六軸機器人和七軸機器人在設計、功能和應用場景上存在明顯區別。六軸機器人是工業機器人的傳統架構,而七軸機器人則在多自由度和靈活性方面進行了增強。
本文將在理解這兩者的區別以及為何六軸機器人仍然是市場主流,從多個方面進行深入解讀六軸和七軸區別:
1. 軸的定義與操作自由度
六軸機器人具備六個自由度,每個關節提供一個獨立的旋轉角度。這使得機器人可以完成復雜的三維空間運動,適應多種工業應用,如搬運、焊接、噴涂等。六個自由度足以覆蓋大多數常見的操作任務,因此它被廣泛采用。
典型六軸機器人
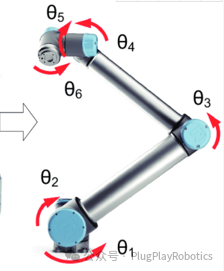
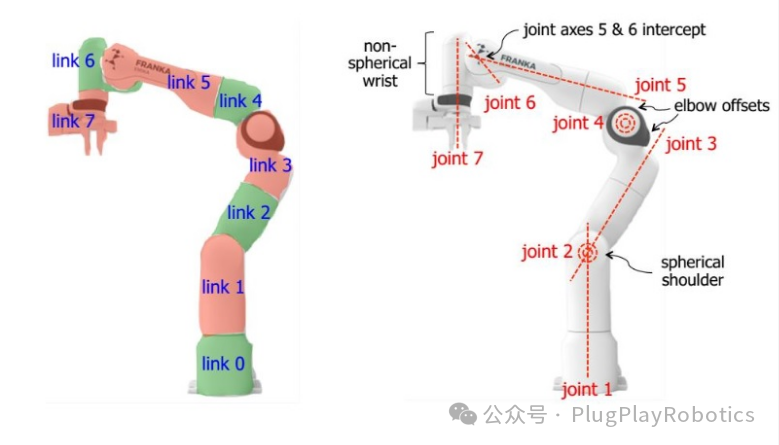
七軸機器人多了一個自由度(通常是在手臂的肘部或肩部處增加一個旋轉關節)。這個額外的軸讓機器人可以繞開障礙物或更靈活地調整姿態,從而提高機器人在狹小或復雜環境中的適應性。
Franka七軸機器人自由度表示
2. 靈活性與應用場景
六軸機器人能夠執行復雜的運動軌跡,并且已經在工業應用中充分證明了其靈活性。它們通過特定的關節配置,可以實現廣泛的任務。然而,六軸機器人在某些特定場景下(如空間受限或需要規避障礙的任務)可能存在操作局限性。
典型六軸機器人

六軸機器人固定工位,善于重復性產線操作
七軸機器人因為額外的關節,具備更多的運動自由度,允許它們在同一個姿勢下以不同的路徑完成任務。這種靈活性非常適合高要求的場景,如醫療手術、組裝精密設備或在狹小的工作區域進行復雜的任務。這種優勢通常在特定場景下顯得特別明顯。

分體式腔鏡種七軸力控機器人(FRNAKA)柔性操作
3. 成本與復雜性
六軸機器人由于已經經過長期的標準化和規模化生產,具備成本優勢。其設計相對成熟,制造和維護成本低。因為它們已經在大量的應用中證明了可靠性,企業選擇六軸機器人通常能獲得較高的性價比。
七軸機器人的復雜性更高,額外的關節增加了機械和控制系統的復雜度。這不僅提高了制造成本,還增加了對運動控制的要求。多出一個軸意味著控制系統必須處理更多的運動數據和調節機制,從而提升了編程難度和使用成本。
4. 控制系統與算法
六軸機器人的運動控制已經有成熟的軟件支持,其編程相對簡單,適合大部分常見的工業任務。大多數企業有現成的六軸機器人編程平臺和開發經驗,容易上手和部署。
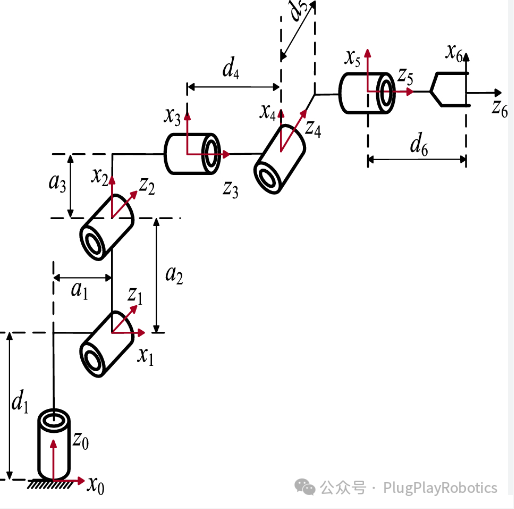
六軸機器人關節表述
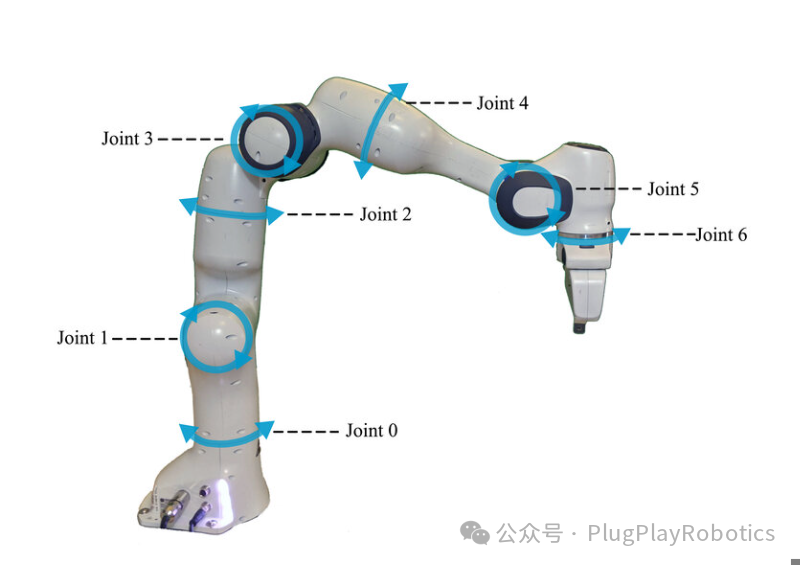
七軸機器人雖然提供了額外的靈活性,但編程相對復雜,因為多出來的自由度需要更精準的路徑規劃和運動控制。這對開發者和技術人員提出了更高的要求,需要更強大的編程和控制能力。
七軸機器人關節表述
逆解區別:
一般六軸機械臂的一個末端姿態會對應幾組不同的逆解。但是,這幾組逆解在構形空間內是離散分布的,一般情況下無法在保證末端位姿的情況下從一組逆解變換到另一組逆解。換句話說,讓機器人末端走一條固定軌跡,如果兩個點中間存在一些不可通過的點(障礙物,奇異點之類),那么六軸機械臂是無法完成這條軌跡的。
對于七軸機械臂的話,它多了一個冗余自由度,存在無數組在構形空間內連續的逆解,有可能在保證末端軌跡的同時避開奇異的和障礙物。七軸機器人在使用傳統的D-H模型求逆解的話會得到無數個解,一般選擇先給定多出來的大臂扭轉關節的角度,再求解其余6個自由度,增加了計算的復雜性。但是在人工智能和算力足夠的大模型時代,七軸機器人越來越發揮著其獨特的優勢,甚至期待的自由度更高,例如八軸,九軸。但是為什么不做八軸、九軸機械臂,答案簡要回答是是七軸大部分情況下已經夠用了,增加關節會降低剛度。


VTK C++開發示例 --- 繪制多面錐體)
和閉源(僅限內部),以及公共(全員可訪問)和內部(特定團隊/項目組)四個維度)




)










)