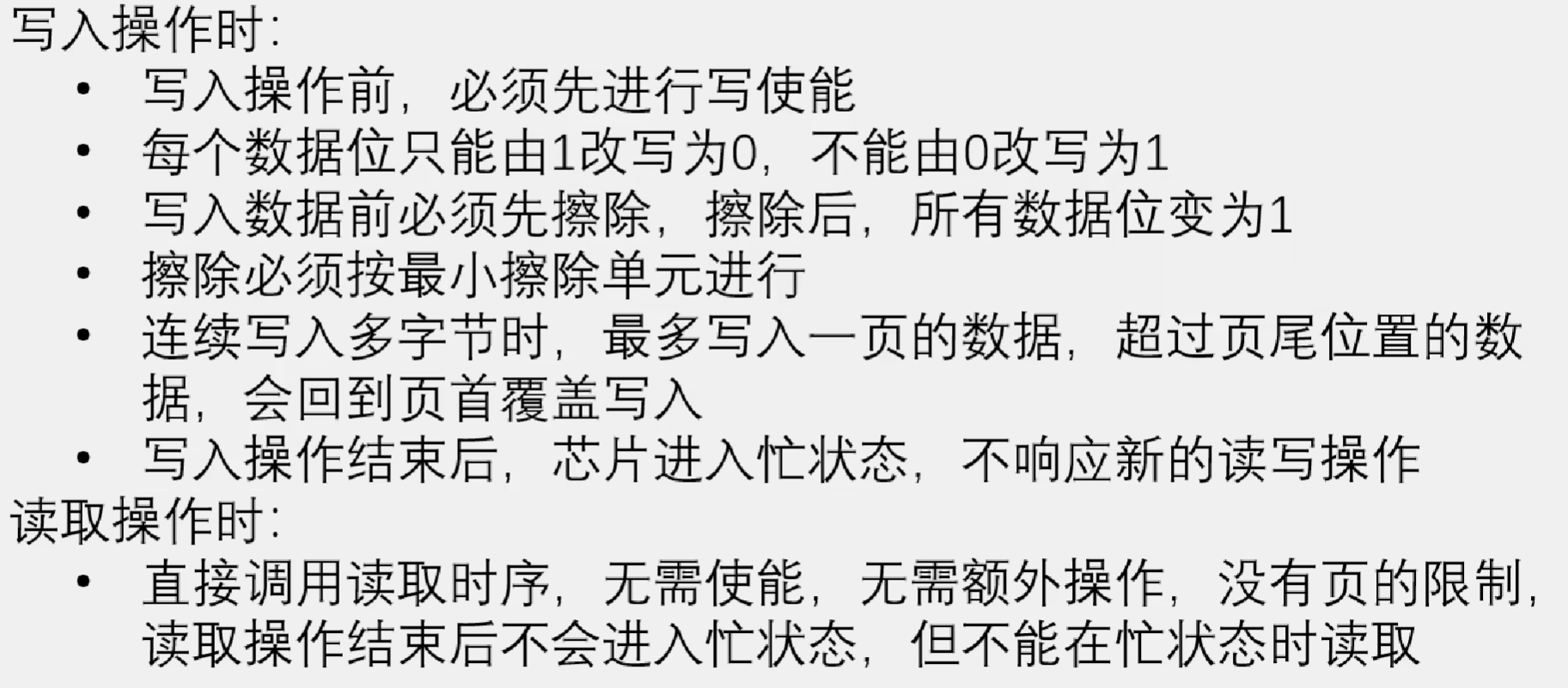
4.3 Flash寫入注意事項
4.4??操作W25Q64(軟件SPI)
? ? ? ? 4.4.1 寫使能
void W25Q64_WriteEnable(void)
{MySPI_Start();MySPI_SwapByte(W25Q64_WRITE_ENABLE);MySPI_Stop();
}
????????
? ? ? ? 4.4.2 等待空閑
void W25Q64_WaitBusy(void)
{uint32_t timeout = 0;MySPI_Start();MySPI_SwapByte(W25Q64_READ_STATUS_REGISTER_1);while((MySPI_SwapByte(W25Q64_DUMMY_BYTE) & 0x01) == 1){timeout++;if(timeout == 100000)break;}MySPI_Stop();
}? ? ? ? 4.4.3 頁寫
void W25Q64_PageProgram(uint32_t Address , uint8_t *data , uint8_t Count)
{W25Q64_WriteEnable();MySPI_Start();MySPI_SwapByte(W25Q64_PAGE_PROGRAM );MySPI_SwapByte(Address >> 16);MySPI_SwapByte(Address >> 8);MySPI_SwapByte(Address);for(uint8_t i = 0; i<Count ; i++){MySPI_SwapByte(data[i]);}MySPI_Stop();W25Q64_WaitBusy();
}
? ? ? ? 4.4.4 扇區擦除
void W25Q64_SectorErase(uint32_t Address )
{W25Q64_WriteEnable();MySPI_Start();MySPI_SwapByte(W25Q64_SECTOR_ERASE_4KB );MySPI_SwapByte(Address >> 16);MySPI_SwapByte(Address >> 8);MySPI_SwapByte(Address);MySPI_Stop();W25Q64_WaitBusy();
}?????????4.4.5 讀數據
void W25Q64_ReadData(uint32_t Address , uint8_t *data , uint32_t Count)
{MySPI_Start();MySPI_SwapByte(W25Q64_READ_DATA );MySPI_SwapByte(Address >> 16);MySPI_SwapByte(Address >> 8);MySPI_SwapByte(Address);for(uint32_t i = 0; i < Count ; i++){data[i] = MySPI_SwapByte(W25Q64_DUMMY_BYTE);}MySPI_Stop();
}
4.5? 操作W25Q64(硬件SPI)
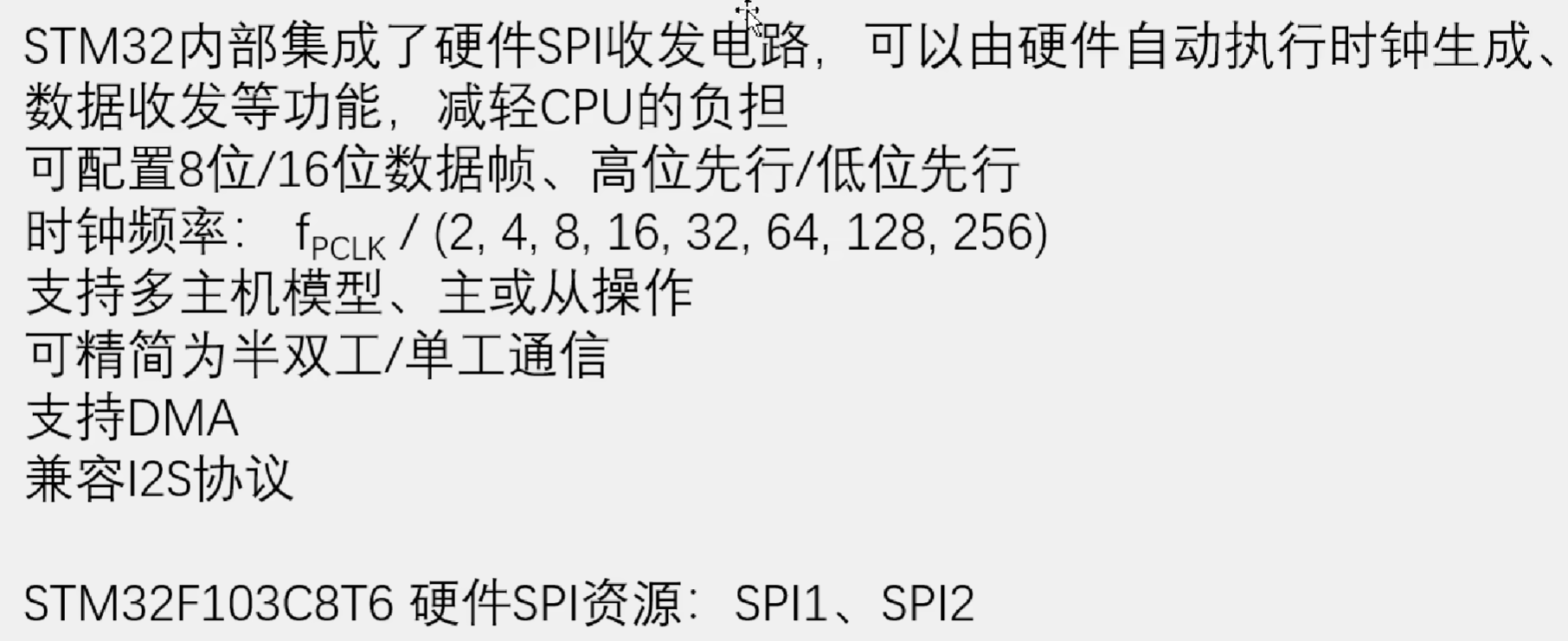
4.5.1 硬件SPI簡介
4.5.2 硬件SPI初始化
void MySPI_Init(void)
{/*開啟時鐘*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //開啟GPIOA的時鐘RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE); //開啟SPI1的時鐘/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //將PA4引腳初始化為推挽輸出GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //將PA5和PA7引腳初始化為復用推挽輸出GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //將PA6引腳初始化為上拉輸入/*SPI初始化*/SPI_InitTypeDef SPI_InitStructure; //定義結構體變量SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //模式,選擇為SPI主模式SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //方向,選擇2線全雙工SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //數據寬度,選擇為8位SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //先行位,選擇高位先行SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_128; //波特率分頻,選擇128分頻SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //SPI極性,選擇低極性SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //SPI相位,選擇第一個時鐘邊沿采樣,極性和相位決定選擇SPI模式0SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS,選擇由軟件控制SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC多項式,暫時用不到,給默認值7SPI_Init(SPI1, &SPI_InitStructure); //將結構體變量交給SPI_Init,配置SPI1/*SPI使能*/SPI_Cmd(SPI1, ENABLE); //使能SPI1,開始運行/*設置默認電平*/MySPI_W_SS(1); //SS默認高電平
}?4.5.3硬件SPI交換數據
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) != SET); //等待發送數據寄存器空SPI_I2S_SendData(SPI1, ByteSend); //寫入數據到發送數據寄存器,開始產生時序while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) != SET); //等待接收數據寄存器非空return SPI_I2S_ReceiveData(SPI1); //讀取接收到的數據并返回
}




)


:[macOS 64bit App開發]: 跨平臺開發同樣支持retain()引用計數器處理.](http://pic.xiahunao.cn/[原創](現代Delphi 12指南):[macOS 64bit App開發]: 跨平臺開發同樣支持retain()引用計數器處理.)


)




)

,光學字符識別)
